Clear Sky Science · sv
Förbättrad noggrannhet i 3D-avbildning med kurvade sensorer: en simuleringsbaserad metod
Skarpare digital syn för vardaglig 3D-skanning
Från ansiktsigenkänning i mobiltelefoner till fabriksrobotar som kontrollerar storleken på en bildelsdetalj, förlitar sig många system i dag på kameror som kan mäta tredimensionella former av verkliga föremål. Ändå bygger sensorerna i de flesta 3D-skannrar fortfarande på en hundraårig idé: en platt elektronisk sensor placerad bakom ett objektiv. Den här artikeln undersöker en bedrägligt enkel vändning — att böja sensorn till en mjuk kurva — och visar genom detaljerade datorsimuleringar att det kan göra 3D-mätningar tydligt skarpare och mer tillförlitliga utan att lägga till dyra, klumpiga optiska element.
Varför platta ögon har svårt att se skarpt
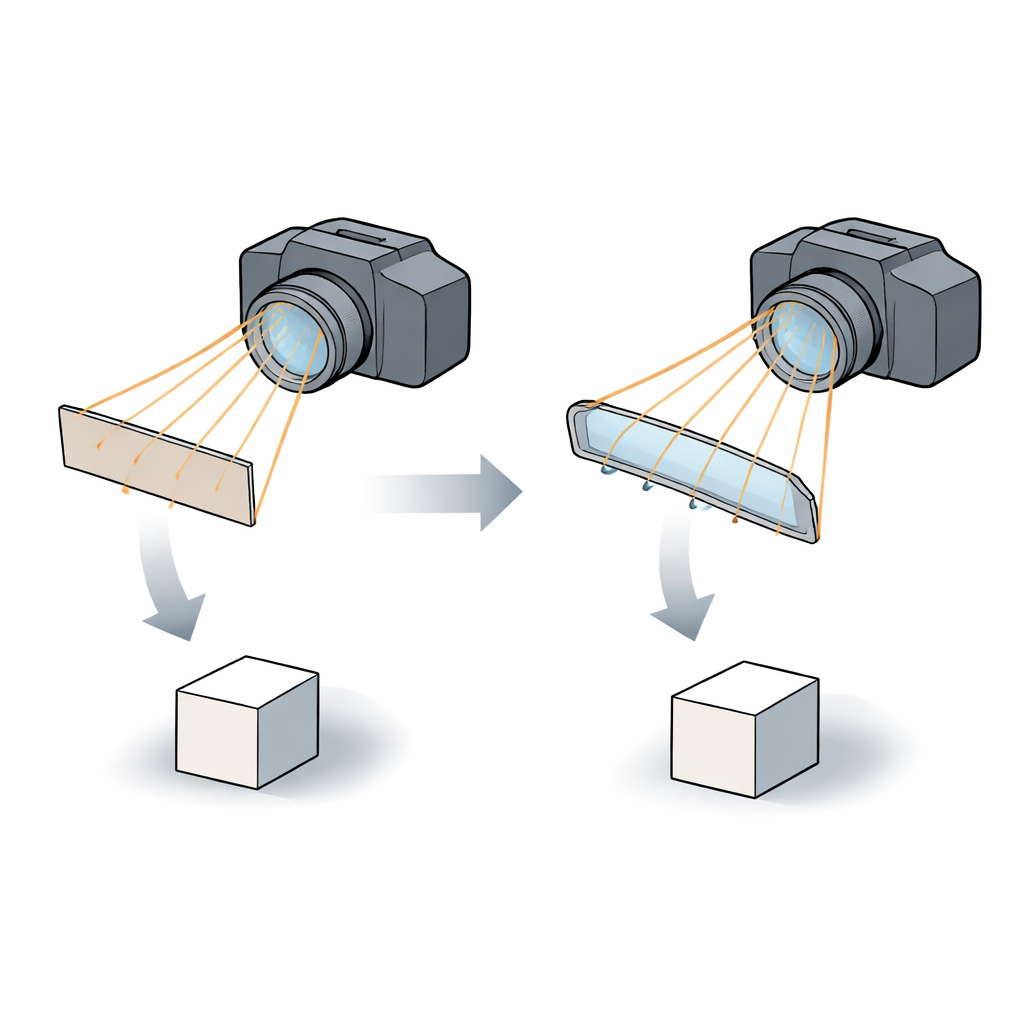
I en typisk kamera eller 3D-skanner passerar ljus som reflekteras från ett objekt genom ett objektiv och träffar en platt sensor täckt av miljontals små pixlar. Problemet är att linser naturligt fokuserar ljuset på en krökt yta, inte på en platt. I bildens centrum är denna missanpassning liten, så detaljer ser skarpa ut. Mot kanterna, däremot, förskjuts fokus, vilket orsakar oskärpa och subtila formförvrängningar som är särskilt skadliga när målet är att mäta avstånd eller dimensioner med hög precision. Ingenjörer kan motverka detta genom att stapla flera linser för att tvinga ljuset att falla på en platt sensor, men det gör systemet mer komplext, tyngre och dyrare.
