Clear Sky Science · nl
Verbeterde 3D-beeldnauwkeurigheid met gebogen sensoren: een simulatiegebaseerde benadering
Scherpere digitale waarneming voor alledaagse 3D-scans
Van gezichtsherkenning op telefoons tot fabrieksrobots die de afmetingen van een autoredeel controleren: veel systemen vertrouwen tegenwoordig op camera’s die de driedimensionale vorm van echte objecten kunnen meten. Toch gebruiken de camera’s in de meeste 3D-scanners nog een idee dat al een eeuw oud is: een vlakke elektronische sensor achter een lens. Dit artikel onderzoekt een schijnbaar eenvoudige wending — het buigen van die sensor in een zachte kromming — en laat met gedetailleerde computersimulaties zien dat dit 3D-metingen merkbaar scherper en betrouwbaarder kan maken zonder dure, omvangrijke optiek toe te voegen.
Waarom platte ogen moeite hebben om scherp te zien
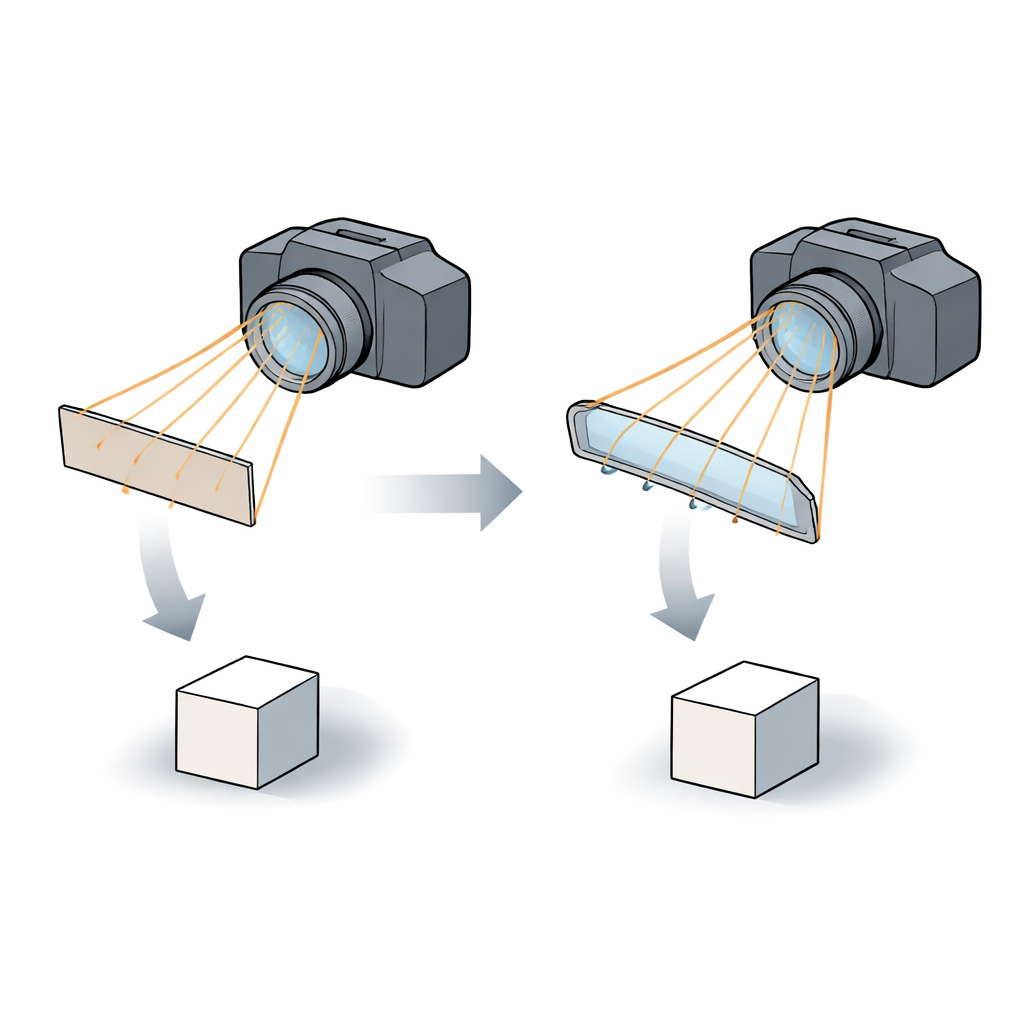
In een typische camera of 3D-scanner passeert licht dat van een object weerkaatst wordt een lens en valt op een vlakke sensor met miljoenen kleine pixels. Het probleem is dat lenzen van nature licht op een gekromd oppervlak focussen, niet op een vlak oppervlak. In het midden van het beeld is die mismatch klein, waardoor details scherp lijken. Naar de randen toe verschuift de focus echter, wat onscherpte en subtiele vormvervorming veroorzaakt die vooral schadelijk is wanneer het doel is om afstanden of afmetingen met hoge precisie te meten. Ingenieurs kunnen dit tegengaan door meerdere lenzen te stapelen om het licht op een vlakke sensor te dwingen, maar dat maakt het systeem complexer, zwaarder en duurder.
