Clear Sky Science · tr
MFR-YOLO: deformable konvolüsyon ve küresel dikkat yoluyla çok ölçekli özellik rafinasyonu ile İHA nesne algılama alanında ilerleme
Neden daha keskin drone görüşü önemli
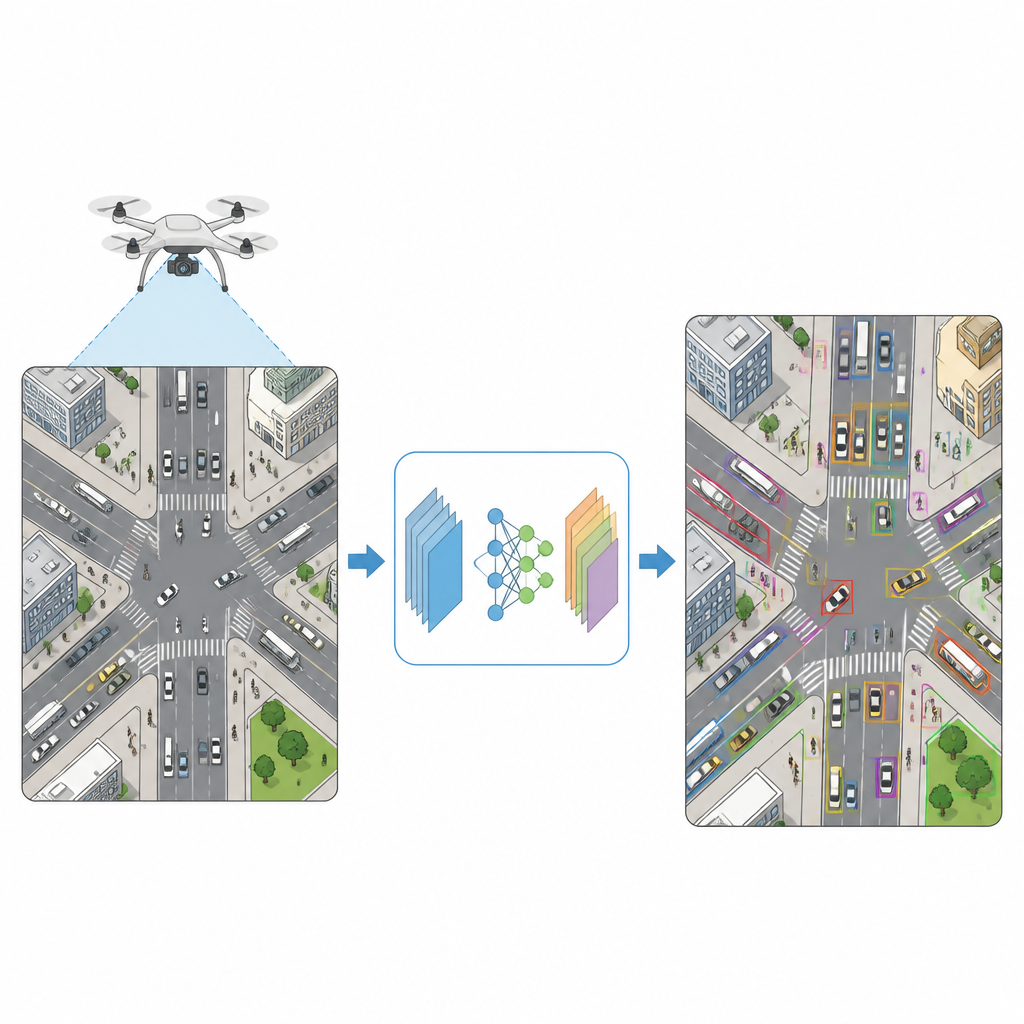
Trafik takibinden afet arama-kurtarmaya kadar drone’lar giderek şehirlerimiz ve tarlalarımız için uçan gözler olarak görev yapıyor. Ancak yüksekten küçük, hızlı hareket eden araçları veya insanları tespit etmek göründüğü kadar kolay değil. Bu çalışma, drone’ların gerçek zamanlı olarak birçok küçük ve bozulmuş nesneyi ayırt etmesini sağlayan MFR-YOLO’yu tanıtıyor; bu da hava tabanlı sistemlerin daha güvenli ve akıllı kararlar almasına yardımcı oluyor.