Att låna ett knep från levande ögon
Mänskliga och djurögon löser problemet på ett annat sätt: den ljuskänsliga retinan är krökt och matchar väl hur linsen fokuserar ljuset. Inspirerade av detta simulerade författarna kamerasystem där den platta elektroniska sensorn ersätts av en kurvad sensor formad för att följa objektivets naturliga fokalyta. De undersökte både en enkel tre-linsuppställning och en mer komplex månglinskonstruktion liknande dem som finns i kommersiella kameror. I varje fall jämförde de hur väl platta respektive kurvade sensorer hanterade vanliga bildimperfektioner som oskärpa, utsträckning och utstrålning av detaljering bort från bildens centrum.
Att förvandla en kurvad bild till användbara siffror
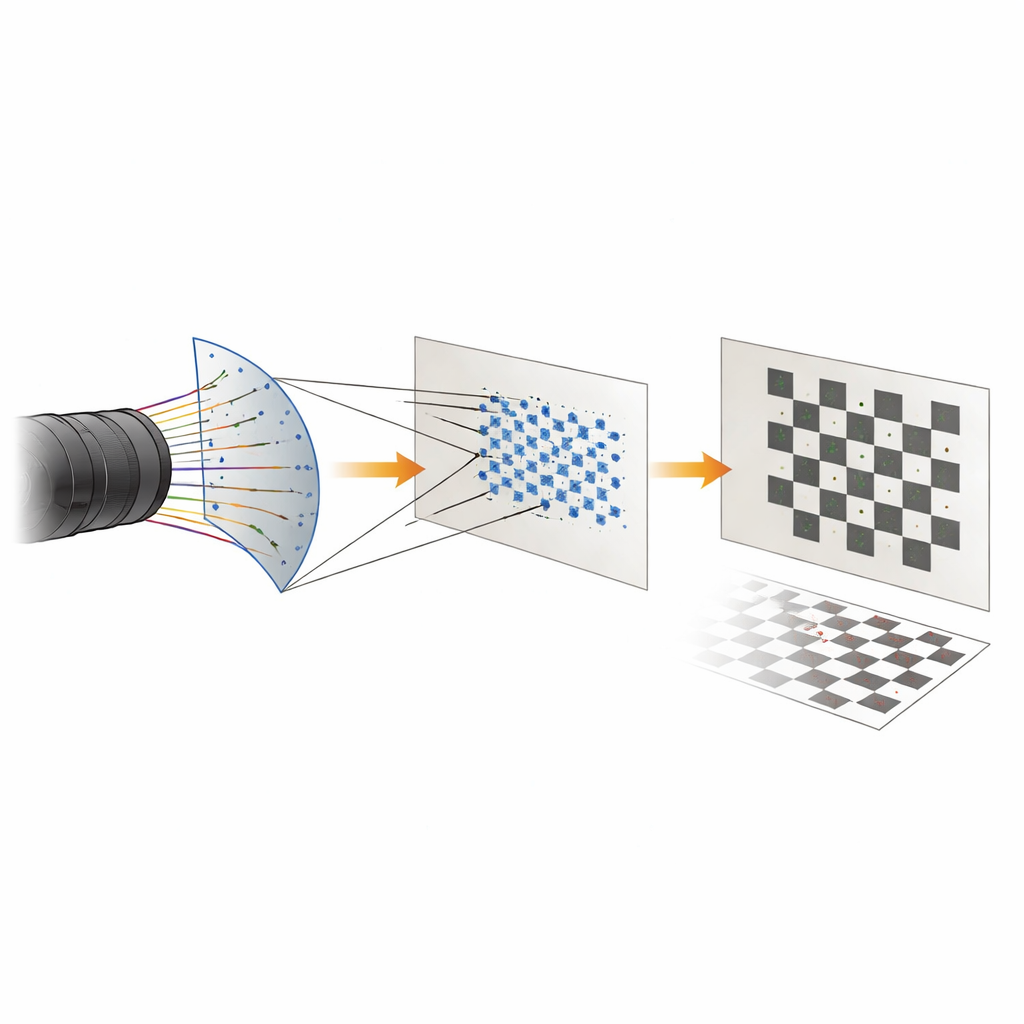
Att kurva sensorn medför en ny utmaning: de flesta programvaruverktyg som används för att omvandla kamerabilder till precisa 3D-mätningar antar att sensorn är platt. För att hantera detta utvecklade forskarna ett matematiskt genväg. De behandlar den kurvade sensorn som en tunn skiva av en sfär och beräknar hur varje punkt på den ytan skulle projiceras tillbaka på ett imaginärt plant plan. När dessa punkter har ”upplyfts” på detta sätt kan standardmetoder för kamerakalibrering — ursprungligen utformade för platta sensorer — återanvändas utan större förändringar. Denna sfäriska avbildning gör det möjligt för teamet att uppskatta hur noggrant systemet med kurvad sensor kan återskapa verkliga storlekar och positioner.
Att testa kurvade och platta sensorer
