Clear Sky Science · fr
MFR-YOLO : améliorer la détection d’objets par UAV grâce au raffinement multi-échelle des caractéristiques via convolution déformable et attention globale
Pourquoi une vision de drone plus nette est importante
De la surveillance du trafic aux opérations de recherche et de sauvetage, les drones jouent de plus en plus le rôle d’yeux volants pour nos villes et nos campagnes. Pourtant, repérer de petites voitures ou des personnes en mouvement depuis une grande hauteur est beaucoup plus difficile qu’il n’y paraît. Cette étude présente MFR-YOLO, une méthode affinée permettant aux drones d’identifier en temps réel de nombreux objets petits et déformés, aidant ainsi les systèmes aériens à prendre des décisions plus sûres et plus intelligentes.
Le défi de voir depuis le ciel
Les caméras de drone capturent des rues encombrées, des fermes ou des zones sinistrées où la plupart des cibles occupent seulement quelques pixels. La taille et l’orientation des objets changent rapidement au mouvement du drone, et les bâtiments, arbres et ombres se confondent avec ce que l’on cherche à détecter. Les systèmes de détection classiques manquent souvent ces petites cibles, les confondent avec l’arrière‑plan ou ralentissent quand on améliore leur précision. La famille YOLO, populaire, équilibre déjà vitesse et précision, mais ses blocs usuels perdent encore des détails fins, peinent avec des formes inclinées ou étirées et manquent d’outils robustes pour ignorer des scènes encombrées.
Une nouvelle façon de conserver les petits détails
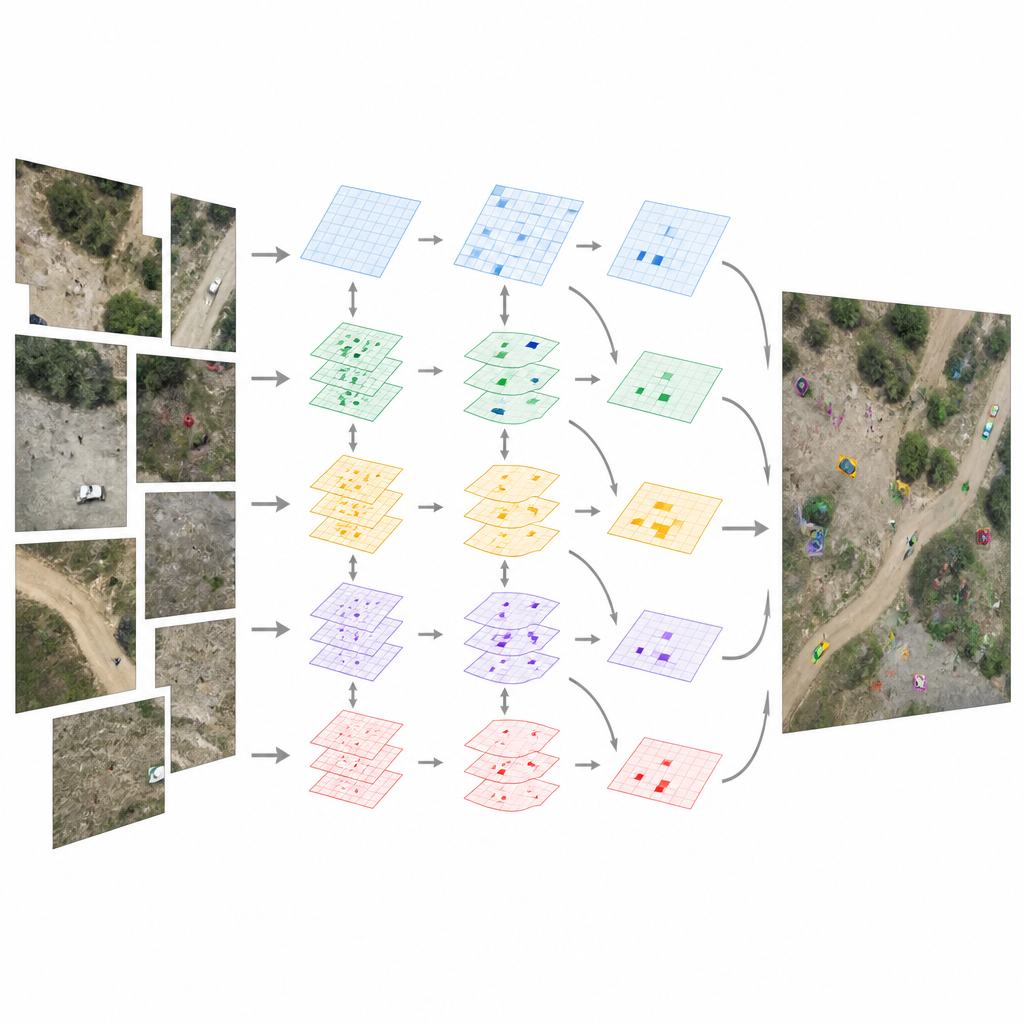
Les auteurs partent de YOLOv12 et conçoivent MFR-YOLO pour préserver les petits détails tout en restant rapide. D’abord, ils ajoutent un module d’extraction de caractéristiques multi‑échelle qui suit deux voies en parallèle. Une voie se concentre sur la préservation des bords et textures nets afin que personnes, vélos et voitures ne disparaissent pas lorsque les images sont réduites à l’intérieur du réseau. L’autre voie utilise des filtres flexibles capables de « courber » leurs positions d’échantillonnage, s’ajustant mieux aux objets apparaissant tournés, étirés ou déformés à cause du point de vue changeant du drone. La fusion de ces voies produit des cartes plus riches qui conservent l’information fine nécessaire pour reconnaître des cibles très petites.
