Clear Sky Science · ru
Повышение точности 3D‑съёмки с помощью изогнутых датчиков: подход на основе моделирования
Более чёткое цифровое зрение для повседневного 3D‑сканирования
От распознавания лиц в смартфонах до промышленных роботов, проверяющих размеры автомобильных деталей, многие системы сегодня опираются на камеры, способные измерять трёхмерную форму реальных объектов. Тем не менее большинство 3D‑сканеров по‑прежнему используют идею столетней давности: плоский электронный датчик, расположенный за объективом. В статье исследуется на первый взгляд простая идея — изгиб этого датчика в плавную кривую — и с помощью подробных компьютерных симуляций показано, что это может сделать 3D‑измерения заметно более резкими и надёжными без добавления дорогой или громоздкой оптики.
Почему плоские «глаза» плохо видят
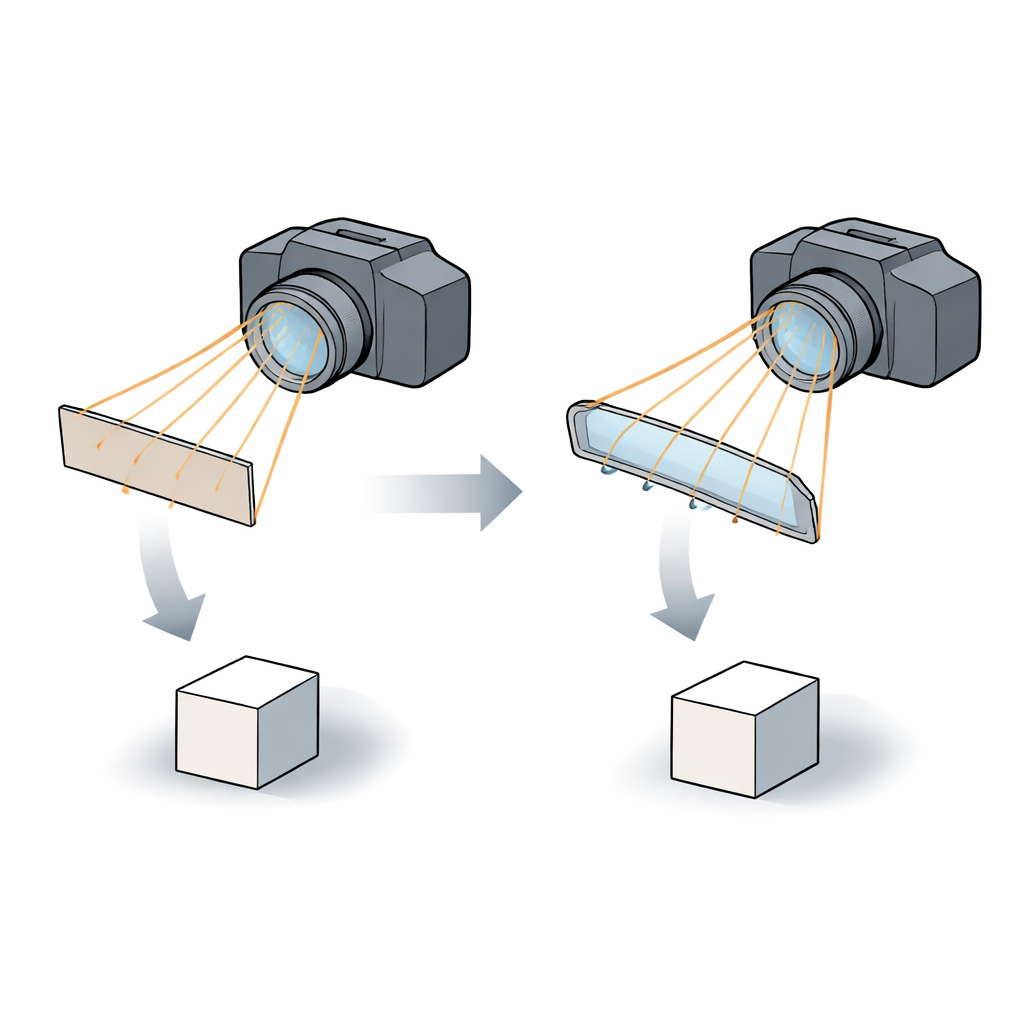
В типичной камере или 3D‑сканере свет, отражённый от объекта, проходит через объектив и падает на плоский датчик, покрытый миллионами мелких пикселей. Проблема в том, что объективы по своей природе фокусируют свет на изогнутой поверхности, а не на плоскости. В центре изображения это несоответствие невелико — детали выглядят резкими. К краям же фокус смещается, вызывая размытие и тонкие искажения формы, что особенно критично при измерении расстояний и размеров с высокой точностью. Инженеры могут бороться с этим, сочленяя множество линз, чтобы принудительно направить свет на плоский датчик, но это делает систему более сложной, тяжёлой и дорогой.
Заимствование трюка у живых глаз
Человеческие и животные глаза решают эту проблему иначе: светочувствительная сетчатка изогнута и близко соответствует тому, как объектив фокусирует свет. Вдохновлённые этим, авторы смоделировали системы камер, в которых плоский электронный датчик заменён изогнутым, повторяющим естественную фокальную поверхность объектива. Они исследовали как простую трёхлинзовую схему, так и более сложный многолинзовый дизайн, похожий на используемые в коммерческих камерах. В каждом случае сравнивалось, как плоские и изогнутые датчики справляются с типичными дефектами изображения — размытием, растяжением и смещением деталей от центра.
