Clear Sky Science · es
Mayor precisión en imágenes 3D mediante sensores curvos: un enfoque basado en simulaciones
Visión digital más nítida para el escaneo 3D cotidiano
Desde el reconocimiento facial en teléfonos hasta los robots de fábrica que verifican el tamaño de una pieza de automóvil, muchos sistemas dependen hoy de cámaras capaces de medir la forma tridimensional de objetos reales. Sin embargo, las cámaras dentro de la mayoría de los escáneres 3D siguen recurriendo a una idea centenaria: un sensor electrónico plano colocado detrás de una lente. Este artículo explora un giro aparentemente simple—curvar ese sensor en una suave curvatura—y muestra, mediante detalladas simulaciones por ordenador, que puede hacer que las mediciones 3D sean notablemente más nítidas y fiables sin añadir ópticas costosas o voluminosas.
Por qué los “ojos” planos tienen dificultades para ver con claridad
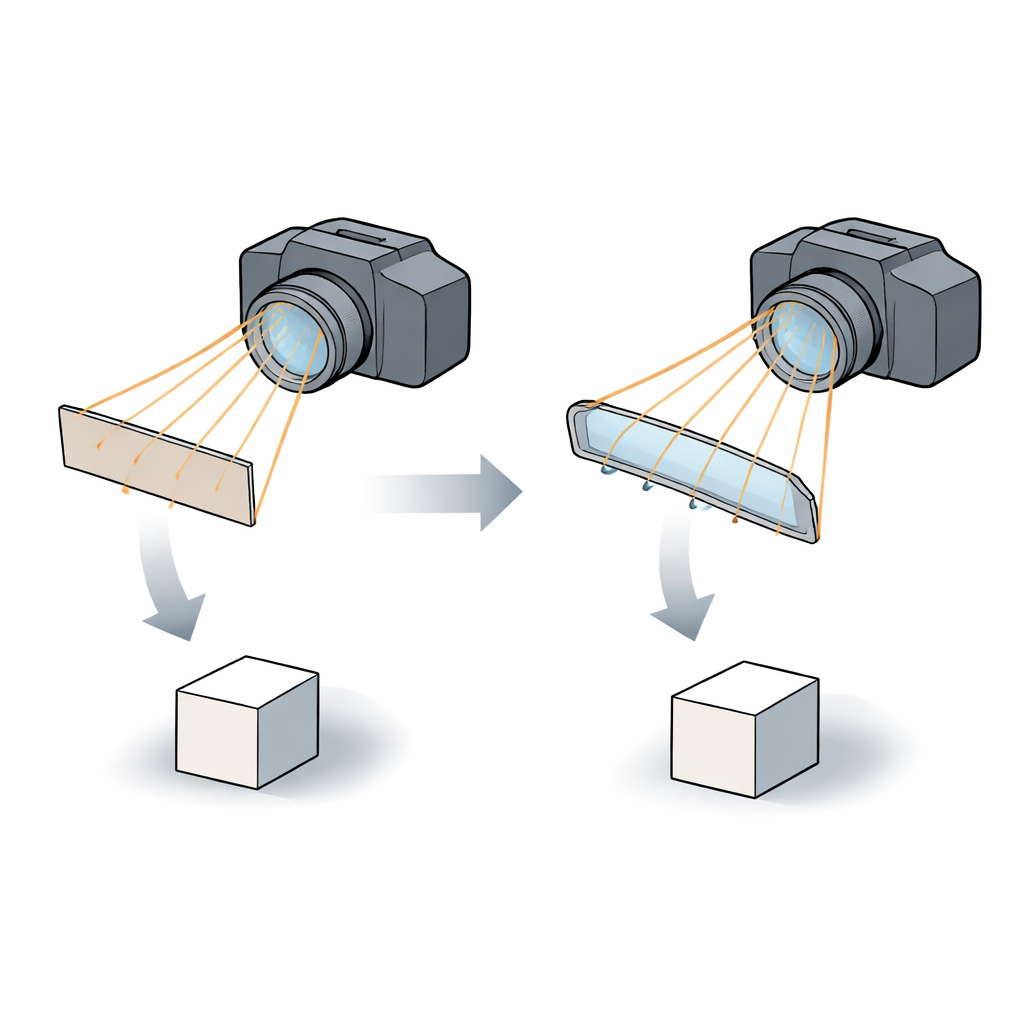
En una cámara o un escáner 3D típico, la luz reflejada por un objeto pasa a través de una lente y llega a un sensor plano compuesto por millones de diminutos píxeles. El problema es que las lentes tienden a enfocar la luz sobre una superficie curva, no plana. En el centro de la imagen esta discrepancia es pequeña, por lo que los detalles se ven nítidos. Hacia los bordes, sin embargo, el foco deriva, provocando desenfoque y sutiles distorsiones de la forma que resultan especialmente dañinas cuando el objetivo es medir distancias o dimensiones con alta precisión. Los ingenieros pueden combatir esto apilando múltiples lentes para forzar la luz sobre un sensor plano, pero eso hace que el sistema sea más complejo, pesado y costoso.