Een truc lenen van levende ogen
Mensen- en dierenogen lossen het probleem anders op: het lichtgevoelige netvlies is gekromd en sluit goed aan bij de manier waarop de lens licht focust. Geïnspireerd door dit idee simuleerden de auteurs camerasystemen waarbij de platte elektronische sensor wordt vervangen door een gebogen sensor die de natuurlijke brandvlakvorm van de lens volgt. Ze onderzochten zowel een eenvoudige opstelling met drie lenzen als een complexer multi‑lensontwerp vergelijkbaar met dat in commerciële camera’s. In elk geval vergeleken ze hoe goed platte en gebogen sensoren omgingen met veelvoorkomende beeldonvolkomenheden zoals vervaging, uitrekking en het uitlopen van details vanaf het beeldcentrum.
Een gebogen afbeelding omzetten naar bruikbare getallen
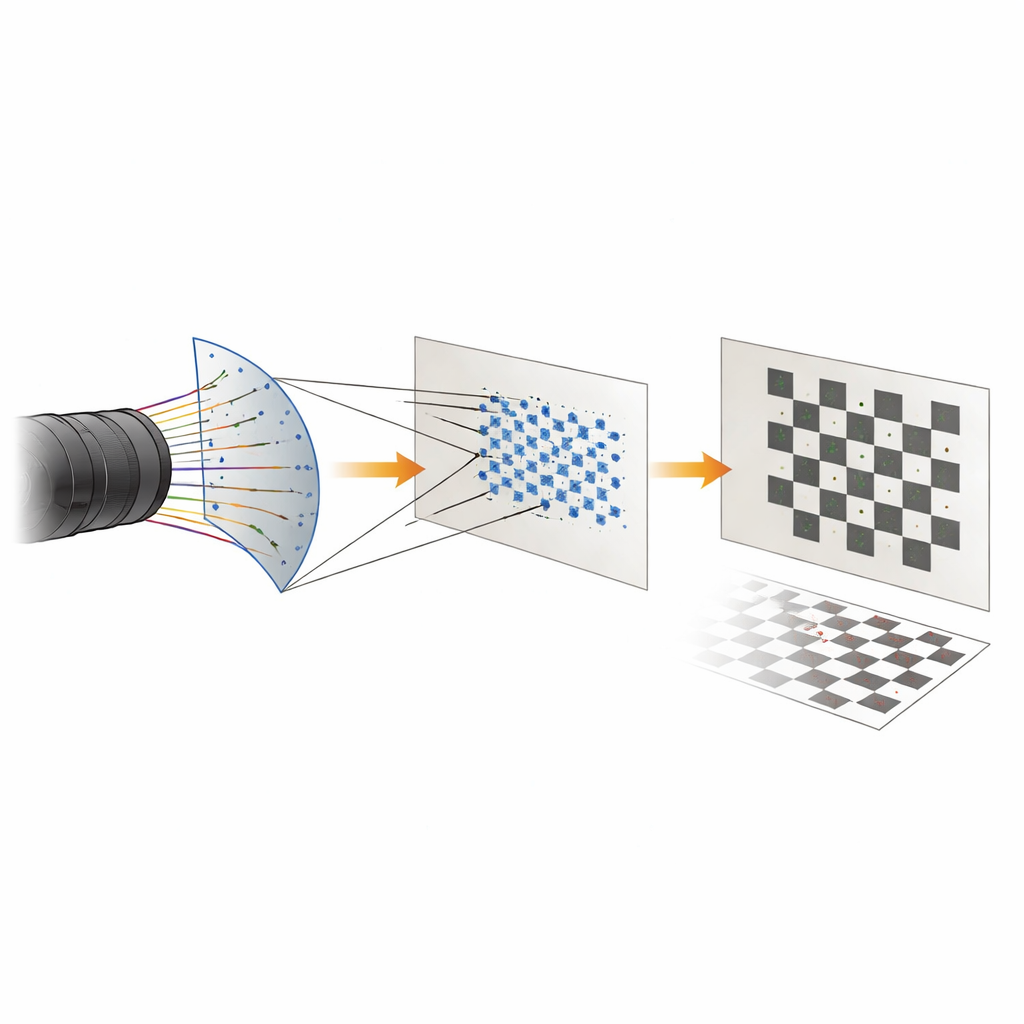
Het buigen van de sensor introduceert een nieuwe uitdaging: de meeste softwaretools die camerabeelden omzetten naar precieze 3D‑metingen gaan ervan uit dat de sensor vlak is. Om dit aan te pakken bedachten de onderzoekers een wiskundige snelweg. Ze behandelen de gebogen sensor als een dun deel van een bol en berekenen hoe elk punt op dat oppervlak terug zou projecteren op een denkbeeldig vlak. Zodra die punten op deze manier zijn "uitgevouwen", kunnen standaard camera‑kalibratiemethoden — oorspronkelijk ontworpen voor vlakke sensoren — opnieuw worden gebruikt zonder ingrijpende aanpassingen. Deze sferische mapping stelt het team in staat te schatten hoe nauwkeurig het gebogen‑sensorsysteem echte afmetingen en posities kan terugwinnen.
Gebogen en platte sensoren op de proef gesteld
