Clear Sky Science · zh
使用曲面传感器提高三维成像精度:基于仿真的方法
为日常三维扫描带来更清晰的数字视觉
从手机上的人脸识别到工厂机器人检查汽车零件尺寸,许多系统现在依赖能够测量现实物体三维形状的相机。然而,大多数三维扫描仪内的相机仍沿用一个百年前的思路:在镜头后放置一个平面电子传感器。本文探讨一个看似简单的变革——将传感器弯成温和的曲面——并通过详尽的计算机仿真表明,这可以在不增加昂贵或笨重光学件的情况下,使三维测量显著更清晰、更可靠。
为何平面“眼睛”难以看清
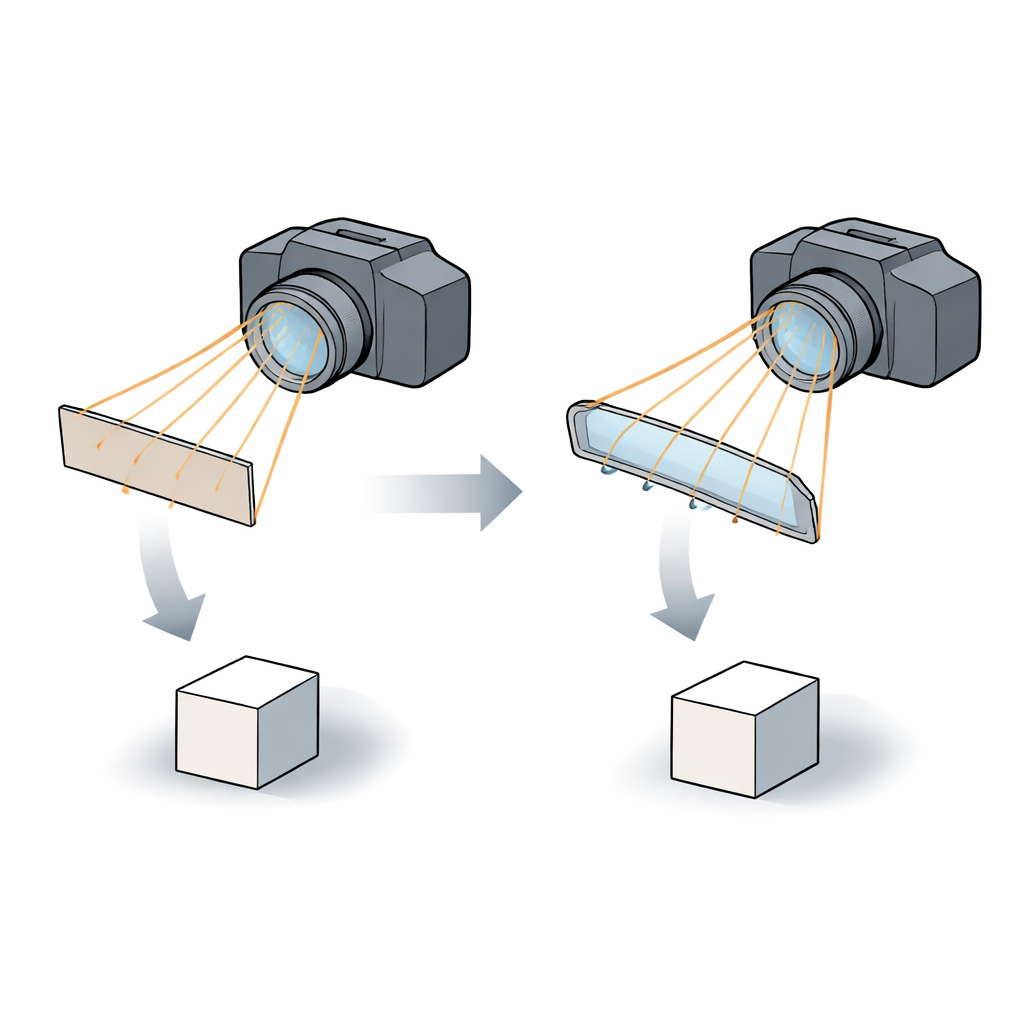
在典型的相机或三维扫描仪中,自物体反射的光通过镜头落在由数百万微小像素排列成的平面传感器上。问题在于,镜头天然将光聚焦到一个曲面上,而非平面。在图像中心,这种不匹配很小,因此细节看起来很清晰。然而在边缘,焦点漂移会导致模糊和微妙的形状失真——当目标是以高精度测量距离或尺寸时,这种失真尤其有害。工程师可以通过堆叠多片镜片来强制将光聚到平面传感器上,但这会使系统更复杂、更重且更昂贵。
向生物眼睛借个招
人类和动物的眼睛以不同方式解决了这个问题:感光的视网膜是弯曲的,与镜头聚焦光线的方式紧密匹配。受此启发,作者们对一种将平面电子传感器替换为按镜头自然焦面形状弯曲的曲面传感器的相机系统进行了仿真。他们既考察了一个简单的三透镜配置,也考察了类似商用相机的复杂多透镜设计。在每一种情况下,他们比较了平面和曲面传感器在处理常见图像缺陷(如从图像中心向外的模糊、拉伸和细节拉丝)方面的表现。
把弯曲图像变成可用的数值
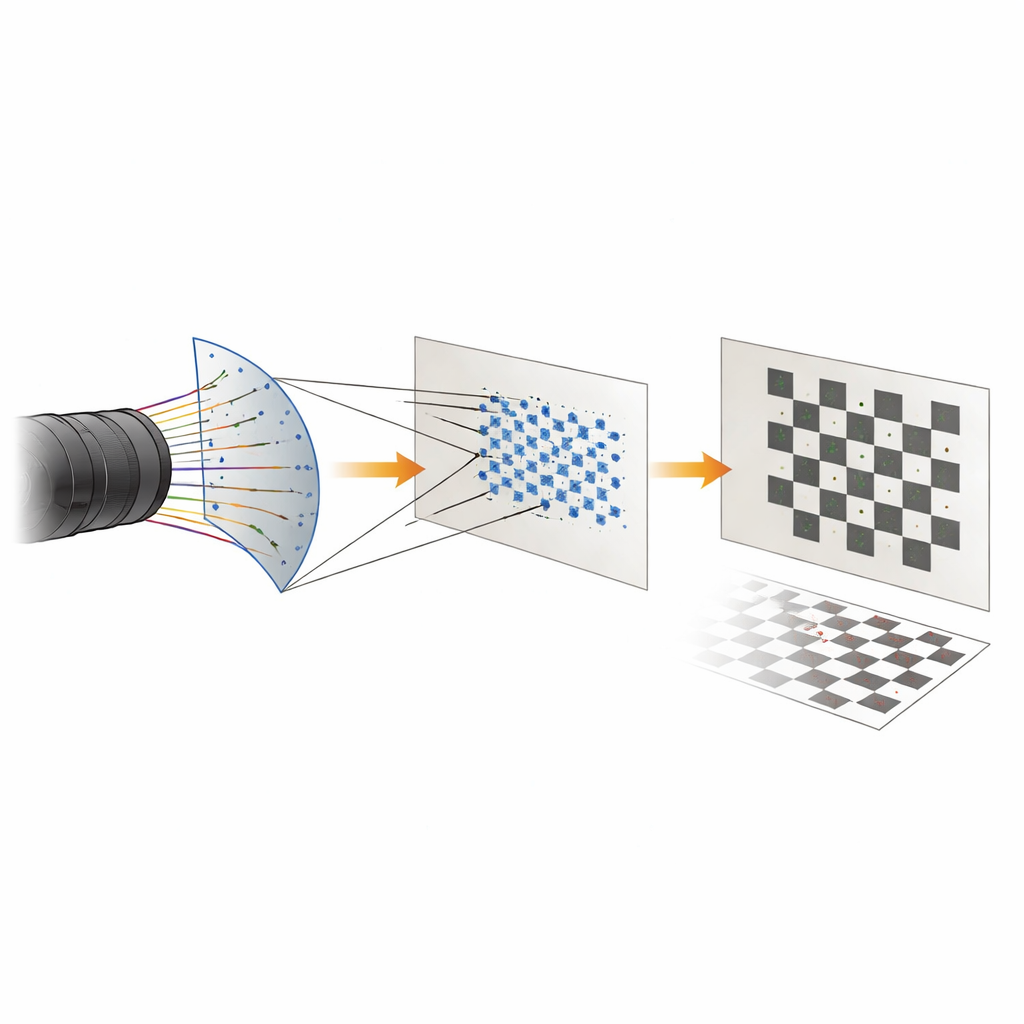
