Clear Sky Science · nl
Efficiënte detectie van anomalieën in industriële point clouds via ruimtelijke contextaggregatie en selectieve generatie van afwijkende kenmerken
Waarom kleine oneffenheden in 3D echt belangrijk zijn
Van turbinebladen tot smartphonebehuizingen: moderne producten bevatten onderdelen waarvan het oppervlak vrijwel perfect moet zijn. Een haarscheurtje of een nauwelijks zichtbaar deukje kan uitgroeien tot een serieus falen, maar fabrieken hebben nog steeds moeite om zulke afwijkingen snel en betrouwbaar te detecteren, vooral op complexe 3D‑vormen. Dit artikel introduceert een snelle, geautomatiseerde manier om driedimensionale objecten als “point clouds” te scannen en verdachte gebieden in realtime aan te wijzen, met als doel hoogprecisies kwaliteitscontrole zowel veiliger als efficiënter te maken.
Van platte beelden naar volledige 3D‑vorm
De meeste bestaande inspectiesystemen vertrouwen op gewone foto’s of 2D‑beelden. Deze benaderingen zijn sterk verbeterd, maar ze comprimeren de echte wereld nog steeds tot een vlak. Wanneer een defect op een gebogen rand zit, in een schaduw valt of alleen de diepte van het oppervlak verandert, kan een 2D‑weergave het missen. Daarentegen legt een 3D‑point cloud de volledige vorm van een object vast als duizenden tot miljoenen kleine punten in de ruimte. Deze rijkere beschrijving maakt het mogelijk om bulten, putten, krassen en ontbrekend materiaal te detecteren die op een foto onzichtbaar zouden blijven. Direct werken met 3D‑gegevens is echter uitdagend: vormen kunnen complex zijn, sensoren voegen ruis en gaten toe, en voorbeelden van echte defecten zijn schaars, waardoor standaard machine‑learningmethoden moeilijk kunnen leren wat als “abnormaal” telt.
Een gestroomlijnde inspectiepijplijn in vier stappen
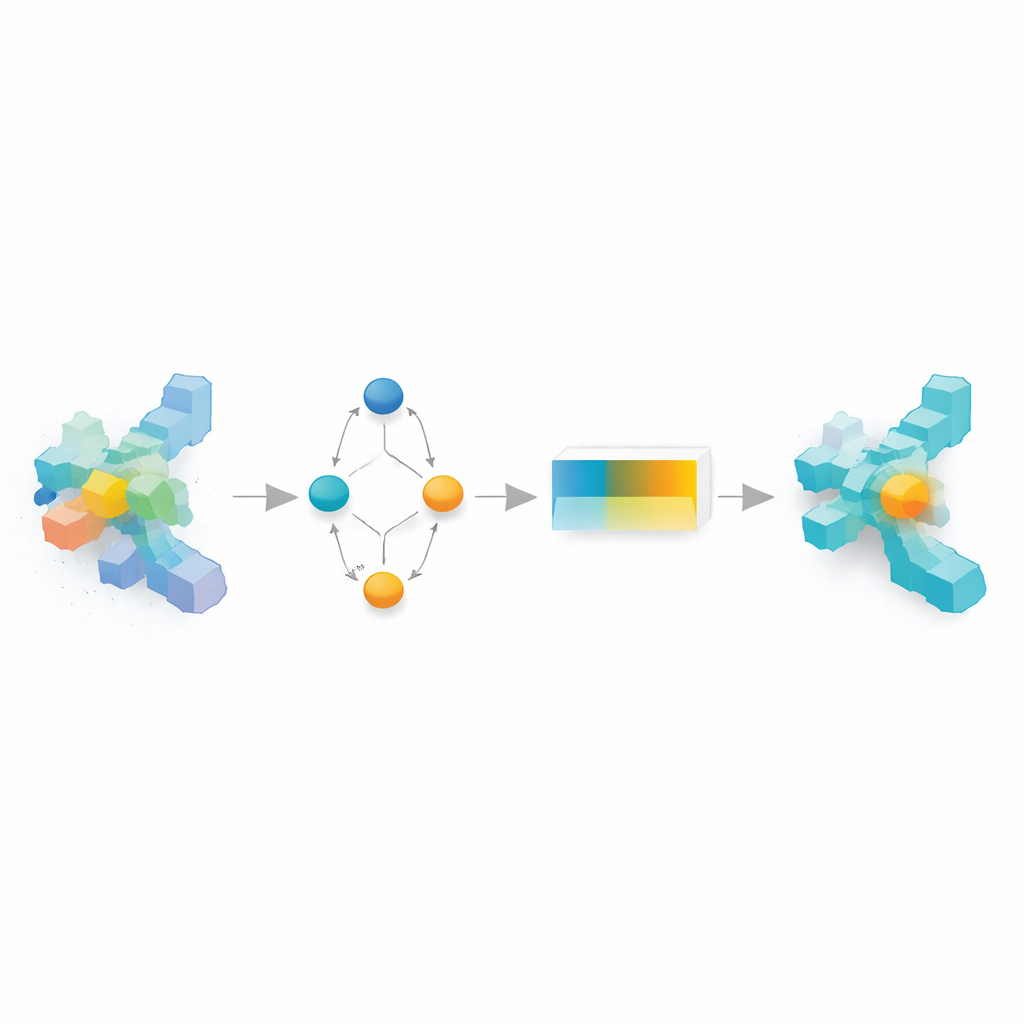
De auteurs stellen een compacte pijplijn voor die 3D‑inspectie behandelt als één snelle doorloop van rauwe gegevens naar een “anomaliekaart” die aangeeft waar problemen kunnen zitten. Eerst snijdt het systeem de point cloud in veel kleine overlappende patchen, elk samengevat door een numerieke token met behulp van een krachtige maar bevroren 3D‑shape‑encoder die vooraf is getraind op een grote bibliotheek van generieke modellen. Vervolgens komt ruimtelijke contextaggregatie: elke lokale patch wordt verbonden met een kleine set representatieve prototypes die de algemene structuur van het object vangen. Door patchen zorgvuldig te matchen met prototypes op basis van zowel positie als lokale geometrie, kan de methode onderscheiden of een bobbel een onschuldige kromming is of een verdachte, uit de toon vallende verhoging. Een lichte adapter‑netwerk past deze kenmerken vervolgens subtiel aan zodat ze beter aansluiten bij de eigenaardigheden van industriële scans, zoals sensorruis en reflectiviteit, zonder de hoge kosten van het hertrainen van de hele encoder.
Het systeem leren wat “fout” eruitziet