Met een combinatie van gespecialiseerde optisch‑ontwerpsoftware en een virtuele kalibratietool genereerden de auteurs realistische beelden van een schaakbordpatroon, vergelijkbaar met dat in camerafabrieken wordt gebruikt. Vervolgens voerden ze dezelfde meetprocedure uit op zowel platte als gebogen sensoren. Voor de platte sensor waren de gemiddelde afstandsfouten bij het reconstrueren van de geometrie van het patroon ongeveer 1,41 procent. Met de gebogen sensor daalden die fouten naar 0,78 procent — een reductie van ongeveer 45 procent. De verbetering bleef overeind bij verschillende lensontwerpen, brandpuntsafstanden en sensorkrommingen, wat suggereert dat het voordeel hoofdzakelijk van de sensorvorm komt in plaats van van fijnslijpen van de optiek.
Wat dit betekent voor toekomstige camera’s
Voor niet‑specialisten is de hoofdboodschap eenvoudig: als we de "film" van de camera buigen zodat die aansluit op de manier waarop lenzen echt licht focussen, kunnen we scherpere randen en betrouwbaardere 3D‑metingen krijgen zonder te grijpen naar complexe glasconstructies. Hoewel de studie gebaseerd is op simulatie en niet op fysieke prototypes, geeft ze aan dat gebogen sensoren toekomstige 3D‑scanners, inspectiesystemen en mogelijk zelfs consumentencamera’s zowel nauwkeuriger als potentiëel goedkoper kunnen maken. Naarmate de productiemethoden voor gebogen elektronische detectoren rijpen, kan deze sensor‑eerstbenadering helpen de kloof te dichten tussen door mensen gemaakte camera’s en de fijn afgestemde kijksystemen die in de natuur voorkomen.
Bronvermelding: Emam, S.M., Daliri, H., Foorginejad, A. et al. Enhanced 3D imaging accuracy using curved sensors: a simulation-based approach. Sci Rep 16, 13004 (2026). https://doi.org/10.1038/s41598-026-48047-8
Trefwoorden: 3D-beeldvorming, gebogen beeldsensor, camera‑kalibratie, optische aberratie, machinale visie