Clear Sky Science · zh
MFR-YOLO:通过可变形卷积与全局注意的多尺度特征精炼推进无人机目标检测
为什么更清晰的无人机视觉很重要
从交通监控到灾难搜救,越来越多的无人机成为城市与田野的“空中之眼”。然而从高空发现微小、快速移动的车辆或人员比看起来要困难得多。本研究提出了 MFR-YOLO,一种改进方法,使无人机能够实时识别大量小型且变形的目标,帮助空中系统做出更安全、更智能的决策。
从空中观察的挑战
无人机摄像头拍摄的是拥挤的街道、农田或灾区,其中大多数目标仅占据少数像素。当无人机移动时,目标尺寸和角度快速变化,建筑、树木和阴影又常与目标混合在一起。标准检测系统常常错过这些微小目标,把它们与背景混淆,或在提高精度时显著变慢。流行的 YOLO 系列检测器已经在速度与精度之间做出平衡,但其常用模块仍会丢失细节,对倾斜或拉伸的形状处理困难,并且缺乏足够强的手段来忽略复杂背景。
保持微小细节的新方法
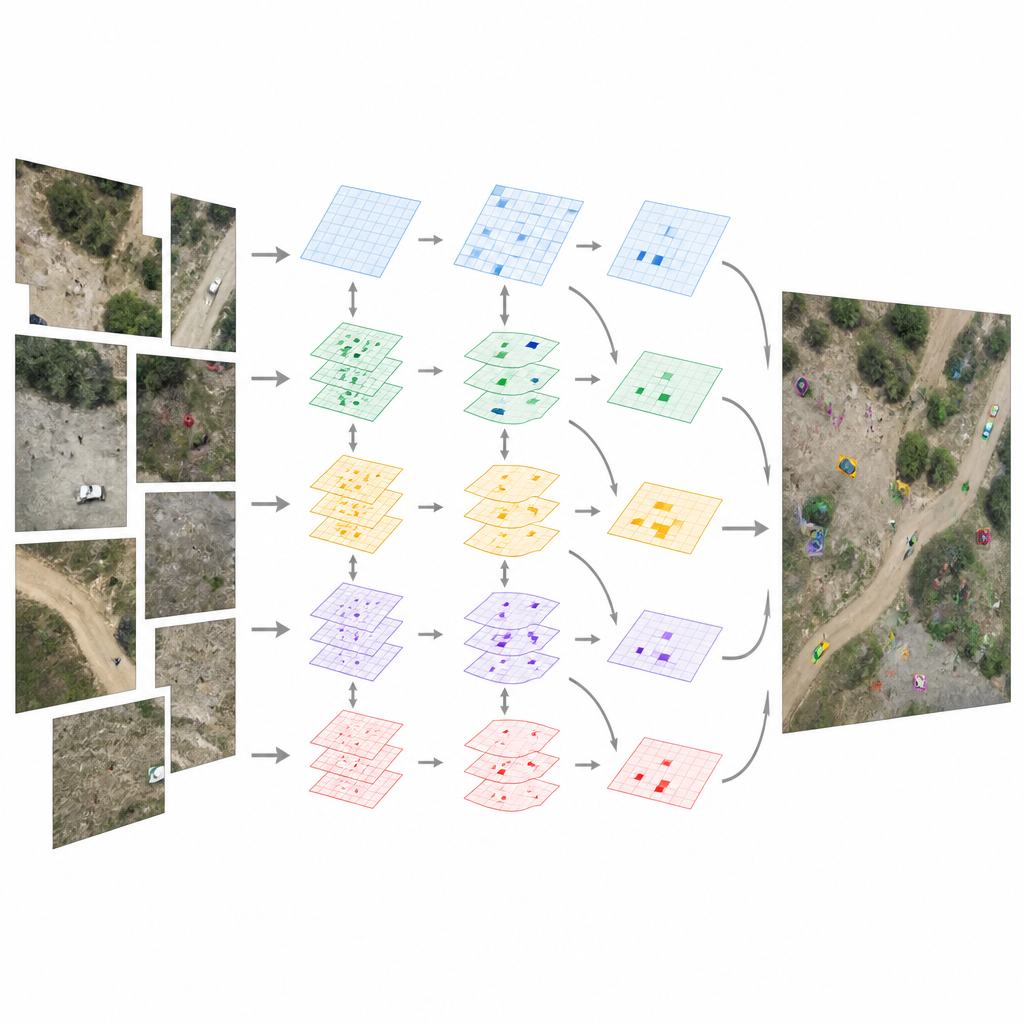
作者基于 YOLOv12 设计了 MFR-YOLO,以在保持高速的同时保护小目标细节。首先,他们加入了一个多尺度特征提取模块,沿两条并行路径工作。一条路径专注于保留清晰的边缘与纹理,确保行人、自行车与车辆在网络缩放处理时不会消失;另一条路径使用可“弯曲”的灵活滤波器,能够调整采样位置,更好地匹配因无人机视角变化而呈现旋转、拉伸或倾斜的目标。将这两条路径融合产生了更丰富的特征图,同时保留识别极小目标所需的细差信息。
教会模型关注真正重要的部分
为防止网络被天空、树木或建筑等干扰信息分散注意力,团队在特征构建与特征融合阶段都嵌入了全局注意力模块。该模块学习突出属于可能目标的区域与模式,同时抑制无关区域。一部分跨图像范围强调重要位置,例如车辆行列或行人聚集区;另一部分调整不同模式类型的强度,使描述有用边缘与纹理的通道被增强,而噪声通道被弱化。这样的注意力步骤帮助模型把精力集中在真实目标上,而不是背景杂波。
结合特写与全景线索
除了单项改进,MFR-YOLO 还改进了不同尺度信息的融合方式。一个升级的特征块称为 C3K2-PPA,将数据分成三条分支。一条关注极小的局部细节,另一条观察更广的场景块,第三条通过一段短链操作将两者连接起来。网络随后学习为任意图像给每条分支分配多少权重,并通过捷径连接混合回去以保持学习稳定。该设计使系统既能理解小目标,也能把握其周围的更大语境——在大量车辆或人员重叠或部分被遮挡时,这一点尤为重要。
新方法的效果如何
研究人员在两个公开的无人机数据集上测试了 MFR-YOLO:覆盖繁忙城市街道与不同天气的 VisDrone2021,以及聚焦车辆交通的 UA-DETRAC。与多种知名检测器相比,包括 Faster R-CNN、RetinaNet、近期的 YOLO 版本以及基于 Transformer 的模型,MFR-YOLO 在整体准确率上更高,且在检测极小目标方面显著提升,漏检更少。同时,它在典型嵌入式无人机硬件上保持了足够的实时处理速度,并且没有显著增加内存或计算开销。
这对日常无人机应用意味着什么
对于非专业读者,关键信息是:MFR-YOLO 使无人机在复杂真实场景中更快、更清晰地识别小而密集的目标。通过精心重构系统如何保留细节、适应变形目标、聚焦注意力以及融合局部与全局视角,作者在不牺牲速度的前提下提升了检测质量。这让基于无人机的交通安全监测、农业监控与应急响应工具更可靠,也为将视觉模型定制到其它更苛刻环境提供了范式。
引用: Ge, J., Lv, H., Guo, Y. et al. MFR-YOLO: advancing UAV object detection with multi-scale feature refinement via deformable convolution and global attention. Sci Rep 16, 15587 (2026). https://doi.org/10.1038/s41598-026-45641-8
关键词: 无人机目标检测, 小目标检测, YOLO, 无人机影像, 计算机视觉