Gökyüzünden görmenin zorluğu
Drone kameraları, hedeflerin çoğunun yalnızca birkaç piksel kapladığı kalabalık sokakları, tarımları veya afet bölgelerini kaydeder. Drone hareket ettikçe nesneler hızla boyut ve açı değiştirir; binalar, ağaçlar ve gölgeler tespit edilmek istenen nesnelerle karışır. Standart algılama sistemleri bu küçük hedefleri sıklıkla kaçırır, arka plan ile karıştırır veya doğruluğu artırıldığında yavaşlar. Popüler YOLO ailesi algılama hız ve doğruluk arasında zaten bir denge kuruyor, ancak kullanılan parçalar ince detayları kaybediyor, eğik veya gerilmiş şekillerle uğraşmakta zorlanıyor ve dağınık sahneleri yoksaymak için yeterli güçlü araçlardan yoksun kalıyor.
Küçük ayrıntıları korumanın yeni yolu
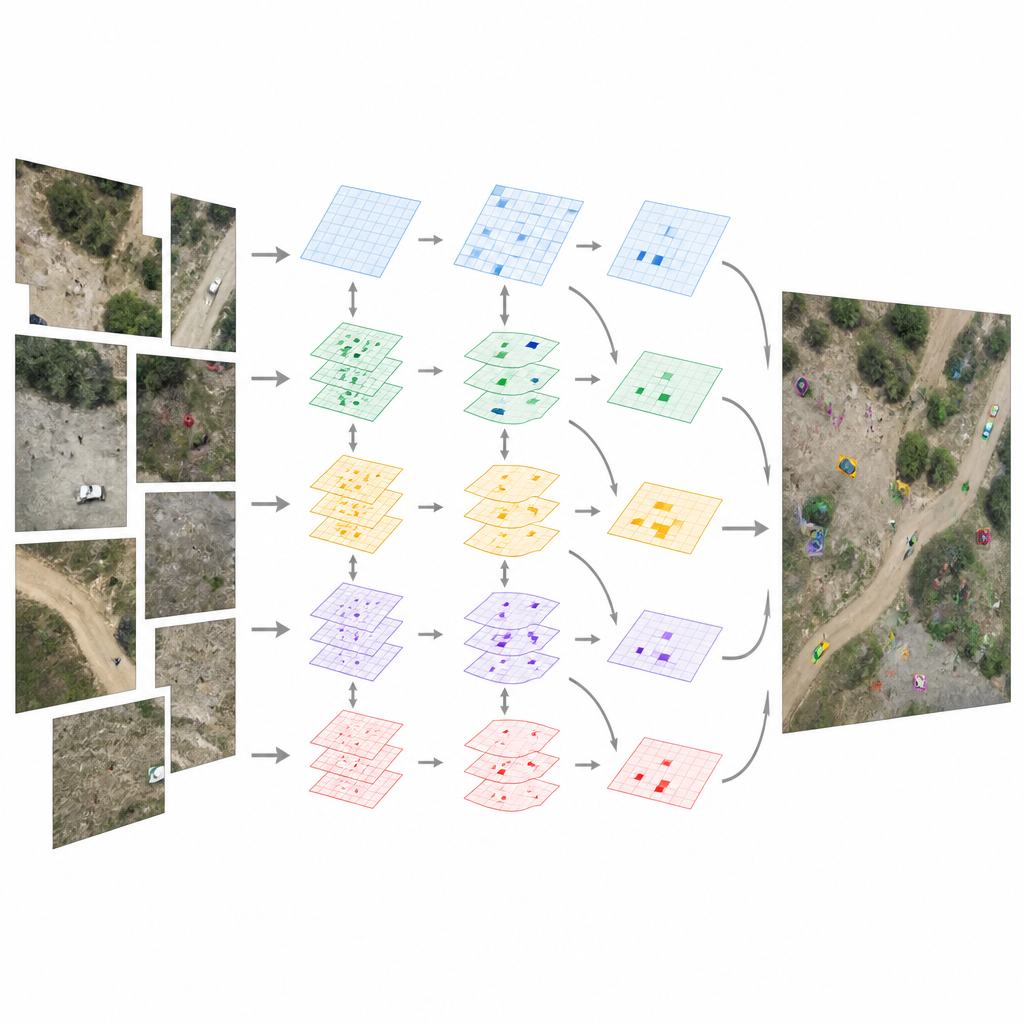
Yazarlar YOLOv12 üzerinde geliştirme yaparak MFR-YOLO’yu küçük ayrıntıları korurken hızlı kalacak şekilde tasarlıyor. Öncelikle, paralel iki yol izleyen çok ölçekli bir özellik çıkarım modülü ekliyorlar. Bir yol, insan, bisiklet ve araba gibi nesnelerin ağ içinde görüntü küçültüldüğünde kaybolmaması için keskin kenarları ve dokuları korumaya odaklanıyor. Diğer yol ise örnekleme konumlarını “bükebilen” esnek filtreler kullanarak, drone’un değişen bakış açısından dolayı döndürülmüş, gerilmiş veya çarpılmış görünen nesnelere daha iyi uyum sağlıyor. Bu yolların füzyonu, çok küçük hedefleri tanımak için gereken ince bilgiyi hâlâ taşıyan daha zengin haritalar üretiyor.
