Clear Sky Science · ja
MFR-YOLO:変形畳み込みとグローバル注意を用いたマルチスケール特徴洗練によるUAV物体検出の前進
なぜドローン視覚の鮮明さが重要か
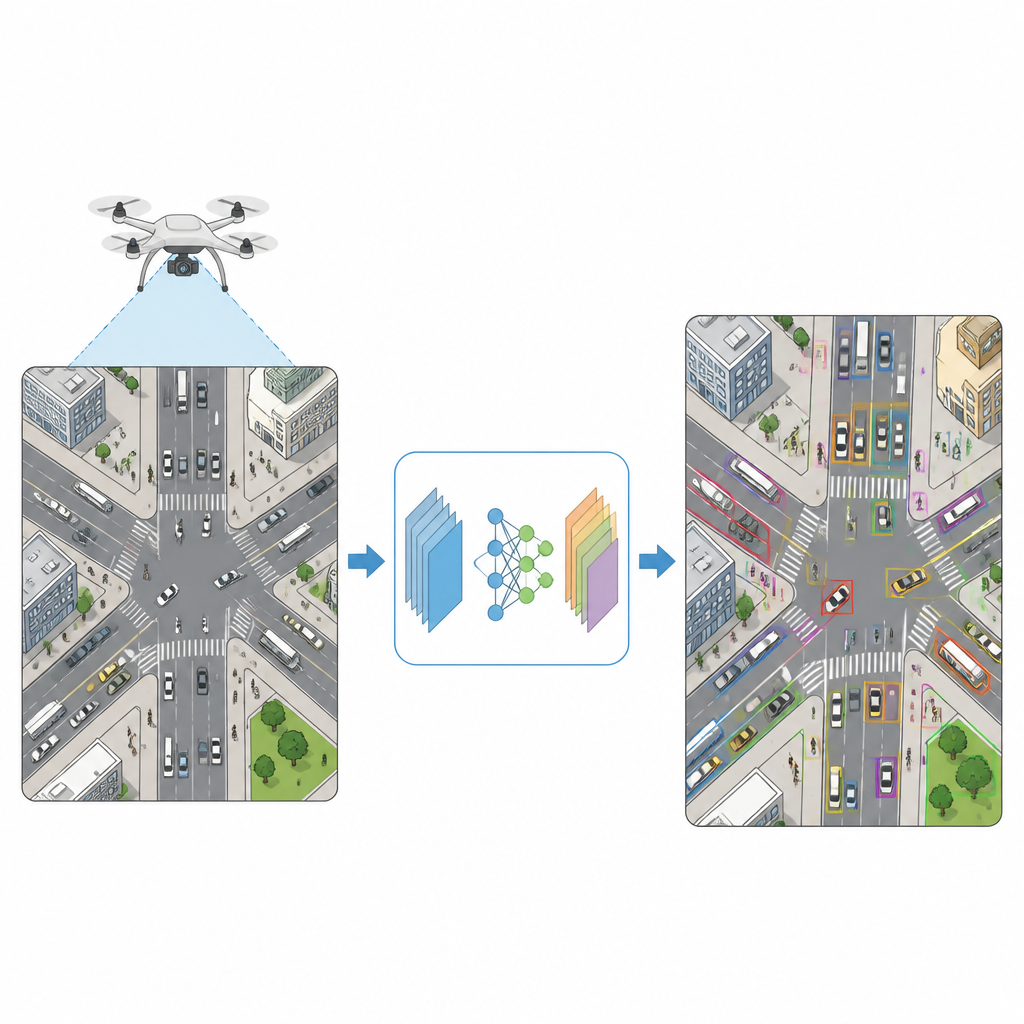
交通監視から災害時の捜索救助まで、ドローンは都市や農地の「飛行する目」としての役割を増しています。しかし、高所から小さく高速に動く車両や人を見つけるのは見た目より難しい問題です。本研究はMFR-YOLOを紹介します。これはドローンが多数の小さく歪んだ物体をリアルタイムで識別するための洗練された手法で、航空システムがより安全かつ賢明な判断を下せるようにします。
空から見ることの課題
ドローンのカメラは混雑した道路や農地、災害現場を撮影しますが、対象の多くは画像中で数ピクセルしか占めません。ドローンが移動することで物体の大きさや角度は急速に変わり、建物や樹木、影が検出対象と混ざり合います。標準的な検出システムはこうした極小ターゲットを見落としたり、背景と混同したり、精度を上げると処理が遅くなったりします。人気のあるYOLO系列は速度と精度のバランスを取っていますが、その一般的な構成要素は微細な情報を失いやすく、傾いたり伸びたりした形状に弱く、雑多な背景を抑える強力な手段を持っていないことが多いです。
小さなディテールを保つ新手法
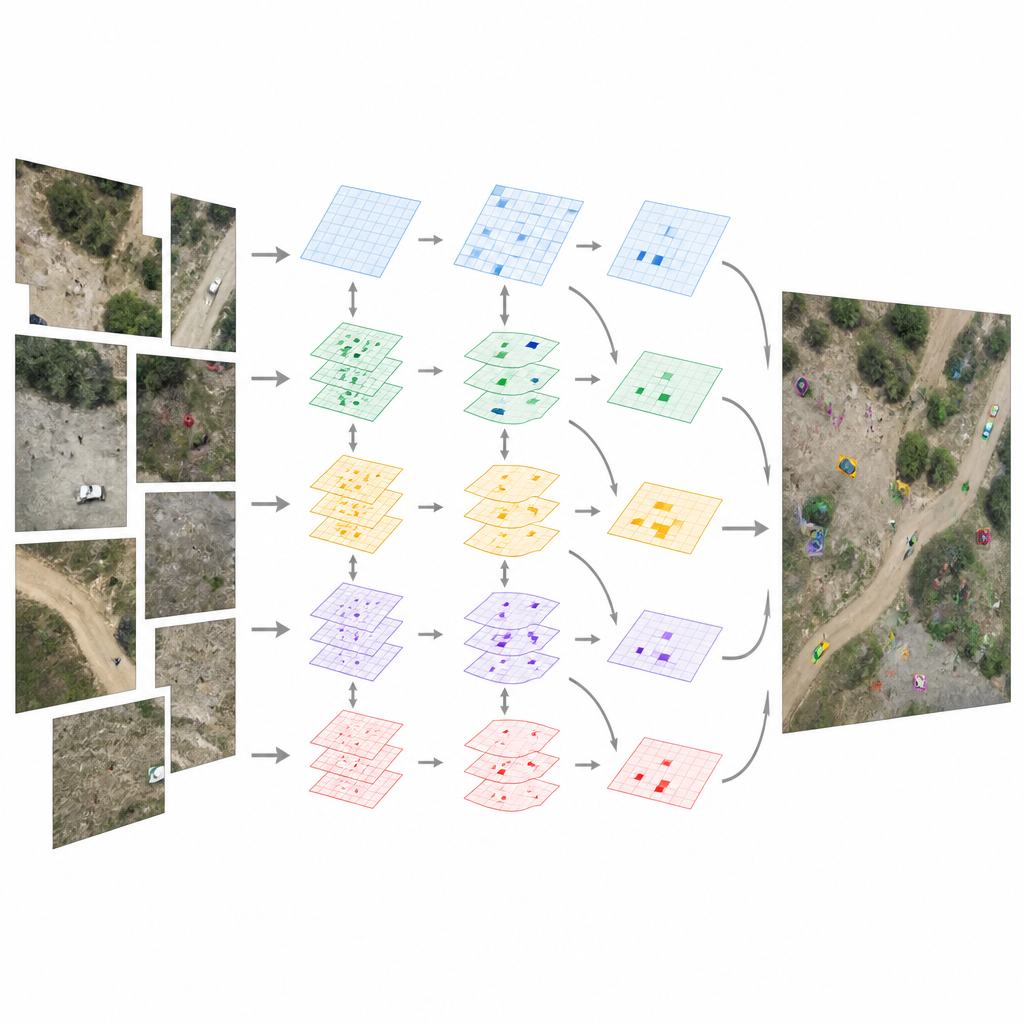
著者らはYOLOv12を基盤に、MFR-YOLOを設計して小さなディテールを保ちながら高速性を維持します。まず、並列に二つの経路を持つマルチスケール特徴抽出モジュールを導入します。一つの経路はエッジやテクスチャの鮮明さを保つことに注力し、画像がネットワーク内で縮小されても人や自転車、車が消えないようにします。