Tomando prestado un truco de los ojos vivos
Los ojos humanos y animales resuelven el problema de forma diferente: la retina fotosensible es curva, coincidiendo estrechamente con la superficie focal natural de la lente. Inspirados por esto, los autores simularon sistemas de cámara en los que el sensor electrónico plano se sustituye por uno curvo, diseñado para seguir la superficie focal natural de la lente. Examinaron tanto una configuración simple de tres lentes como un diseño multicapa más complejo, similar a los encontrados en cámaras comerciales. En cada caso compararon cómo manejaban sensores planos y curvos las imperfecciones comunes de la imagen, como el desenfoque, el estiramiento y las distorsiones de los detalles alejados del centro de la imagen.
Convertir una imagen curva en números útiles
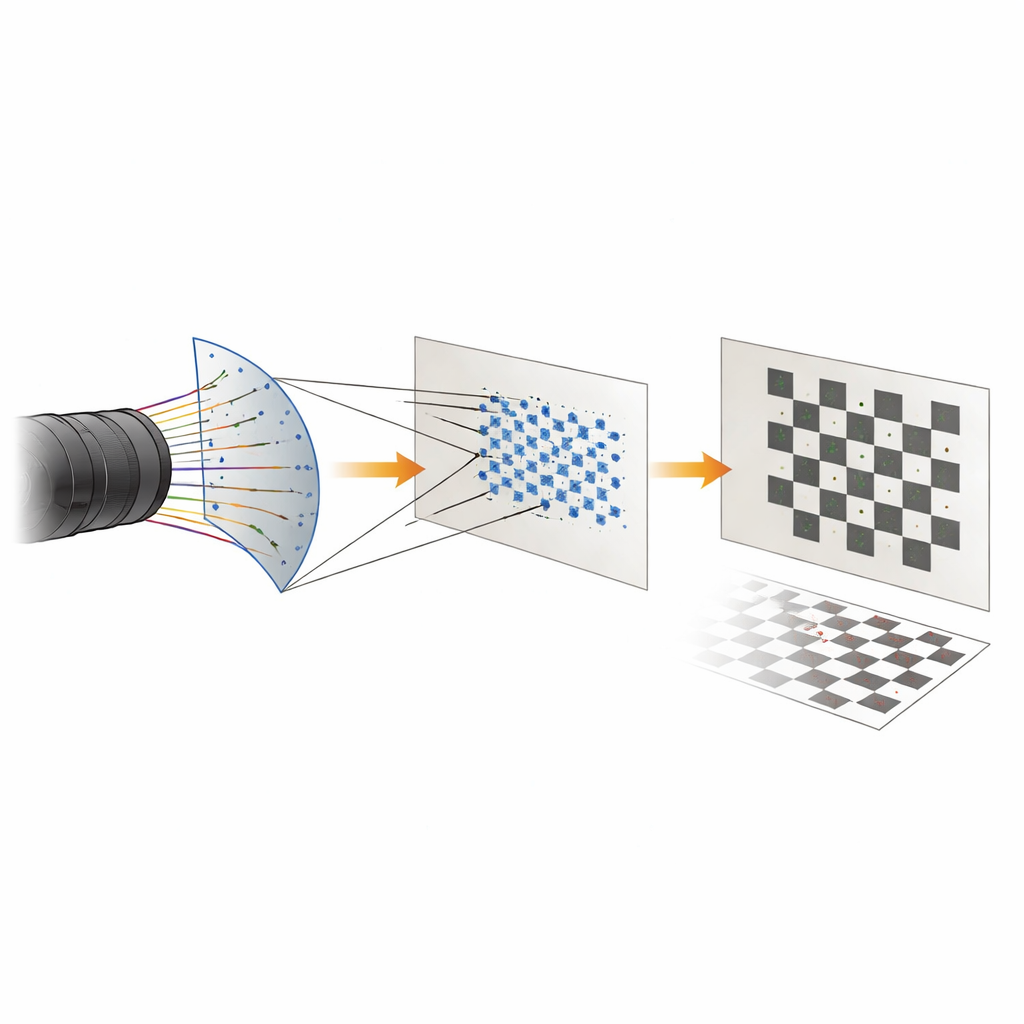
Curvar el sensor introduce un nuevo desafío: la mayoría de las herramientas de software usadas para convertir imágenes de cámara en mediciones 3D precisas asumen que el sensor es plano. Para resolverlo, los investigadores idearon un atajo matemático. Tratan al sensor curvo como una delgada porción de una esfera y calculan cómo cada punto de esa superficie se proyectaría de vuelta sobre un plano imaginario y plano. Una vez que esos puntos se “desenvuelven” de esta manera, los métodos estándar de calibración de cámara—originalmente diseñados para sensores planos—pueden reutilizarse sin grandes cambios. Este mapeo esférico permite al equipo estimar con qué precisión el sistema de sensor curvo podría recuperar tamaños y posiciones del mundo real.
Poniendo a prueba sensores curvos y planos
