Clear Sky Science · es
MFR-YOLO: avance en la detección de objetos por UAV mediante refinamiento multiescala de características con convolución deformable y atención global
Por qué importa una visión de drones más nítida
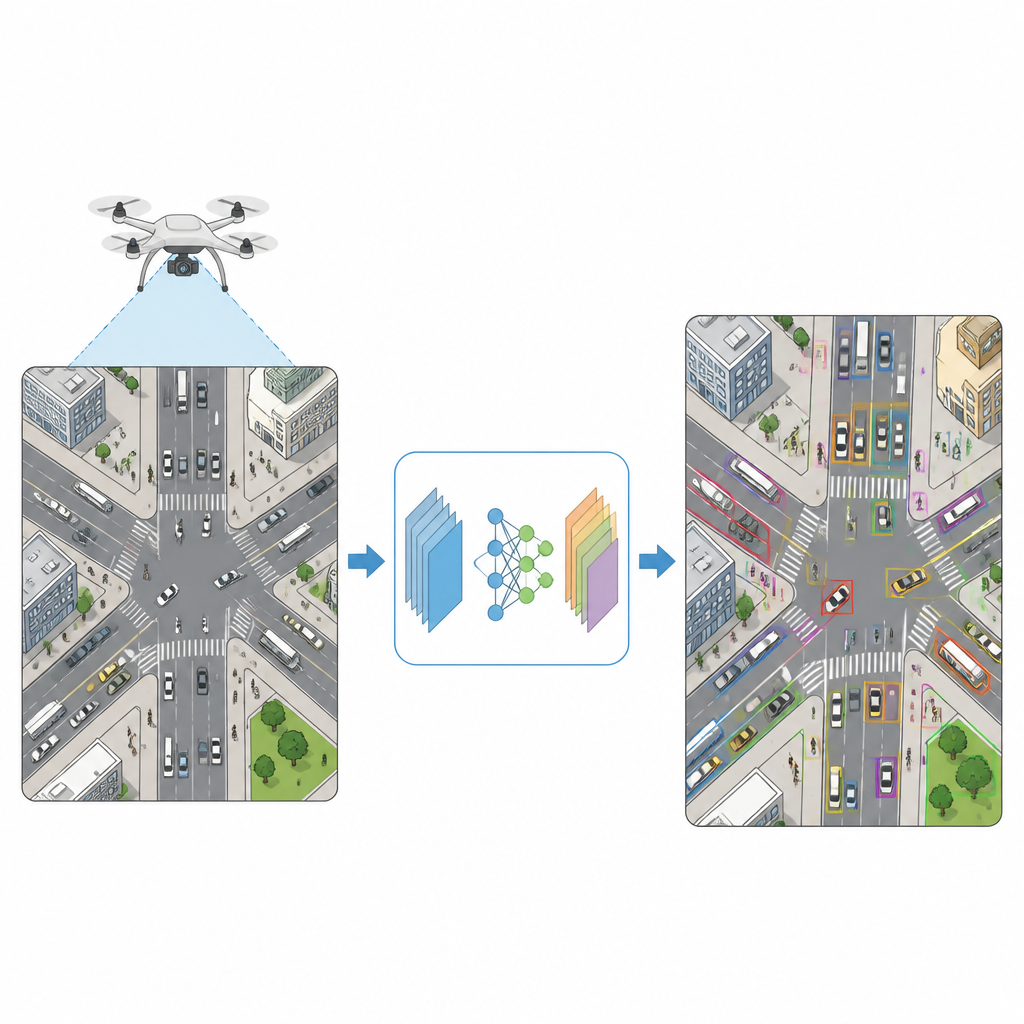
Desde el control del tráfico hasta búsquedas y rescates en desastres, los drones actúan cada vez más como ojos voladores para nuestras ciudades y campos. Sin embargo, detectar coches o personas diminutas y rápidas desde lo alto es mucho más difícil de lo que parece. Este estudio presenta MFR-YOLO, una forma refinada para que los drones identifiquen en tiempo real numerosos objetos pequeños y distorsionados, ayudando a los sistemas aéreos a tomar decisiones más seguras e inteligentes.
