Clear Sky Science · ru
Метод семантической сегментации высокоразрешённых изображений дистанционного зондирования при ограниченном количестве примеров
Почему умные аэрофотоснимки важны
От отслеживания паводков до картирования новых пригородов — многие современные решения опираются на детализированные снимки, сделанные с небольших дронов. Преобразование этих снимков в чёткие карты дорог, полей, зданий и водоёмов обычно требует тысяч вручную размеченных снимков от экспертов. В этом исследовании показано, как компьютеры могут научиться создавать точные карты по снимкам с дронов, используя намного меньше размеченных примеров, что может снизить затраты и ускорить важную экологическую и городскую работу. 
Обучая компьютеры «читать» ландшафт
Снимки с дронов невероятно детализированы: видны крыши, кроны деревьев, узкие тропинки и береговые линии. Хотя эта детализация полезна, она усложняет автоматическое картографирование. Классические методы опирались на вручную разработанные правила о текстуре и цвете, которые слабо работают в таких сложных сценах. Глубокое обучение значительно повысило точность, позволяя нейросетям самостоятельно извлекать закономерности из данных. Но у этой мощности есть цена: для хорошей работы сети обычно требуют огромных размеченных наборов данных, а создание пиксельно‑точных контуров для каждого объекта в каждом изображении — медленный и дорогой процесс.
Повторное использование знаний из других снимков
Один распространённый приём — начинать с моделей, обученных на больших коллекциях фотографий, таких как ImageNet, а затем дообучать их на аэрофотоснимках. Другой — дистилляция знаний, когда сильная «учительская» модель направляет более компактную «ученическую», передавая шаблоны своих выходов. Однако повседневные фотографии сильно отличаются от снимков с воздуха по ракурсу и содержимому. Когда доступно лишь небольшое число размеченных снимков с дронов, учитель, видевший только природные фото, может давать не самую полезную подсказку, и ученик не достигнет своего потенциала.
Построение моста обучения и использование немаркированных данных
Авторы предлагают фреймворк, который одновременно решает обе проблемы: нехватку меток и несоответствие между природными фото и аэрофотоснимками. Сначала они улучшают популярную архитектуру для картографирования DeepLabV3+, заменив «спину» (backbone) на дизайн, сохраняющий тонкие детали, и добавив модуль внимания, выделяющий важные признаки. Далее они вводят промежуточный шаг между природными изображениями и целевым набором дрон‑снимков. Модель сначала настраивают на среднем по размеру датасете дистанционного зондирования, затем знание передаётся поэтапно новым ученическим моделям, которые постепенно адаптируются к финальной коллекции дрон‑кадров. На протяжении этого процесса специальные функции потерь помогают ученику копировать поведение учителя, не забывая полезные ранние знания. 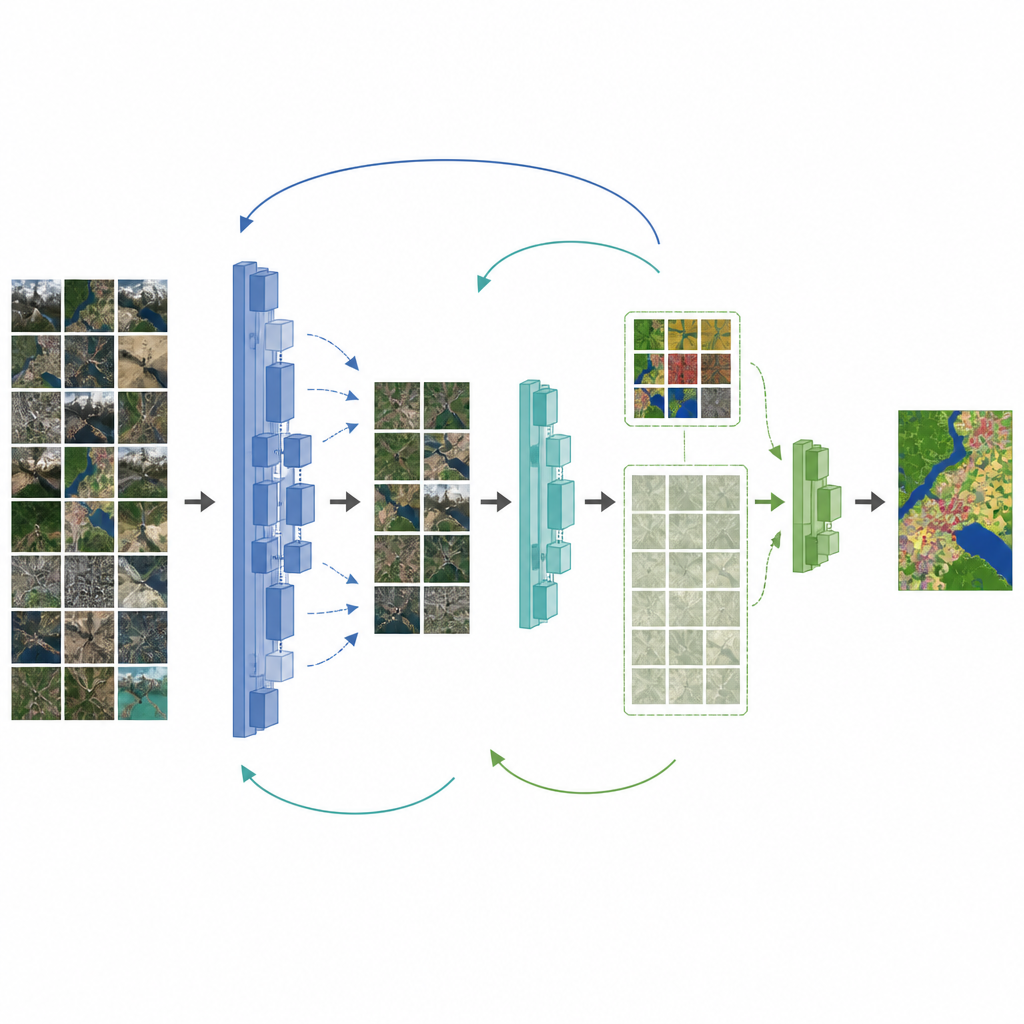