弯曲传感器带来一个新挑战:大多数用于将相机图像转换为精确三维测量的软件工具都假定传感器是平的。为了解决这个问题,研究者提出了一个数学简化方法。他们把曲面传感器视为球面的一薄片,推导出该表面上每一点如何投影回到一个假想的平面上。一旦这些点以这种方式“展开”,原本为平面传感器设计的标准相机标定方法就可以在不做重大改动的情况下复用。这种球面映射允许团队估算曲面传感器系统恢复现实世界尺寸和位置的精度。
将曲面与平面传感器放到试验中
作者们结合专用的光学设计软件与虚拟标定工具,生成了逼真的棋盘格图像,类似相机工厂中使用的标定图案。然后他们在平面和曲面传感器上运行相同的测量程序。对于平面传感器,重建该图案几何形状时的平均距离误差约为1.41%。使用曲面传感器时,这些误差降至0.78%——约减少了45%。这一改进在不同镜头设计、焦距和传感器曲率下均保持稳定,表明收益主要来自传感器形状本身,而非对光学元件的微调。
这对未来相机意味着什么
对非专业读者而言,主要结论很直接:如果我们将相机的“胶片”弯曲以契合镜头真实的聚焦方式,就能在不依赖复杂玻璃组件的情况下获得更清晰的边缘和更可靠的三维测量。尽管该研究基于仿真而非物理原型,但结果表明曲面传感器有望让未来的三维扫描仪、检测系统,甚至消费级相机更精确且可能更廉价。随着曲面电子探测器制造方法的成熟,这种以传感器为先的思路可能有助于缩小人造相机与自然界高度调谐视觉系统之间的差距。
引用: Emam, S.M., Daliri, H., Foorginejad, A. et al. Enhanced 3D imaging accuracy using curved sensors: a simulation-based approach. Sci Rep 16, 13004 (2026). https://doi.org/10.1038/s41598-026-48047-8
关键词: 3D 成像, 曲面图像传感器, 相机标定, 光学像差, 机器视觉