Clear Sky Science · it
Rilevamento efficiente delle anomalie in nuvole di punti industriali tramite aggregazione del contesto spaziale e generazione selettiva di caratteristiche anomale
Perché i difetti microscopici in 3D contano davvero
Dalle pale di motori aerei alle scocche degli smartphone, i prodotti moderni contengono componenti le cui superfici devono essere quasi perfette. Una microfessura o una piccola ammaccatura possono evolvere in un guasto serio, eppure le fabbriche faticano ancora a individuare questi difetti in modo rapido e affidabile, soprattutto su forme 3D complesse. Questo articolo presenta un metodo rapido e automatizzato per scansionare oggetti tridimensionali come “nuvole di punti” e segnalare in tempo reale le aree sospette, con l’obiettivo di rendere il controllo qualità ad alta precisione più sicuro ed efficiente.
Dalle immagini piatte alla forma 3D completa
La maggior parte dei sistemi di ispezione esistenti si basa su fotografie o immagini 2D. Questi approcci sono molto migliorati, ma comprimono comunque il mondo reale su una superficie piana. Quando un difetto si trova su un bordo curvo, in ombra o modifica solo la profondità della superficie, una vista 2D può non rilevarlo. Al contrario, una nuvola di punti 3D registra l’intera forma di un oggetto come migliaia o milioni di minuscoli punti nello spazio. Questa descrizione più ricca rende possibile rilevare rigonfiamenti, incavi, graffi e mancanza di materiale che potrebbero essere invisibili in una fotografia. Tuttavia, lavorare direttamente sui dati 3D è impegnativo: le forme possono essere intricate, i sensori introducono rumore e lacune, e gli esempi di difetti reali sono scarsi, rendendo difficile per i metodi di machine learning standard imparare cosa sia “anormale”.
Una pipeline d’ispezione snella in quattro fasi
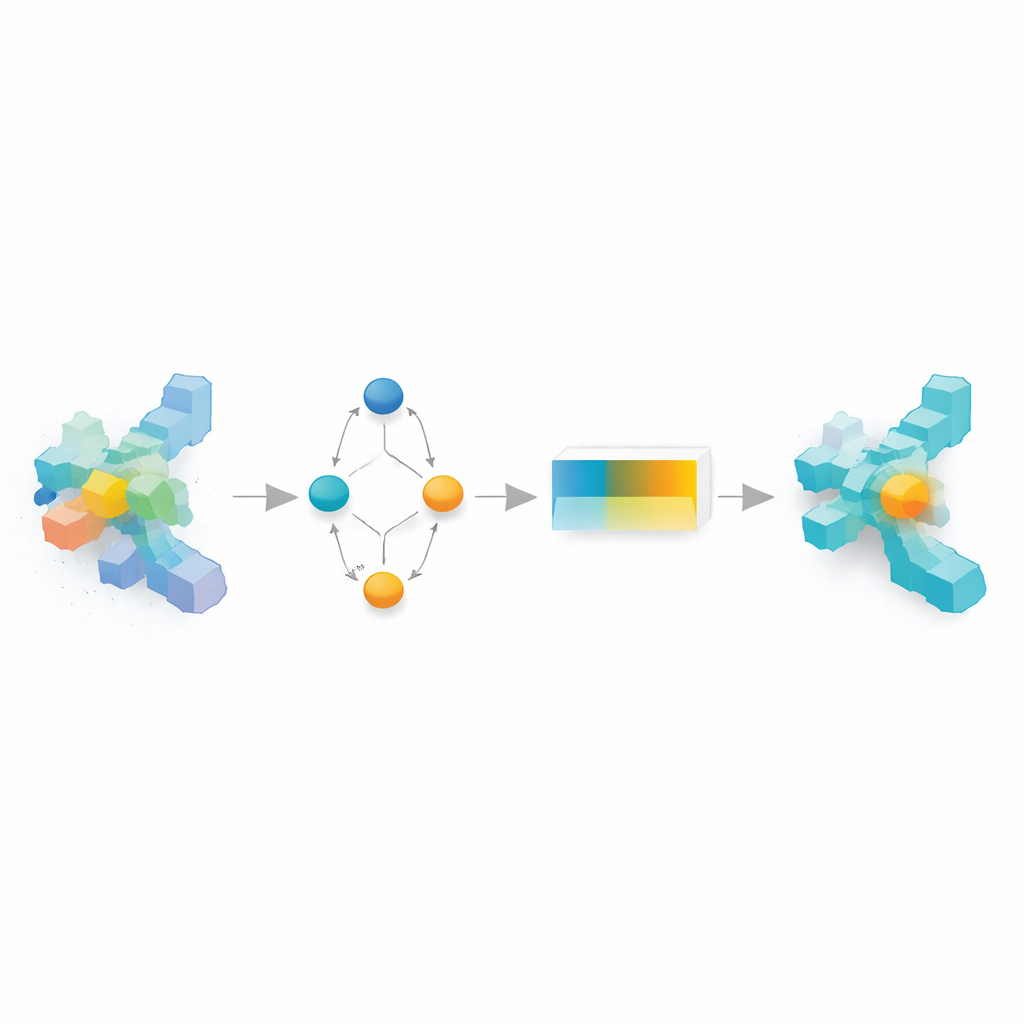
Gli autori propongono una pipeline compatta che tratta l’ispezione 3D come un unico passaggio rapido dai dati grezzi a una “mappa di anomalie” che mostra dove potrebbero nascondersi problemi. Innanzitutto, il sistema suddivide la nuvola di punti in molte piccole patch sovrapposte, ognuna riassunta da un token numerico tramite un potente ma congelato encoder di forme 3D preaddestrato su un’ampia libreria di modelli generici. Segue l’aggregazione del contesto spaziale: ogni patch locale viene associata a un piccolo insieme di prototipi rappresentativi che catturano la struttura complessiva dell’oggetto. Abbinando con cura patch e prototipi in base sia alla posizione sia alla geometria locale, il metodo può distinguere se un rigonfiamento è una curva innocua o un gonfiore sospetto fuori posto. Una rete adattatrice leggera quindi rimodella con parsimonia queste caratteristiche per farle meglio corrispondere alle specificità delle scansioni industriali, come il rumore dei sensori e la riflettività, senza l’onere di riaddestrare l’intero encoder.
Insegnare al sistema cosa significa “sbagliato”
