Clear Sky Science · nl
Een few-shot methode voor semantische segmentatie van hoge-resolutie remote sensing beelden
Waarom slimmer luchtopnamen ertoe doen
Van het volgen van overstromingen tot het in kaart brengen van nieuwe buitenwijken: veel moderne beslissingen zijn afhankelijk van gedetailleerde foto’s gemaakt met kleine drones. Die beelden omzetten in duidelijke kaarten van wegen, velden, gebouwen en water vereist doorgaans duizenden handmatig getekende labels door experts. Deze studie laat zien hoe computers kunnen leren nauwkeurige kaarten uit dronebeelden te maken met veel minder door mensen gelabelde voorbeelden, wat de kosten kan verlagen en essentieel milieu- en stedelijk werk kan versnellen. 
Computers leren het landschap ‘lezen’
Dronebeelden zijn buitengewoon scherp en tonen dakbedekkingen, boomkronen, smalle paden en oeverranden. Hoewel die details waardevol zijn, maken ze automatische kartografie ook moeilijk. Klassieke methoden vertrouwden op handgemaakte regels over textuur en kleur, die het in zulke complexe scènes vaak afleggen. Deep learning heeft de nauwkeurigheid sterk verhoogd doordat neurale netwerken patronen rechtstreeks uit data kunnen leren. Maar die kracht heeft een prijs: om goed te werken hebben deze netwerken meestal enorme gelabelde datasets nodig, en pixel-perfecte omtrekken tekenen voor elk object in elke afbeelding is traag en duur.
Kennis hergebruiken uit andere beelden
Een veelgebruikte verkorting is beginnen met modellen die zijn getraind op gigantische fotocollecties zoals ImageNet en die vervolgens fijn afstellen op dronebeelden. Een andere is knowledge distillation, waarbij een sterke “teacher”-model een kleinere “student” begeleidt door zijn uitvoerpatronen te delen. Echter, alledaagse foto’s verschillen sterk van luchtopnamen, zowel qua gezichtspunt als qua inhoud. Als slechts een klein aantal gelabelde dronebeelden beschikbaar is, kan een teacher die alleen natuurlijke foto’s heeft gezien niet de meest nuttige begeleiding geven, en kan de student zijn potentieel missen.
Een leerviaduct bouwen en niet-gelabelde data gebruiken
De auteurs stellen een raamwerk voor dat beide problemen tegelijk aanpakt: het gebrek aan labels en de mismatch tussen natuurlijke foto’s en dronebeelden. Eerst verbeteren ze een populair segmentatienetwerk, DeepLabV3+, door een backbone te gebruiken die fijne details behoudt en een aandachtmodule toe te voegen die belangrijke kenmerken benadrukt. Vervolgens introduceren ze een tussenstap tussen natuurlijke beelden en de uiteindelijke drone-dataset. Het model wordt eerst afgestemd op een middelgrote remote sensing-dataset, daarna wordt die kennis in fasen doorgegeven aan nieuwe studentmodellen die zich geleidelijk aanpassen aan de eindelijke dronecollectie. Gedurende dit proces helpen speciale verliesfuncties de student het gedrag van de teacher te kopiëren zonder nuttige eerdere lessen te vergeten. 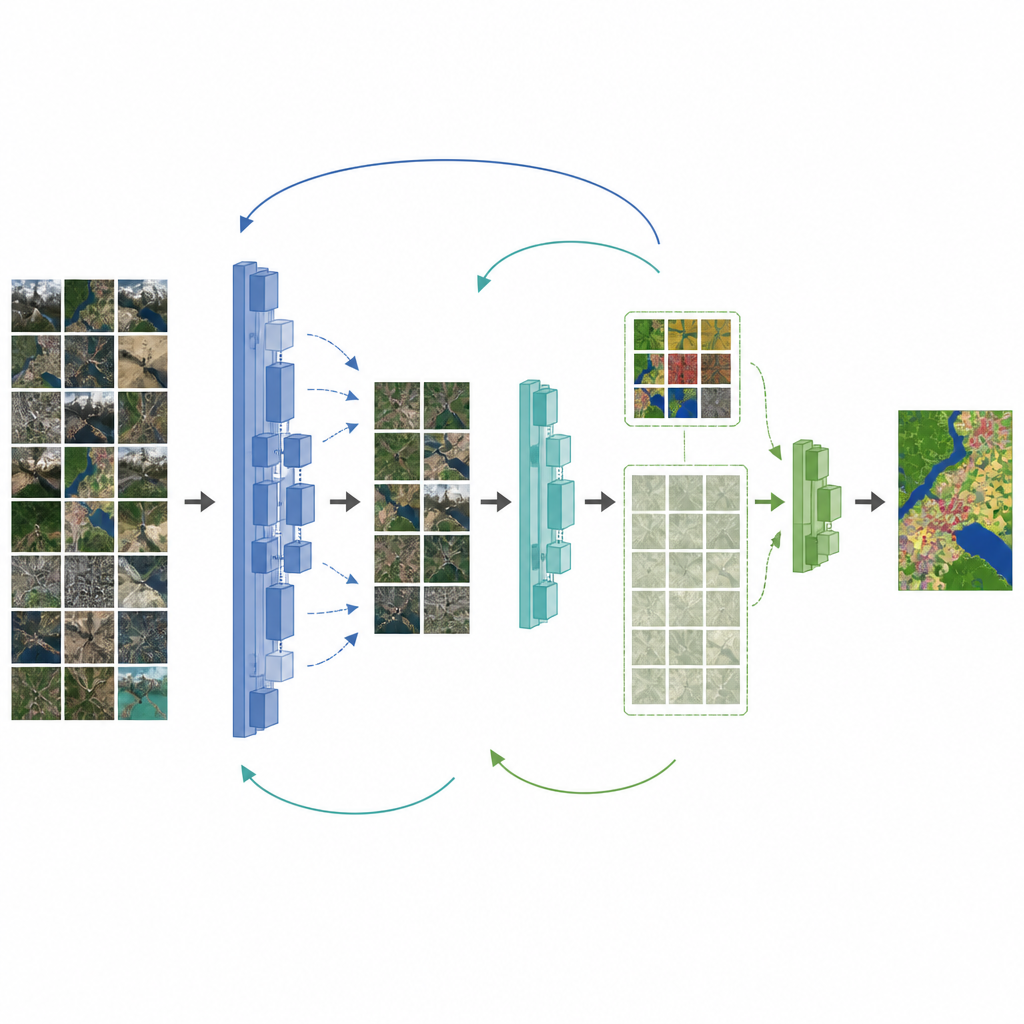
