Clear Sky Science · fr
Détection efficace d'anomalies sur nuages de points industriels via agrégation du contexte spatial et génération sélective de caractéristiques anormales
Pourquoi les micro-défauts 3D ont vraiment de l'importance
Des pales de turbine aux boîtiers de smartphone, les produits modernes comprennent des pièces dont les surfaces doivent être presque parfaites. Une fissure capillaire ou une bosse à peine visible peut évoluer en défaillance grave, et pourtant les usines peinent encore à repérer ce type de défaut rapidement et de manière fiable, surtout sur des formes 3D complexes. Cet article présente une méthode automatisée et rapide pour scanner des objets tridimensionnels sous forme de « nuages de points » et signaler en temps réel les zones suspectes, visant à rendre le contrôle qualité de haute précision à la fois plus sûr et plus efficace.
Des images plates à la forme 3D complète
La plupart des systèmes d'inspection existants reposent sur des photographies ou des images 2D. Ces approches se sont beaucoup améliorées, mais elles compriment toujours le monde réel sur une surface plane. Lorsqu'un défaut se trouve sur un bord courbe, dans une ombre, ou ne change que la profondeur de la surface, une vue 2D peut le manquer. En revanche, un nuage de points 3D enregistre la forme complète d'un objet sous la forme de milliers à des millions de petits points dans l'espace. Cette description plus riche permet de détecter des renflements, des creux, des rayures et des matériaux manquants qui pourraient être invisibles sur une photo. Toutefois, travailler directement sur des données 3D est exigeant : les formes peuvent être complexes, les capteurs ajoutent du bruit et des lacunes, et les exemples de défauts réels sont rares, ce qui complique l'apprentissage des méthodes classiques d'apprentissage automatique pour définir ce qui est « anormal ».
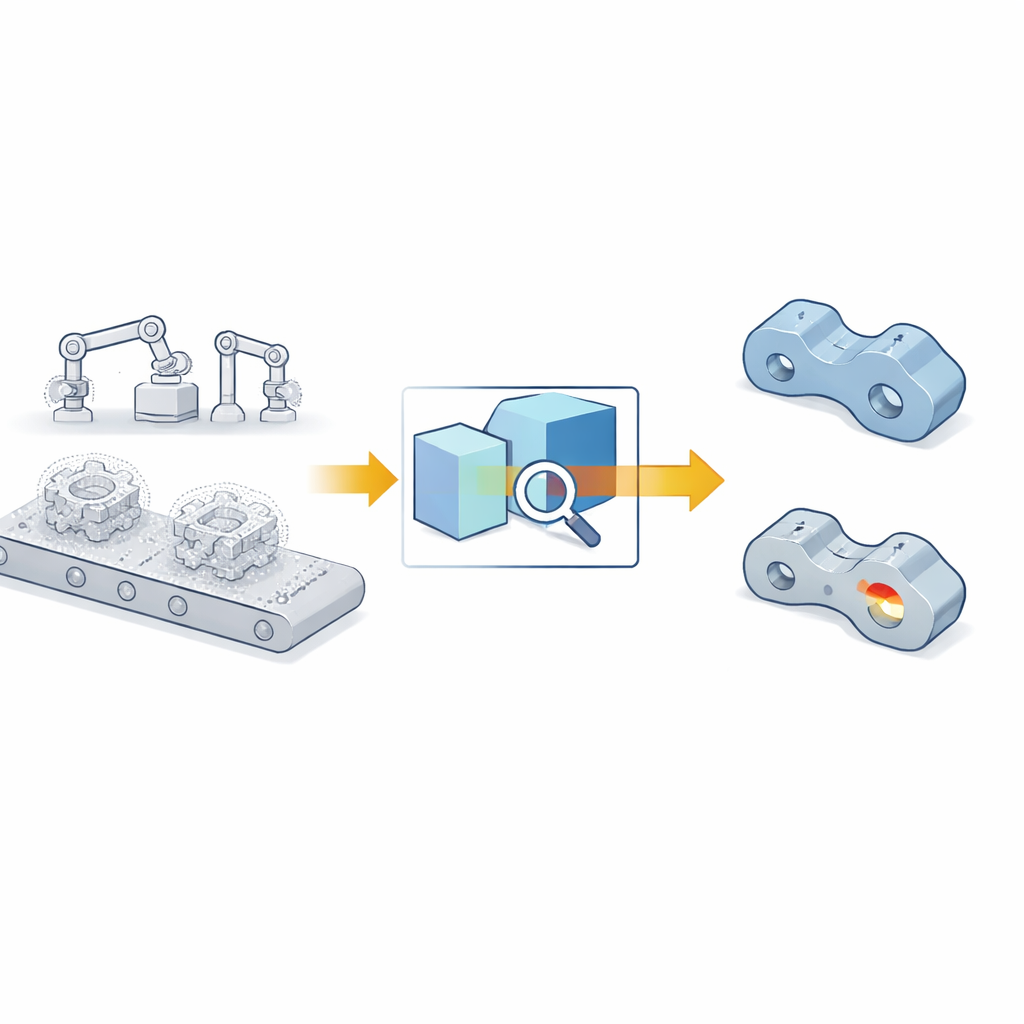
Une chaîne d'inspection rationalisée en quatre étapes