Nelle fabbriche reali raramente sono disponibili grandi collezioni ben etichettate di pezzi difettosi, il che rende impraticabile l’addestramento supervisionato. Per superare questo limite, il metodo crea i propri “difetti finti” direttamente nello spazio delle caratteristiche. Durante l’addestramento, sceglie casualmente un sottoinsieme di token di patch e li perturba sottilmente con rumore, lasciando inalterati gli altri. Queste patch corrotte fungono da esempi negativi difficili: sono abbastanza vicine al normale da risultare impegnative, ma sufficientemente diverse da somigliare a potenziali difetti. Una piccola rete basata sull’attenzione impara quindi a distinguere patch pulite da patch corrotte considerando anche come ciascuna patch si inserisce nella forma più ampia. Al termine dell’addestramento, il generatore di rumore viene disattivato e la rete fornisce, in un singolo forward pass, un punteggio di anomalia per ogni regione di una nuova nuvola di punti, che può poi essere proiettato sulla superficie come una mappa dei difetti codificata a colori.
Mettere l’approccio alla prova
Per valutare l’efficacia del progetto, i ricercatori lo hanno testato su due dataset impegnativi. Real3D-AD contiene scansioni ultra‑dettagliate di dodici classi di oggetti, con rigonfiamenti e avvallamenti accuratamente annotati, mentre il recentemente introdotto Industrial3D-AD riflette condizioni reali disordinate: rumore dei sensori, viste parziali, materiali lucidi e danni sottili come graffi fini e piccolissimi avvallamenti. Su entrambi i dataset, il nuovo metodo ha costantemente superato una serie di detector di anomalie 3D allo stato dell’arte, non solo nella capacità di localizzare le aree problematiche ma anche nell’equilibrio tra difetti mancati e falsi allarmi. È fondamentale che abbia raggiunto questi risultati mantenendo un’operatività superiore a 13 frame al secondo su una singola moderna GPU, rendendo fattibile l’ispezione continua in linea.
Cosa significa per i prodotti di uso quotidiano
In termini semplici, lo studio dimostra che un uso più intelligente delle informazioni sulla forma 3D può rendere i controlli di qualità automatici più precisi e più veloci. Collegando ogni patch di superficie locale al quadro complessivo, adattando la conoscenza di forme generiche alle condizioni industriali e fabbricando “difetti di esercitazione” realistici, il metodo può evidenziare in modo affidabile le regioni superficiali sospette senza necessitare di grandi database di difetti o di calcoli pesanti. Per i produttori, ciò potrebbe tradursi in una rilevazione più precoce di microdifetti, meno richiami e prodotti più sicuri e affidabili per i consumatori.
Citazione: Hoang, DC., Tan, P.X., Nguyen, AN. et al. Efficient industrial point cloud anomaly detection via spatial context aggregation and selective anomalous feature generation. Sci Rep 16, 10309 (2026). https://doi.org/10.1038/s41598-026-41255-2
Parole chiave: rilevamento anomalie 3D, ispezione industriale, difetti in nuvole di punti, controllo qualità superficiale, ispezione visiva automatizzata