Apprendre au modèle à distinguer l’essentiel
Pour empêcher le réseau d’être distrait par le ciel, les arbres ou les bâtiments, l’équipe intègre un module d’attention globale à la fois dans les étapes de construction et de mélange des caractéristiques. Ce module apprend à mettre en valeur les régions et motifs susceptibles de correspondre à des cibles tout en atténuant les zones non pertinentes. Une partie balaie l’image pour souligner des emplacements importants, comme des rangées de véhicules ou des groupes de piétons. Une autre ajuste la force des différents types de motifs, de sorte que les canaux décrivant des bords et textures utiles soient amplifiés tandis que les canaux bruyants sont adoucis. Ensemble, ces étapes attentionnelles permettent au modèle de concentrer ses efforts sur les objets réels plutôt que sur le désordre du fond.
Combiner indices rapprochés et vues larges
Au‑delà des améliorations isolées, MFR-YOLO affine aussi la façon dont l’information à différentes échelles est fusionnée. Un bloc de caractéristiques amélioré, nommé C3K2-PPA, divise les données en trois branches. L’une se concentre sur de très petits détails locaux, une autre examine des zones plus larges de la scène, et une troisième les relie via une courte chaîne d’opérations. Le réseau apprend ensuite combien de poids attribuer à chaque branche pour une image donnée, les recomposant avec un lien raccourci pour maintenir la stabilité de l’apprentissage. Cette conception permet au système de comprendre à la fois les petits objets et le contexte plus large qui les entoure, ce qui est essentiel lorsque de nombreux véhicules ou personnes se chevauchent ou sont partiellement masqués.
Quelle est l’efficacité de la nouvelle approche
Les chercheurs ont testé MFR-YOLO sur deux jeux de données publics pour drones : VisDrone2021, qui couvre des rues urbaines encombrées et des conditions météo variées, et UA-DETRAC, axé sur le trafic de véhicules. Comparé à plusieurs détecteurs bien connus, dont Faster R‑CNN, RetinaNet, des versions récentes de YOLO et des modèles à base de transformeurs, MFR-YOLO atteint une précision globale supérieure et, surtout, détecte beaucoup plus d’objets très petits tout en en manquant moins. Il réalise cela tout en conservant une vitesse de traitement largement suffisante pour une utilisation en temps réel sur du matériel embarqué typique de drone, sans exiger une augmentation importante de mémoire ou de calcul.
Ce que cela signifie pour l’usage courant des drones
Pour les non‑spécialistes, le message clé est que MFR-YOLO aide les drones à voir plus clairement et plus rapidement des objets petits et encombrés dans des scènes réelles et chaotiques. En repensant soigneusement la manière dont le système conserve le détail, s’adapte aux formes déformées, focalise l’attention et fusionne vues locales et globales, les auteurs améliorent la qualité de détection sans sacrifier la vitesse. Cela rend les outils drones pour la sécurité routière, la surveillance agricole et les interventions d’urgence plus fiables, et fournit un modèle pour adapter la vision par ordinateur à d’autres environnements exigeants.
Citation: Ge, J., Lv, H., Guo, Y. et al. MFR-YOLO: advancing UAV object detection with multi-scale feature refinement via deformable convolution and global attention. Sci Rep 16, 15587 (2026). https://doi.org/10.1038/s41598-026-45641-8
Mots-clés: Détection d’objets UAV, détection d’objets de petite taille, YOLO, imagerie par drone, vision par ordinateur