Les auteurs proposent une chaîne compacte qui considère l'inspection 3D comme un passage unique et rapide des données brutes à une « carte d'anomalies » indiquant où des problèmes peuvent se cacher. D'abord, le système découpe le nuage de points en nombreux petits patchs chevauchants, chacun résumé par un jeton numérique via un encodeur de formes 3D puissant mais figé, préalablement entraîné sur une large bibliothèque de modèles génériques. Vient ensuite l'agrégation du contexte spatial : chaque patch local est mis en relation avec un petit ensemble de prototypes représentatifs qui capturent la structure globale de l'objet. En appariant soigneusement les patchs aux prototypes selon la position et la géométrie locale, la méthode peut distinguer si une bosse est une courbe inoffensive ou un renflement suspect hors de place. Un réseau d'adaptation léger ajuste ensuite ces caractéristiques pour mieux correspondre aux particularités des scans industriels, comme le bruit des capteurs et la réflectivité, sans le coût élevé de réentraîner l'encodeur entier.
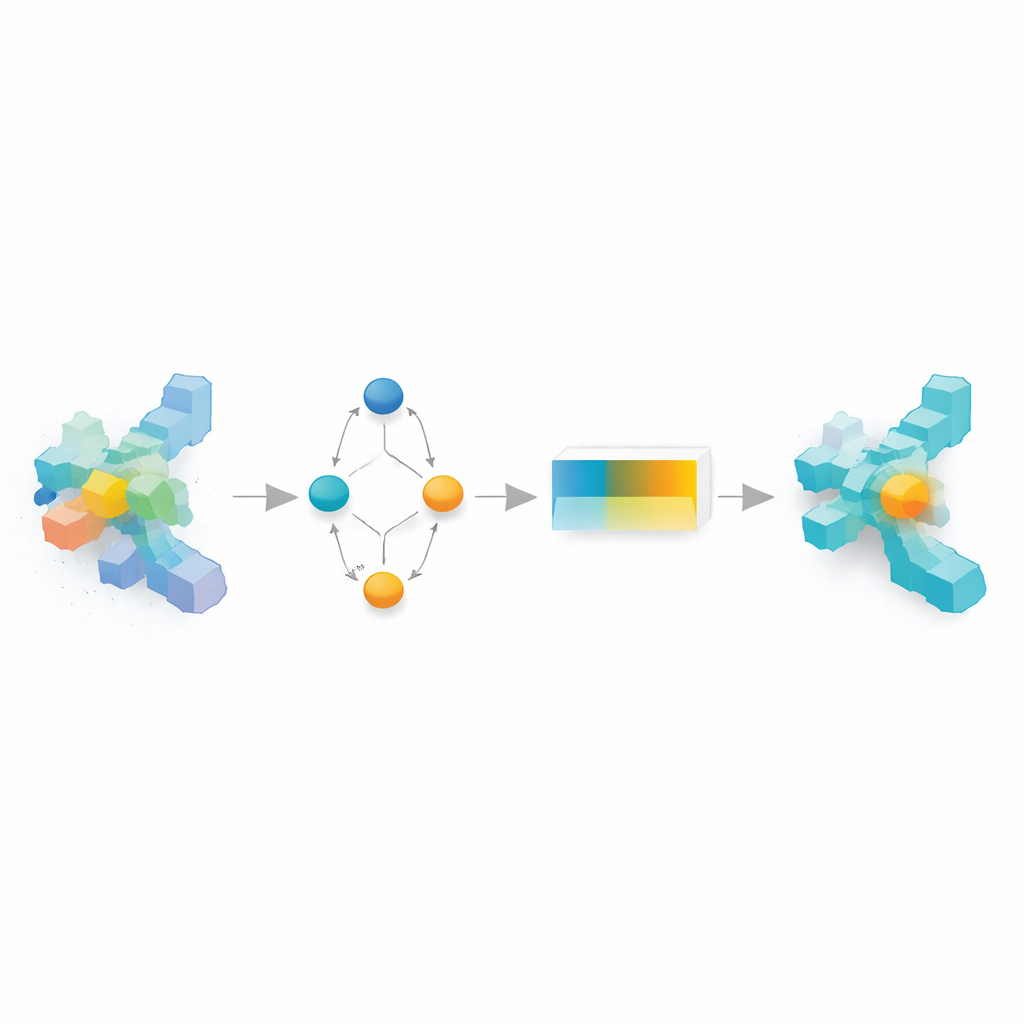
Apprendre au système à reconnaître ce qui est « mauvais »
Les ateliers réels disposent rarement de grandes collections bien étiquetées de pièces défectueuses, rendant l'entraînement supervisé peu pratique. Pour surmonter cela, la méthode invente ses propres « faux défauts » directement dans l'espace des caractéristiques. Pendant l'entraînement, elle choisit aléatoirement un sous-ensemble de jetons de patchs et les perturbe subtilement avec du bruit, en laissant les autres inchangés. Ces patchs corrompus servent d'exemples négatifs difficiles : ils sont assez proches de la normale pour être déroutants, mais suffisamment différents pour ressembler à des défauts potentiels. Un petit réseau basé sur l'attention apprend alors à distinguer les patchs propres des patchs corrompus tout en tenant compte de la manière dont chaque patch s'insère dans la forme globale. Une fois l'entraînement terminé, le générateur de bruit est désactivé, et le réseau produit un score d'anomalie pour chaque région de tout nouveau nuage de points en un seul passage avant, qui peut ensuite être projeté sur la surface sous forme de carte des défauts codée par couleur.
