Clear Sky Science · it
MFR-YOLO: migliorare il rilevamento di oggetti con UAV tramite raffinamento multi-scala delle feature mediante convoluzione deformabile e attenzione globale
Perché una visione più nitida dei droni è importante
Dal monitoraggio del traffico alla ricerca e soccorso in caso di disastro, i droni agiscono sempre più spesso come occhi volanti per le nostre città e campagne. Tuttavia individuare auto o persone molto piccole e in rapido movimento da grandi altezze è molto più difficile di quanto sembri. Questo studio introduce MFR-YOLO, un metodo raffinato che consente ai droni di individuare numerosi oggetti piccoli e deformati in tempo reale, aiutando i sistemi aerei a prendere decisioni più sicure e intelligenti.
La sfida del guardare dal cielo
Le telecamere dei droni riprendono strade affollate, campi o zone di disastro dove la maggior parte degli obiettivi occupa solo pochi pixel. Gli oggetti cambiano rapidamente dimensione e orientamento mentre il drone si muove, e edifici, alberi e ombre si mescolano con ciò che vogliamo rilevare. I sistemi di rilevamento standard spesso perdono questi bersagli minuscoli, li confondono con lo sfondo o rallentano quando vengono resi più accurati. La popolare famiglia di detector YOLO già bilancia velocità e precisione, ma i suoi blocchi costitutivi convenzionali tendono comunque a perdere dettagli fini, a faticare con forme inclinate o deformate e mancano di strumenti potenti per ignorare scenari ingombrati.
Un nuovo modo per preservare i dettagli minuti
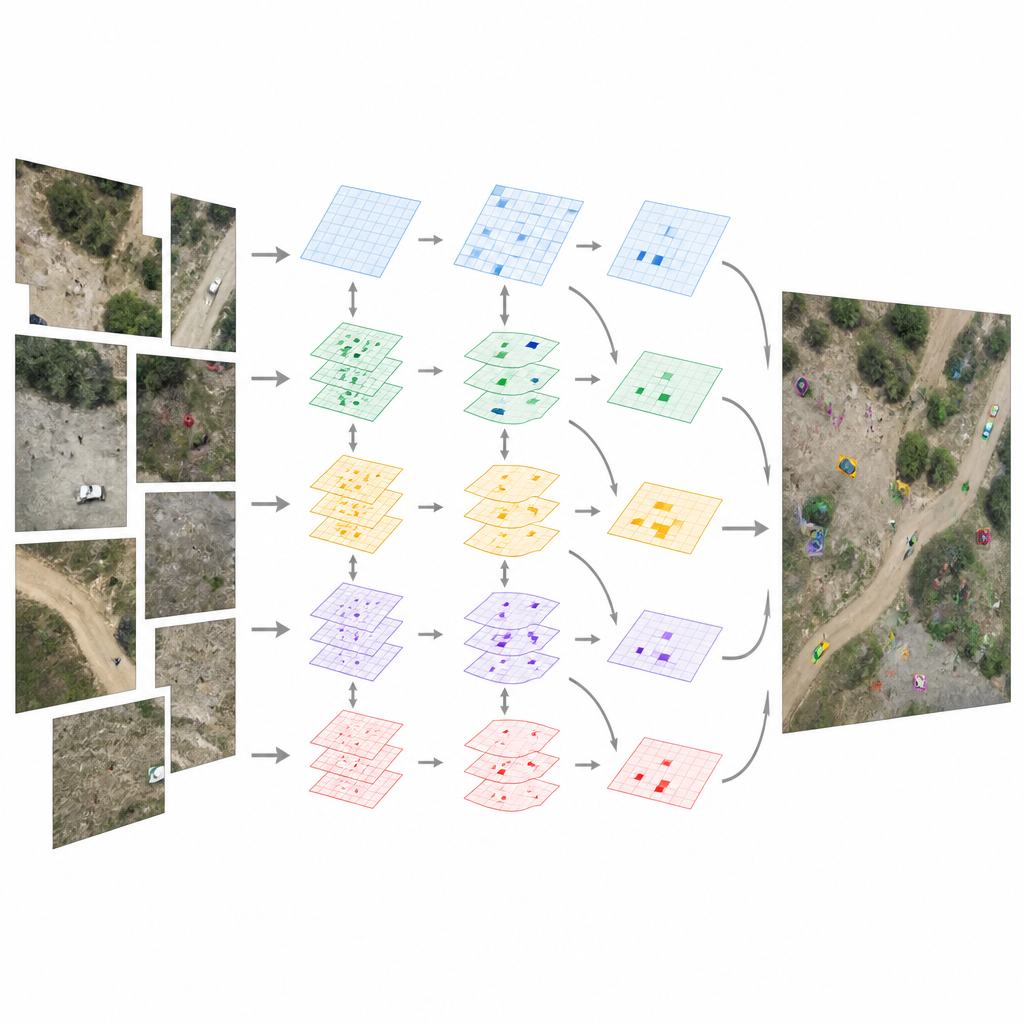
Gli autori partono da YOLOv12 e progettano MFR-YOLO per proteggere i dettagli piccoli mantenendo la rapidità. Per prima cosa aggiungono un modulo di estrazione delle feature multi-scala che segue due percorsi in parallelo. Un percorso si concentra nel preservare bordi e texture nitidi in modo che persone, bici e auto non scompaiano quando le immagini vengono ridotte all’interno della rete. L’altro percorso usa filtri flessibili che possono “flettersi” nelle posizioni di campionamento, adattandosi meglio agli oggetti che appaiono ruotati, stirati o inclinati a causa del punto di vista variabile del drone. Fondendo questi percorsi si ottengono mappe più ricche che conservano comunque le informazioni fini necessarie per riconoscere bersagli molto piccoli.