もう一つの経路はサンプリング位置を「曲げる」ことのできる柔軟なフィルタ(変形フィルタ)を使い、ドローンの視点変化で回転・伸長・歪んで見える物体により適合させます。これらの経路を融合することで、非常に小さなターゲットを認識するのに必要な細かい情報を保持した、より豊かな特徴マップが得られます。
本当に重要なものを教える
ネットワークが空や木、建物に気を取られないように、研究チームは特徴構築段階と特徴混合段階の両方にグローバル注意モジュールを埋め込みます。このモジュールは、検出対象である可能性が高い領域やパターンを強調し、無関係な領域を抑えることを学習します。ある部分は画像全体を見渡して重要な位置(車列や歩行者の群れなど)を強調します。別の部分は異なるパターン種類の強度を調整し、有用なエッジやテクスチャを表すチャネルを強め、ノイズの多いチャネルを和らげます。これらの注意処理により、モデルは背景の雑多さではなく真の物体に計算資源を集中させられます。
接写と広域の手がかりを組み合わせる
単一の改良にとどまらず、MFR-YOLOは異なるスケールの情報の混合方法も洗練させます。C3K2-PPAと呼ぶ強化された特徴ブロックはデータを三つの分岐に分けます。一つは微細で局所的なディテールに集中し、もう一つはシーンのより広い領域を見渡し、三つ目は短い操作の連鎖を通じてそれらをつなぎます。ネットワークは各分岐に対してどれだけ重みを与えるかを画像ごとに学習し、ショートカットリンクを使って安定的に再融合します。この設計により、多数の車両や人が重なったり一部が隠れたりしている場面でも、小さい物体とその周囲の大きな文脈を同時に理解できます。
新手法の性能