Usando una combinación de software especializado en diseño óptico y una herramienta virtual de calibración, los autores generaron imágenes realistas de un patrón de tablero de ajedrez, similar a los que se usan en fábricas de cámaras. Luego aplicaron el mismo procedimiento de medición tanto a sensores planos como curvos. Para el sensor plano, los errores medios de distancia al reconstruir la geometría del patrón fueron alrededor del 1,41 por ciento. Con el sensor curvo, esos errores cayeron al 0,78 por ciento, una reducción de aproximadamente el 45 por ciento. La mejora se mantuvo a través de distintos diseños de lentes, longitudes focales y curvaturas del sensor, lo que sugiere que el beneficio proviene principalmente de la forma del sensor más que de un ajuste fino de la óptica.
Qué significa esto para las cámaras del futuro
Para un público no especialista, el mensaje principal es sencillo: si curvamos la “película” de la cámara para ajustarla a la forma en que las lentes realmente enfocan la luz, podemos obtener bordes más nítidos y mediciones 3D más confiables sin recurrir a ensamblajes de vidrio complejos. Aunque el estudio se basa en simulaciones y no en prototipos físicos, indica que los sensores curvos podrían hacer que futuros escáneres 3D, sistemas de inspección y quizá incluso cámaras de consumo sean tanto más precisos como potencialmente más económicos. A medida que maduren los métodos de fabricación de detectores electrónicos curvos, este enfoque centrado en el sensor podría ayudar a cerrar la brecha entre las cámaras artificiales y los sistemas de visión finamente ajustados que existen en la naturaleza.
Cita: Emam, S.M., Daliri, H., Foorginejad, A. et al. Enhanced 3D imaging accuracy using curved sensors: a simulation-based approach. Sci Rep 16, 13004 (2026). https://doi.org/10.1038/s41598-026-48047-8
Palabras clave: imágenes 3D, sensor de imagen curvo, calibración de cámara, aberración óptica, visión artificial