Insegnare al modello ciò che conta davvero
Per impedire che la rete venga distratta da cielo, alberi o edifici, il team integra un modulo di attenzione globale sia nelle fasi di costruzione delle feature sia in quelle di fusione. Questo modulo impara a evidenziare regioni e pattern che appartengono a probabili bersagli attenuando le aree irrilevanti. Una parte guarda l’immagine nel suo insieme per enfatizzare posizioni importanti, come file di veicoli o gruppi di pedoni. Un’altra parte regola la forza dei diversi tipi di pattern, in modo che i canali che descrivono bordi e texture utili vengano potenziati mentre quelli rumorosi vengono addolciti. Insieme questi passaggi attentivi aiutano il modello a concentrare le risorse sugli oggetti veri invece che sul disordine di fondo.
Combinare indizi ravvicinati e a vista d’insieme
Oltre ai singoli miglioramenti, MFR-YOLO perfeziona anche il modo in cui le informazioni a scale diverse vengono unite. Un blocco di feature aggiornato, chiamato C3K2-PPA, divide i dati in tre rami. Uno si concentra su dettagli locali e minuscoli, un altro osserva patch più ampie della scena e un terzo li collega tramite una breve catena di operazioni. La rete poi impara quanto peso assegnare a ciascun ramo per una data immagine, ricombinandoli con un collegamento shortcut per mantenere stabile l’apprendimento. Questo design permette al sistema di comprendere sia gli oggetti piccoli sia il contesto più ampio attorno a essi, fondamentale quando molti veicoli o persone si sovrappongono o sono parzialmente nascosti.
Quanto funziona il nuovo approccio
I ricercatori hanno testato MFR-YOLO su due dataset pubblici di droni: VisDrone2021, che copre strade cittadine affollate e condizioni meteorologiche varie, e UA-DETRAC, incentrato sul traffico veicolare. In confronto con diversi detector noti fra cui Faster R-CNN, RetinaNet, versioni recenti di YOLO e modelli basati su transformer, MFR-YOLO ha raggiunto una maggiore accuratezza complessiva e, cosa importante, ha rilevato molti più oggetti molto piccoli riducendo il numero di bersagli mancati. Ha fatto tutto ciò mantenendo una velocità di elaborazione ben al di sopra del livello necessario per l’uso in tempo reale su tipico hardware embedded da drone, senza richiedere un significativo aumento di memoria o calcolo.
Cosa significa per l’uso quotidiano dei droni
Per i non specialisti, il messaggio chiave è che MFR-YOLO aiuta i droni a vedere oggetti piccoli e affollati in modo più chiaro e veloce in scene reali caotiche. Ridisegnando con cura come il sistema conserva i dettagli, si adatta a forme deformate, concentra l’attenzione e fonde viste locali e globali, gli autori migliorano la qualità del rilevamento senza sacrificare la velocità. Questo rende gli strumenti basati su droni per la sicurezza del traffico, il monitoraggio agricolo e la risposta alle emergenze più affidabili e offre un modello per adattare i modelli di visione ad altri ambienti impegnativi.
Citazione: Ge, J., Lv, H., Guo, Y. et al. MFR-YOLO: advancing UAV object detection with multi-scale feature refinement via deformable convolution and global attention. Sci Rep 16, 15587 (2026). https://doi.org/10.1038/s41598-026-45641-8
Parole chiave: rilevamento oggetti UAV, rilevamento piccoli oggetti, YOLO, immagini da drone, visione artificiale