Modele gerçekten önemli olanı öğretmek
Ağı gökyüzü, ağaçlar veya binalar tarafından dikkatinin dağılmaması için ekip, hem özellik oluşturma hem de özellik karıştırma aşamalarında küresel bir dikkat modülü yerleştiriyor. Bu modül, muhtemel hedeflere ait olan bölgeleri ve desenleri vurgulamayı, alakasız alanları ise zayıflatmayı öğreniyor. Bir bileşen, araç sıraları veya yaya kümeleri gibi önemli konumları öne çıkarmak için görüntü genelinde bakıyor. Diğer bileşen ise farklı desen türlerinin gücünü ayarlıyor; faydalı kenar ve doku kanalları güçlendirilirken gürültülü olanlar yumuşatılıyor. Bu dikkat adımları birlikte modelin çabalarını arka plan karmaşası yerine gerçek nesnelere harcamasına yardımcı oluyor.
Yakın ve geniş görüş ipuçlarını birleştirmek
Tekil iyileştirmelerin ötesinde, MFR-YOLO farklı ölçeklerdeki bilgilerin nasıl harmanlandığını da rafine ediyor. C3K2-PPA adı verilen yükseltilmiş bir özellik bloğu veriyi üç dala ayırıyor. Biri küçük, yerel detaylara yoğunlaşırken, diğeri sahnenin daha geniş yamalarına bakıyor ve üçüncüsü bunları kısa bir işlem zinciri aracılığıyla bağlıyor. Ağ daha sonra herhangi bir görüntü için hangi dala ne kadar ağırlık verileceğini öğreniyor ve bunları öğrenmeyi istikrarlı tutmak için bir kısayol bağlantısıyla geri karıştırıyor. Bu tasarım, sistemin çok sayıda aracın veya insanın üst üste bindiği veya kısmen gizlendiği durumlarda hem küçük nesneleri hem de etraflarındaki daha büyük bağlamı anlamasını sağlıyor.
Yeni yaklaşımın ne kadar iyi çalıştığı
Araştırmacılar MFR-YOLO’yu iki kamu İHA veri kümesi üzerinde test etti: yoğun şehir sokakları ve değişken hava koşullarını kapsayan VisDrone2021 ve araç trafiğine odaklanan UA-DETRAC. Faster R-CNN, RetinaNet, son YOLO sürümleri ve dönüştürücü tabanlı modeller de dahil olmak üzere birkaç iyi bilinen detektörle karşılaştırıldığında, MFR-YOLO daha yüksek genel doğruluk elde etti ve önemli olarak çok daha fazla çok küçük nesneyi tespit ederken daha az hedefi kaçırdı. Tüm bunları yaparken tipik gömülü drone donanımında gerçek zamanlı kullanım için gerekli seviyenin çok üzerinde işlem hızını korudu ve bellek veya hesaplamada büyük bir artış gerektirmedi.
Günlük drone kullanımında bunun anlamı
Uzman olmayanlar için ana mesaj şudur: MFR-YOLO, dağınık gerçek dünya sahnelerinde drone’ların küçük ve yoğun nesneleri daha net ve hızlı görmesine yardımcı oluyor. Sistemin ayrıntıları nasıl koruduğunu, bozulmuş şekillere nasıl uyum sağladığını, dikkati nasıl odakladığını ve yerel ile küresel görünümleri nasıl birleştirdiğini dikkatle yeniden tasarlayarak yazarlar doğruluğu hızdan ödün vermeden yükseltiyor. Bu, trafik güvenliği, tarımsal izleme ve acil müdahale için drone tabanlı araçları daha güvenilir kılıyor ve görme modellerini diğer zorlu ortamlara uyarlamak için bir şablon sunuyor.
Atıf: Ge, J., Lv, H., Guo, Y. et al. MFR-YOLO: advancing UAV object detection with multi-scale feature refinement via deformable convolution and global attention. Sci Rep 16, 15587 (2026). https://doi.org/10.1038/s41598-026-45641-8
Anahtar kelimeler: İHA nesne algılama, küçük nesne algılama, YOLO, drone görüntüleri, bilgisayarla görme