El desafío de ver desde el cielo
Las cámaras de los drones capturan calles concurridas, campos o zonas de desastre donde la mayoría de los objetivos ocupan solo unos pocos píxeles. Los objetos cambian de tamaño y ángulo rápidamente a medida que el dron se mueve, y edificios, árboles y sombras se mezclan con lo que queremos detectar. Los sistemas de detección estándar con frecuencia pierden estos objetivos diminutos, los confunden con el fondo o se ralentizan cuando se hace que sean más precisos. La popular familia de detectores YOLO ya equilibra velocidad y precisión, pero sus bloques habituales aún pierden detalles finos, tienen dificultades con formas inclinadas o estiradas y carecen de herramientas potentes para ignorar escenarios con mucho ruido de fondo.
Una nueva forma de conservar los detalles diminutos
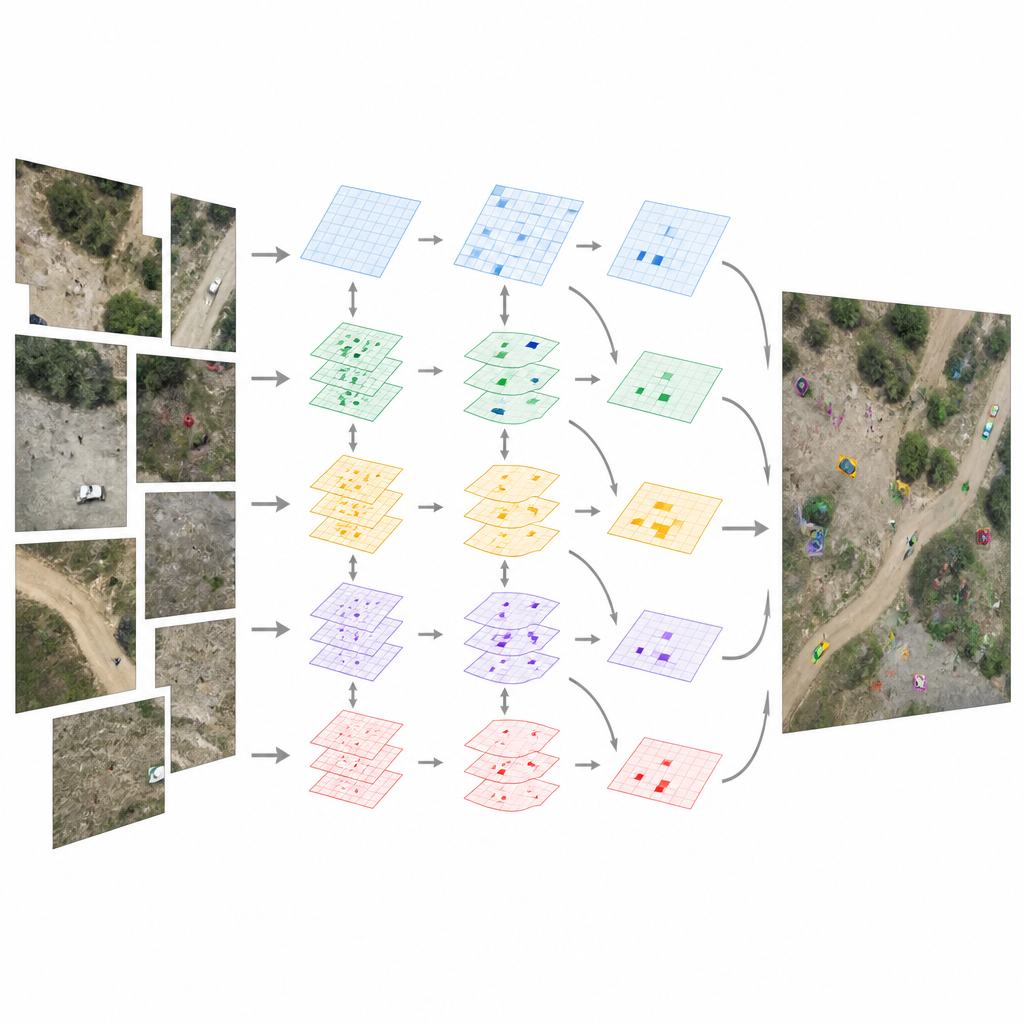
Los autores parten de YOLOv12 y diseñan MFR-YOLO para proteger los pequeños detalles sin perder velocidad. Primero, añaden un módulo de extracción de características multiescala que sigue dos trayectorias en paralelo. Una trayectoria se centra en preservar bordes y texturas nítidos para que personas, bicicletas y coches no desaparezcan cuando las imágenes se reducen dentro de la red. La otra utiliza filtros flexibles que pueden «doblar» sus posiciones de muestreo, adaptándose mejor a objetos que aparecen rotados, estirados o sesgados debido al cambio de punto de vista del dron. La fusión de estas trayectorias produce mapas más ricos que siguen conservando la información fina necesaria para reconocer objetivos muy pequeños.
