Clear Sky Science · de
Effiziente anomale Erkennung in industriellen Punktwolken durch räumliche Kontextaggregation und selektive Generierung anomaler Merkmale
Warum winzige Fehler in 3D wirklich von Bedeutung sind
Von Turbinenschaufeln bis zu Smartphonegehäusen: Moderne Produkte bestehen aus Bauteilen, deren Oberflächen nahezu makellos sein müssen. Ein Haarriß oder eine kaum sichtbare Delle kann zu einem ernsthaften Ausfall heranwachsen, doch Fabriken haben nach wie vor Schwierigkeiten, solche Mängel schnell und zuverlässig zu erkennen – insbesondere bei komplexen 3D‑Formen. Dieses Papier stellt eine schnelle, automatisierte Methode vor, dreidimensionale Objekte als „Punktwolken“ zu scannen und verdächtige Bereiche in Echtzeit zu markieren, mit dem Ziel, hochpräzise Qualitätskontrollen sicherer und effizienter zu machen.
Von flachen Bildern zur vollständigen 3D‑Form
Die meisten bestehenden Inspektionssysteme basieren auf normalen Fotografien oder 2D‑Bildern. Diese Verfahren haben sich stark verbessert, komprimieren die reale Welt dabei jedoch weiterhin auf eine Ebene. Liegt ein Defekt an einer gekrümmten Kante, im Schatten oder verändert er nur die Oberflächentiefe, kann eine 2D‑Ansicht ihn übersehen. Dagegen erfasst eine 3D‑Punktwolke die vollständige Form eines Objekts als Tausende bis Millionen kleiner Punkte im Raum. Diese reichere Darstellung ermöglicht es, Ausbeulungen, Grübchen, Kratzer und fehlendes Material zu erkennen, die auf einem Foto unsichtbar bleiben könnten. Allerdings ist die Arbeit direkt mit 3D‑Daten anspruchsvoll: Formen können komplex sein, Sensoren erzeugen Rauschen und Lücken, und echte Defekte sind selten dokumentiert, was es Standard‑Maschinenlernverfahren erschwert zu lernen, was als „abnormal“ gilt.
Eine schlanke vierstufige Inspektionspipeline
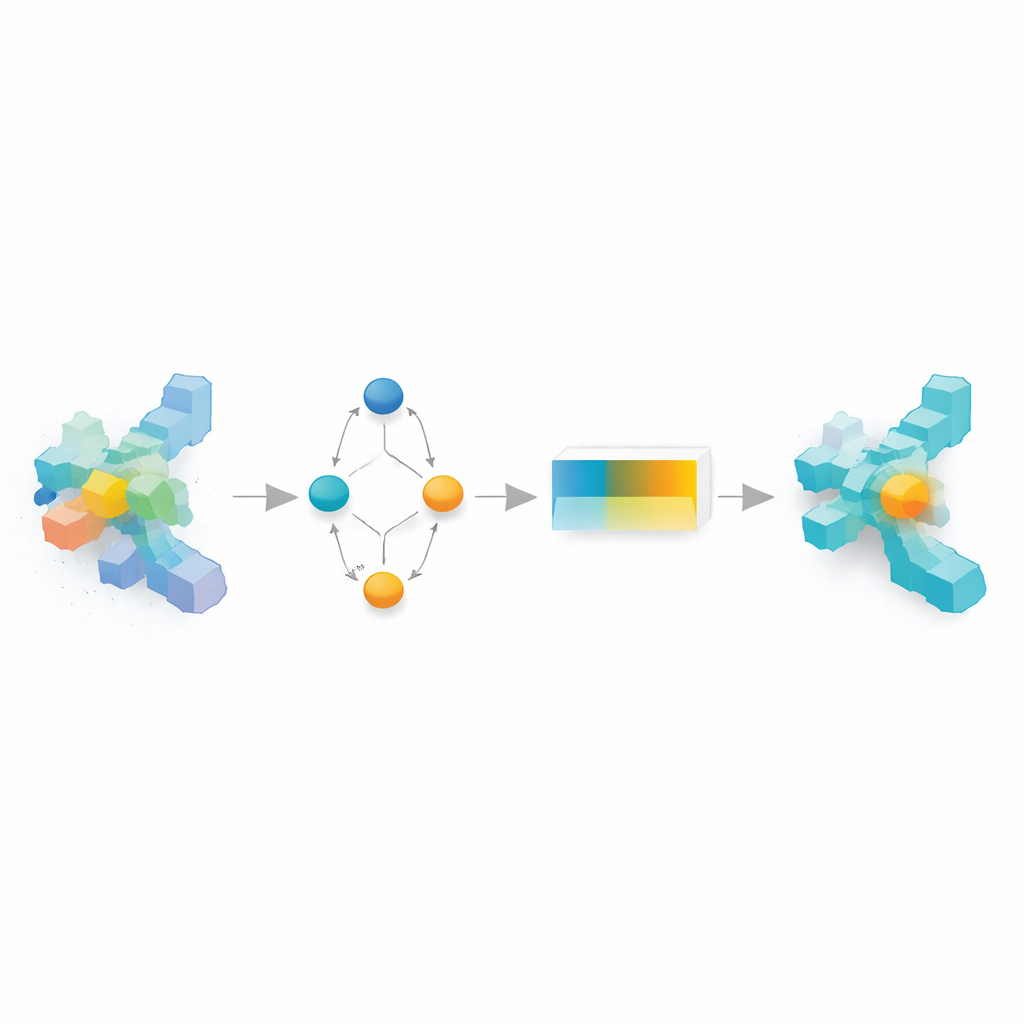
Die Autoren schlagen eine kompakte Pipeline vor, die 3D‑Inspektion als einen einzigen schnellen Durchlauf von Rohdaten zu einer „Anomaliekarte“ behandelt, die zeigt, wo Probleme lauern könnten. Zuerst teilt das System die Punktwolke in viele kleine, überlappende Patches und fasst jeden durch ein numerisches Token zusammen, gewonnen mit einem leistungsfähigen, aber eingefrorenen 3D‑Formencoder, der zuvor auf einer großen Bibliothek generischer Modelle trainiert wurde. Es folgt die Aggregation des räumlichen Kontexts: Jeder lokale Patch wird mit einer kleinen Menge repräsentativer Prototypen in Beziehung gesetzt, die die Gesamtstruktur des Objekts erfassen. Durch sorgfältiges Abgleichen von Patches mit Prototypen unter Berücksichtigung sowohl der Position als auch der lokalen Geometrie kann die Methode erkennen, ob eine Wölbung eine harmlose Krümmung oder eine verdächtige, fehlplatzierte Auswölbung ist. Ein leichter Adapter‑Netzwerk formt diese Merkmale dann behutsam so um, dass sie besser zu den Besonderheiten industrieller Scans passen, wie Sensorausrauschen und Reflexionen, ohne die hohen Kosten eines vollständigen Retrainings des Encoders.
Dem System beibringen, wie „falsch“ aussieht