Évaluer l'approche
Pour mesurer l'efficacité de ce dispositif en pratique, les chercheurs l'ont évalué sur deux jeux de données exigeants. Real3D-AD contient des scans ultra-détaillés de douze classes d'objets, avec des renflements et des creux soigneusement annotés, tandis que le nouveau jeu Industrial3D-AD reflète des conditions réelles désordonnées : bruit des capteurs, vues partielles, matériaux brillants et dommages subtils comme de fines rayures et de minuscules trous. Sur les deux jeux de données, la nouvelle méthode a systématiquement dépassé une gamme de détecteurs d'anomalies 3D de pointe, non seulement pour localiser précisément les zones défectueuses mais aussi pour équilibrer défauts manqués et fausses alertes. De manière cruciale, elle l'a fait tout en fonctionnant à plus de 13 images par seconde sur une seule carte graphique moderne, rendant l'inspection continue en ligne réalisable.
Ce que cela signifie pour les produits du quotidien
Concrètement, l'étude montre qu'une utilisation plus intelligente de l'information de forme 3D peut rendre les contrôles qualité automatiques à la fois plus précis et plus rapides. En reliant chaque patch de surface locale au contexte global, en adaptant les connaissances génériques de forme aux conditions industrielles et en fabriquant des « défauts d'entraînement » réalistes, la méthode peut mettre en évidence de manière fiable les régions de surface suspectes sans nécessiter de grandes bases de données de défauts ni des calculs lourds. Pour les fabricants, cela pourrait se traduire par une détection plus précoce des micro-défauts, moins de rappels de produits et des articles plus sûrs et plus fiables pour les consommateurs.
Citation: Hoang, DC., Tan, P.X., Nguyen, AN. et al. Efficient industrial point cloud anomaly detection via spatial context aggregation and selective anomalous feature generation. Sci Rep 16, 10309 (2026). https://doi.org/10.1038/s41598-026-41255-2
Mots-clés: détection d'anomalies 3D, inspection industrielle, défauts sur nuages de points, contrôle de la qualité de surface, inspection visuelle automatisée