Позволяя модели учиться на немаркированных данных
Чтобы лучше использовать множество немаркированных снимков с дронов, в фреймворк добавлен этап полуподконтролируемого обучения. Здесь актуальная учительская модель автоматически маркирует немаркированные изображения и сохраняет только те предсказания, в которых она наиболее уверена. Эти «псевдо‑метки» в сочетании с небольшим набором человеческих разметок используются для обучения ученической модели, которая должна оставаться согласованной с учителем как на реальных, так и на псевдометках. Веса учителя медленно обновляются на основе прогресса ученика, создавая цикл, где обе модели улучшаются вместе. Тесты на детализированном наборе снимков дронов над регионом Эрхай в Китае показывают, что эта стратегия заметно повышает точность карт, особенно для дорог и сельхозугодий, даже когда размечена лишь часть изображений.
Насколько метод работает в разных местностях
Помимо датасета Эрхай, исследователи применили свой метод к широко используемому бенчмарку уличных сцен. Вставив подходящий промежуточный датасет, сцены которого напоминают городские улицы, они снова получили лучшую производительность по сравнению с другими ведущими методами, особенно при дефиците размеченных изображений. Эксперименты также показали, что выбор правильного промежуточного датасета критичен: если сцены на этом среднем шаге слишком отличаются от целевого, производительность может упасть вместо роста. В целом сочетание поэтапного обучения, архитектуры, сохраняющей детали, и умного использования немаркированных данных даёт гибкий рецепт, адаптирующийся к разным задачам картографирования.
Что это значит для практического картографирования
Для неспециалистов основной вывод таков: высококачественные карты по снимкам с дронов больше не требуют огромных объёмов ручной разметки. За счёт аккуратного повторного использования знаний из больших коллекций изображений, добавления хорошо подобранного промежуточного датасета и позволения модели самообучаться на немаркированных снимках предлагаемый метод даёт более точные карты покрова с существенно меньшими затратами ручного труда. Это может облегчить локальным планировщикам, фермерам и службам реагирования на чрезвычайные ситуации поддержание актуальных детализированных обзоров территории при контроле времени и расходов.
Цитирование: Jiang, HL., Wang, N., Geng, B. et al. A few-shot high-resolution remote sensing image semantic segmentation method. Sci Rep 16, 15262 (2026). https://doi.org/10.1038/s41598-026-46887-y
Ключевые слова: дистанционное зондирование, изображения БПЛА, семантическая сегментация, полуподконтролируемое обучение, дистилляция знаний