Med en kombination av specialiserad optisk designprogramvara och ett virtuellt kalibreringsverktyg genererade författarna realistiska bilder av ett schackrutemönster, liknande dem som används i kamerafabriker. De körde sedan samma mätprocedur på både platta och kurvade sensorer. För den platta sensorn var de genomsnittliga avståndsfelen vid återuppbyggnad av mönstrets geometri cirka 1,41 procent. Med den kurvade sensorn sjönk dessa fel till 0,78 procent — en reduktion på ungefär 45 procent. Förbättringen höll i sig över olika objektivdesigner, brännvidder och sensorvridningar, vilket tyder på att nyttan huvudsakligen kommer från sensorformen snarare än från finslipning av optiken.
Vad det innebär för framtidens kameror
För en icke-specialist är huvudbudskapet enkelt: om vi böjer kamerans ”film” så att den passar hur objektiv verkligen fokuserar ljus, kan vi få skarpare kanter och mer pålitliga 3D-mätningar utan att tillgripa komplicerade glasarrangemang. Även om studien bygger på simuleringar snarare än fysiska prototyper visar den att kurvade sensorer kan göra framtida 3D-skannrar, inspektionssystem och kanske även konsumentkameror både mer precisa och potentiellt billigare. I takt med att tillverkningsmetoder för kurvade elektroniska detektorer mognar kan detta sensorförst-tänk hjälpa till att minska gapet mellan människotillverkade kameror och de finjusterade synsystem som finns i naturen.
Citering: Emam, S.M., Daliri, H., Foorginejad, A. et al. Enhanced 3D imaging accuracy using curved sensors: a simulation-based approach. Sci Rep 16, 13004 (2026). https://doi.org/10.1038/s41598-026-48047-8
Nyckelord: 3D-avbildning, kurvad bildsensor, kamerakalibrering, optisk aberration, maskinsyn