Преобразование изогнутого изображения в пригодные для измерений числа
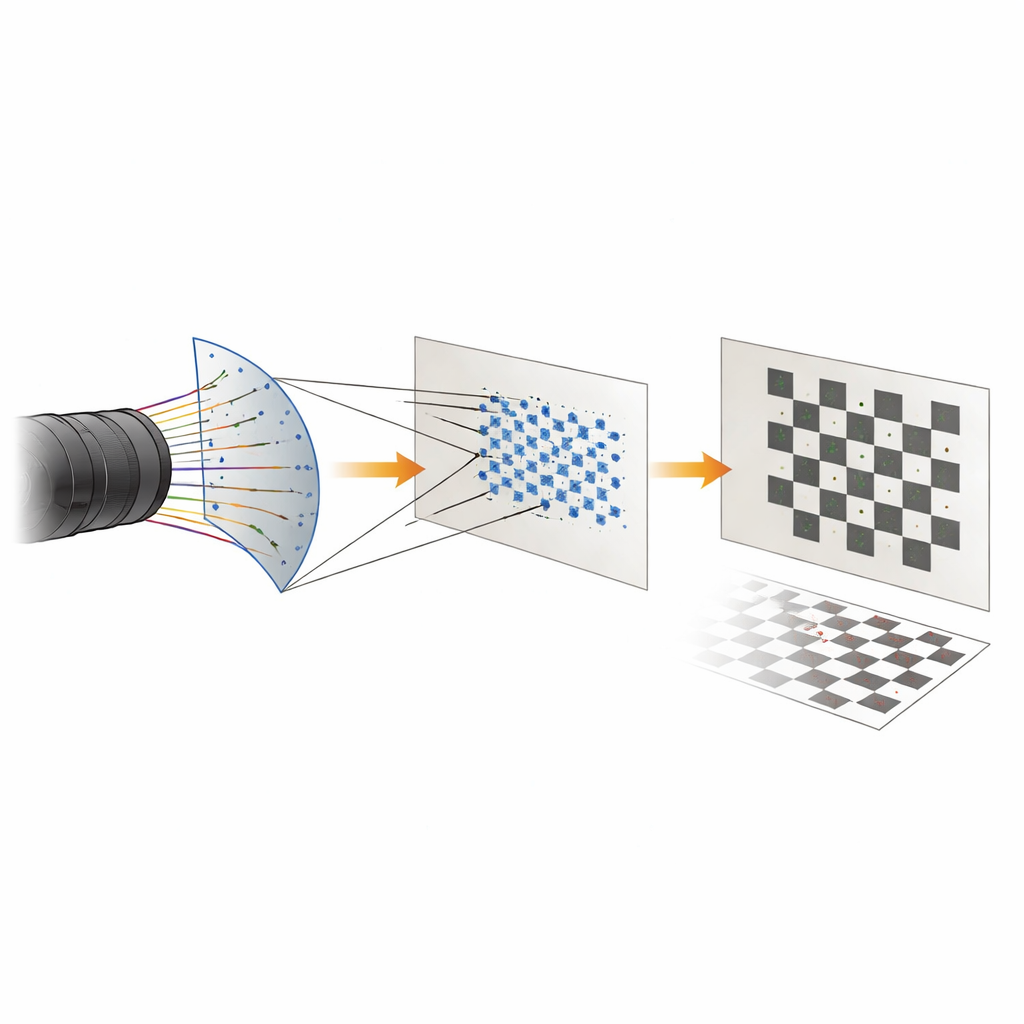
Изгиб датчика вносит новую сложность: большинство программных инструментов, используемых для преобразования изображений камер в точные 3D‑измерения, предполагают плоскую поверхность датчика. Чтобы решить эту задачу, исследователи предложили математический приём. Они рассматривают изогнутый датчик как тонкий участок сферы и выясняют, как каждая точка на этой поверхности проецировалась бы обратно на воображаемую плоскость. После такого «развёртывания» стандартные методы калибровки камер — изначально разработанные для плоских датчиков — можно применять без существенных изменений. Эта сферическая проекция позволяет оценить, насколько точно система с изогнутым датчиком сможет восстановить реальные размеры и положения объектов.
Сравнение изогнутых и плоских датчиков
С помощью сочетания специализированного ПО для оптического проектирования и виртуального инструмента калибровки авторы сгенерировали реалистичные изображения шахматной доски, подобные тем, что используют на фабриках камер. Затем они провели ту же процедуру измерения для плоских и изогнутых датчиков. Для плоского датчика средняя ошибка в восстановлении геометрии шаблона составляла примерно 1,41 процента. Для изогнутого датчика эти ошибки снизились до 0,78 процента — снижение примерно на 45 процентов. Улучшение сохранялось при различных конструкциях объективов, фокусных расстояниях и кривизне датчика, что указывает на то, что преимущество главным образом связано с формой датчика, а не с тонкой настройкой оптики.
Что это означает для будущих камер
Для неспециалиста основной вывод прост: если согнуть «плёнку» камеры так, чтобы она соответствовала тому, как объектив на самом деле фокусирует свет, можно получить более чёткие края и более надёжные 3D‑измерения без сложных линзовых сборок. Хотя исследование основано на моделировании, а не на физических прототипах, оно указывает, что изогнутые датчики могут сделать будущие 3D‑сканеры, системы инспекции и, возможно, потребительские камеры точнее и потенциально дешевле. По мере совершенствования производственных методов для изогнутых электронных детекторов такой подход, ориентированный на форму датчика, может помочь сократить разрыв между искусственными камерами и тонко настроенными системами зрения, найденными в природе.
Цитирование: Emam, S.M., Daliri, H., Foorginejad, A. et al. Enhanced 3D imaging accuracy using curved sensors: a simulation-based approach. Sci Rep 16, 13004 (2026). https://doi.org/10.1038/s41598-026-48047-8
Ключевые слова: 3D‑съёмка, изогнутый светочувствительный датчик, калибровка камеры, оптическая аберрация, машинное зрение