In echte fabrieken zijn grote, goed gelabelde verzamelingen defecte onderdelen zeldzaam, wat supervisietraining onpraktisch maakt. Om dit te omzeilen, verzint de methode haar eigen “fake defects” direct in de feature‑ruimte. Tijdens training wordt willekeurig een subset van patch‑tokens gekozen en subtiel verstoord met ruis, terwijl de rest onaangeroerd blijft. Deze gecorrumpeerde patchen dienen als harde negatieve voorbeelden: ze liggen dicht genoeg bij normaal om uitdagend te zijn, maar verschillen genoeg om op mogelijke afwijkingen te lijken. Een klein attentiegebaseerd netwerk leert vervolgens schone van gecorrumpeerde patchen te onderscheiden, terwijl het rekening houdt met hoe elke patch in de grotere vorm past. Zodra de training is voltooid, wordt de ruisgenerator uitgeschakeld en geeft het netwerk in één enkele voorwaartse pass een anomaliescore voor elk gebied van een nieuwe point cloud, die vervolgens terug op het oppervlak geprojecteerd kan worden als een kleurgecodeerde defectkaart.
De aanpak op de proef gesteld
Om te beoordelen hoe goed dit ontwerp in de praktijk werkt, evalueerden de onderzoekers het op twee veeleisende datasets. Real3D‑AD bevat ultradetailleerde scans van twaalf objectklassen, met zorgvuldig gelabelde bulten en putten, terwijl het nieuw geïntroduceerde Industrial3D‑AD rommelige echte‑wereldcondities weerspiegelt: sensorruis, gedeeltelijke aanzichten, glanzende materialen en subtiele schade zoals fijne krassen en kleine putjes. Over beide datasets heen presteerde de nieuwe methode consequent beter dan een reeks state‑of‑the‑art 3D‑anomaliedetectoren, niet alleen in het nauwkeurig aanwijzen van slechte regio’s maar ook in de balans tussen gemiste defecten en valse alarmen. Cruciaal is dat dit gebeurde terwijl het systeem met meer dan 13 frames per seconde draaide op één moderne grafische kaart, waardoor continue inline inspectie haalbaar wordt.
Wat dit betekent voor alledaagse producten
In eenvoudige bewoordingen laat de studie zien dat slimmer gebruik van 3D‑vorminformatie automatische kwaliteitscontroles zowel scherper als sneller kan maken. Door ieder lokaal oppervlaktepatch te koppelen aan het grotere geheel, generieke vormkennis aan te passen aan industriële omstandigheden en realistische “oefendefecten” te fabriceren, kan de methode betrouwbaar verdachte oppervlakgebieden benadrukken zonder grote defectdatabases of zware rekenkracht. Voor fabrikanten kan dit zich vertalen in vroegere detectie van kleine fouten, minder terugroepacties en veiligere, betrouwbaardere producten voor consumenten.
Bronvermelding: Hoang, DC., Tan, P.X., Nguyen, AN. et al. Efficient industrial point cloud anomaly detection via spatial context aggregation and selective anomalous feature generation. Sci Rep 16, 10309 (2026). https://doi.org/10.1038/s41598-026-41255-2
Trefwoorden: 3D anomaliedetectie, industriële inspectie, point cloud defecten, oppervlaktekwaliteitscontrole, geautomatiseerde visuele inspectie