Het model laten leren van wat niet gelabeld is
Om beter gebruik te maken van de vele niet-gelabelde dronefoto’s voegt het raamwerk een semi-gesuperviseerde fase toe. Hier labelt een up-to-date teacher-model zelfstandig niet-gelabelde beelden en behoudt alleen de voorspellingen waar het het meest zeker van is. Deze “pseudo-labels”, gecombineerd met de kleine set menselijke labels, worden gebruikt om een studentmodel te trainen dat consistent moet blijven met de teacher op zowel echte als pseudo-geëtiketteerde data. De gewichten van de teacher worden langzaam bijgewerkt op basis van de voortgang van de student, waardoor een lus ontstaat waarin beide samen verbeteren. Tests op een gedetailleerde drone-dataset over China’s Erhai-regio tonen dat deze strategie de kaartnauwkeurigheid aanzienlijk verhoogt, vooral voor wegen en landbouwgrond, zelfs wanneer slechts een fractie van de beelden gelabeld is.
Hoe goed de aanpak werkt op verschillende locaties
Buiten de Erhai-dataset passen de onderzoekers hun methode toe op een veelgebruikt benchmark voor straatbeelden. Door een geschikt tussenliggend dataset in te brengen waarvan de scènes lijken op stadsstraten, zien ze opnieuw betere resultaten dan andere toonaangevende methoden, met name wanneer gelabelde beelden schaars zijn. Experimenten tonen ook aan dat de keuze van het juiste tussenliggende dataset cruciaal is: als de scènes in deze middenstap te verschillend zijn van het uiteindelijke doel, kan de prestatie dalen in plaats van stijgen. Over het geheel genomen biedt de combinatie van gelaagd lesgeven, detailbehoudende architectuur en slim gebruik van niet-gelabelde data een flexibele aanpak die zich aan verschillende kaartgavetaken aanpast.
Wat dit betekent voor kaarten in de praktijk
Voor niet-specialisten is de belangrijkste boodschap dat hoogwaardige kaarten uit dronebeelden niet langer enorme hoeveelheden handmatige tracering vereisen. Door zorgvuldig kennis te hergebruiken uit grote beeldverzamelingen, een goed gekozen brugdataset toe te voegen en het model zichzelf te laten leren uit niet-gelabelde foto’s, levert de voorgestelde methode nauwkeurigere landbedekkingskaarten met veel minder handmatig werk. Dit kan het voor lokale planners, boeren en rampenrespons-teams makkelijker maken om actuele, gedetailleerde zicht op het land te behouden, terwijl tijd en kosten beheersbaar blijven.
Bronvermelding: Jiang, HL., Wang, N., Geng, B. et al. A few-shot high-resolution remote sensing image semantic segmentation method. Sci Rep 16, 15262 (2026). https://doi.org/10.1038/s41598-026-46887-y
Trefwoorden: remote sensing, UAV-beelden, semantische segmentatie, semi-gesuperviseerd leren, knowledge distillation