In realen Fabriken existieren selten große, gut beschriftete Sammlungen defekter Teile, wodurch überwachtes Training unpraktisch wird. Um dies zu umgehen, erfindet die Methode eigene „gefälschte Defekte“ direkt im Merkmalsraum. Während des Trainings wählt sie zufällig eine Teilmenge der Patch‑Tokens aus und stört diese subtil mit Rauschen, während der Rest unverändert bleibt. Diese korrumpierten Patches dienen als harte Negativbeispiele: Sie sind normalitätsnah genug, um herausfordernd zu sein, aber ausreichend verändert, um potenzielle Mängel zu simulieren. Ein kleines, auf Attention basierendes Netzwerk lernt dann, saubere von korrumpierten Patches zu unterscheiden, wobei es berücksichtigt, wie jeder Patch in die größere Form passt. Nach Abschluss des Trainings wird der Rauschgenerator abgeschaltet und das Netzwerk gibt für jede Region einer neuen Punktwolke in einem einzigen Vorwärtsdurchlauf einen Anomalie‑Wert aus, der anschließend als farbcodierte Defektkarte auf die Oberfläche projiziert werden kann.
Erprobung des Ansatzes
Um zu prüfen, wie gut dieses Design in der Praxis funktioniert, evaluierten die Forscher es an zwei anspruchsvollen Datensätzen. Real3D‑AD enthält hochdetaillierte Scans von zwölf Objektklassen mit sorgfältig beschrifteten Wölbungen und Vertiefungen, während der neu eingeführte Industrial3D‑AD unordentliche reale Bedingungen widerspiegelt: Sensorausrauschen, teilweise Ansichten, glänzende Materialien und subtile Schäden wie feine Kratzer und winzige Vertiefungen. In beiden Datensätzen übertraf die neue Methode konsequent eine Reihe moderner 3D‑Anomalieerkennungsverfahren — nicht nur bei der Fähigkeit, fehlerhafte Bereiche exakt zu lokalisieren, sondern auch im Ausbalancieren von übersehenen Defekten gegenüber Fehlalarmen. Entscheidend ist, dass sie dies bei einer Ausführungsgeschwindigkeit von mehr als 13 Frames pro Sekunde auf einer einzelnen modernen Grafikkarte erreichte, wodurch eine kontinuierliche Inline‑Inspektion realisierbar wird.
Was das für Alltagsprodukte bedeutet
Kurz gesagt zeigt die Studie, dass eine intelligentere Nutzung von 3D‑Forminformationen automatische Qualitätskontrollen sowohl schärfer als auch schneller machen kann. Indem jeder lokale Oberflächenpatch in den größeren Kontext eingebettet, generisches Formwissen an industrielle Bedingungen angepasst und realistische „Übungsdefekte“ erzeugt werden, kann die Methode zuverlässig verdächtige Oberflächenregionen hervorheben, ohne große Defektdatensätze oder hohe Rechenleistung zu benötigen. Für Hersteller könnte das eine frühere Erkennung winziger Fehler, weniger Rückrufe und sicherere, zuverlässigere Produkte für Verbraucher bedeuten.
Zitation: Hoang, DC., Tan, P.X., Nguyen, AN. et al. Efficient industrial point cloud anomaly detection via spatial context aggregation and selective anomalous feature generation. Sci Rep 16, 10309 (2026). https://doi.org/10.1038/s41598-026-41255-2
Schlüsselwörter: 3D-Anomalieerkennung, industrielle Inspektion, Punktwolkenfehler, Oberflächenqualitätskontrolle, automatisierte visuelle Inspektion