研究者らはMFR-YOLOを二つの公開ドローンデータセットで評価しました:混雑した市街地や多様な気象を含むVisDrone2021と、車両トラフィックに焦点を当てたUA-DETRACです。Faster R-CNN、RetinaNet、最近のYOLO系、トランスフォーマーベースのモデルなど幾つかの広く知られた検出器と比較して、MFR-YOLOは全体的な精度で上回り、特に非常に小さな物体の検出数を大きく増やし、見落としを減らしました。しかも典型的な組み込みドローンハードウェアでリアルタイムに必要な処理速度を十分に上回る速度を維持し、メモリや計算量を大幅に増やすこともありませんでした。
日常的なドローン利用への意義
非専門家に向けた要点は、MFR-YOLOが混雑した現実世界の場面でドローンが小さな物体をより明確かつ迅速に見えるようにするということです。詳細を保持する方法、歪んだ形状への適応、注意による焦点付け、局所と大域の視点の融合を慎重に再設計することで、著者らは速度を犠牲にせずに検出品質を高めました。これにより交通安全、農業モニタリング、緊急対応のためのドローンベースのツールがより信頼できるものとなり、他の過酷な環境向けに視覚モデルを調整するための設計指針を提供します。
引用: Ge, J., Lv, H., Guo, Y. et al. MFR-YOLO: advancing UAV object detection with multi-scale feature refinement via deformable convolution and global attention. Sci Rep 16, 15587 (2026). https://doi.org/10.1038/s41598-026-45641-8
キーワード: UAV物体検出, 小物体検出, YOLO, ドローン画像, コンピュータビジョン