Enseñar al modelo qué es realmente importante
Para evitar que la red se distraiga con cielo, árboles o edificios, el equipo integra un módulo de atención global tanto en la etapa de construcción de características como en la de mezcla de características. Este módulo aprende a resaltar regiones y patrones que pertenecen a blancos probables mientras atenúa áreas irrelevantes. Una parte observa la imagen en su conjunto para enfatizar ubicaciones importantes, como filas de vehículos o agrupaciones de peatones. Otra parte ajusta la intensidad de distintos tipos de patrones, de modo que los canales que describen bordes y texturas útiles se refuercen mientras que los ruidosos se suavizan. En conjunto, estos pasos de atención ayudan al modelo a concentrar su esfuerzo en objetos reales en vez del desorden de fondo.
Combinar pistas de cerca y de vista amplia
Más allá de mejoras individuales, MFR-YOLO también refina cómo se mezcla la información a diferentes escalas. Un bloque de características mejorado, llamado C3K2-PPA, divide los datos en tres ramas. Una se concentra en detalles locales y diminutos, otra examina parches más amplios de la escena y una tercera las enlaza a través de una cadena corta de operaciones. La red aprende entonces cuánto peso dar a cada rama para una imagen dada, remezclándolas con un enlace de atajo para mantener estable el aprendizaje. Este diseño permite al sistema entender tanto los objetos pequeños como el contexto más amplio que los rodea, lo cual es vital cuando muchos vehículos o personas se solapan o están parcialmente ocultos.
Qué tan bien funciona el nuevo enfoque
Los investigadores evaluaron MFR-YOLO en dos conjuntos de datos públicos para drones: VisDrone2021, que cubre calles urbanas concurridas y condiciones meteorológicas variadas, y UA-DETRAC, centrado en tráfico vehicular. En comparación con varios detectores conocidos, incluidos Faster R‑CNN, RetinaNet, versiones recientes de YOLO y modelos basados en transformadores, MFR-YOLO alcanzó mayor precisión global y, lo que es más importante, detectó muchos más objetos muy pequeños mientras fallaba en localizar menos objetivos. Todo ello manteniendo su velocidad de procesamiento por encima del nivel necesario para uso en tiempo real en el hardware empotrado típico de drones, y sin requerir un gran aumento de memoria o cómputo.
Qué significa esto para el uso cotidiano de drones
Para el público no especialista, el mensaje clave es que MFR-YOLO ayuda a los drones a ver objetos pequeños y concurridos con más claridad y rapidez en escenas reales y desordenadas. Al rediseñar cuidadosamente cómo el sistema conserva el detalle, se adapta a formas deformadas, enfoca la atención y fusiona vistas locales y globales, los autores mejoran la calidad de la detección sin sacrificar la velocidad. Esto hace que las herramientas basadas en drones para seguridad vial, monitorización agrícola y respuesta a emergencias sean más fiables, y ofrece una hoja de ruta para adaptar modelos de visión a otros entornos exigentes.
Cita: Ge, J., Lv, H., Guo, Y. et al. MFR-YOLO: advancing UAV object detection with multi-scale feature refinement via deformable convolution and global attention. Sci Rep 16, 15587 (2026). https://doi.org/10.1038/s41598-026-45641-8
Palabras clave: Detección de objetos en UAV, detección de objetos pequeños, YOLO, imágenes de drones, visión por ordenador