Clear Sky Science · en
MFR-YOLO: advancing UAV object detection with multi-scale feature refinement via deformable convolution and global attention
Why sharper drone vision matters
From traffic monitoring to disaster search and rescue, drones increasingly act as flying eyes for our cities and fields. Yet spotting tiny, fast moving cars or people from high above is much harder than it looks. This study introduces MFR-YOLO, a refined way for drones to pick out many small and distorted objects in real time, helping aerial systems make safer and smarter decisions.
The challenge of seeing from the sky
Drone cameras capture crowded streets, farms, or disaster zones where most targets occupy only a few pixels. Objects change size and angle quickly as the drone moves, and buildings, trees, and shadows blend with what we want to detect. Standard detection systems often miss these tiny targets, confuse them with background, or slow down when made more accurate. The popular YOLO family of detectors already balances speed and precision, but its usual building blocks still lose fine details, struggle with tilted or stretched shapes, and lack strong tools to ignore cluttered scenery.
A new way to keep tiny details
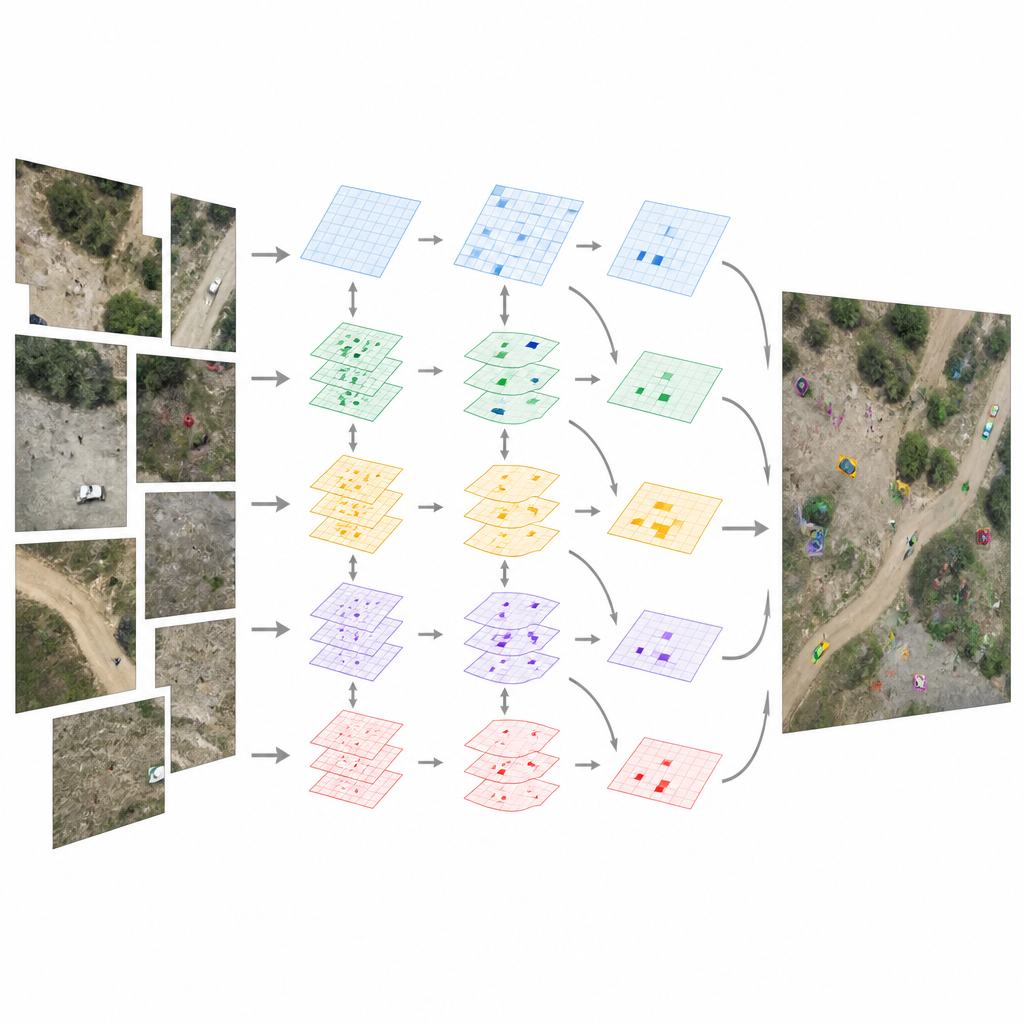
The authors build on YOLOv12 and design MFR-YOLO to protect small details while staying fast. First, they add a multi scale feature extraction module that follows two paths in parallel. One path focuses on preserving crisp edges and textures so that people, bikes, and cars do not vanish when images are shrunk inside the network. The other path uses flexible filters that can “bend” their sampling positions, better matching objects that appear rotated, stretched, or skewed because of the drone’s changing viewpoint. Fusing these paths produces richer maps that still carry the fine information needed to recognize very small targets.
Teaching the model what really matters
To keep the network from being distracted by sky, trees, or buildings, the team embeds a global attention module in both the feature building and feature mixing stages. This module learns to highlight regions and patterns that belong to likely targets while dimming irrelevant areas. One part looks across the image to emphasize important locations, such as rows of vehicles or clusters of pedestrians. Another part adjusts the strength of different pattern types, so channels that describe useful edges and textures are boosted while noisy ones are softened. Together these attentional steps help the model spend its effort on true objects instead of background clutter.
Combining close up and wide view clues
Beyond single improvements, MFR-YOLO also refines how information at different scales is blended. An upgraded feature block, called C3K2-PPA, splits the data into three branches. One concentrates on tiny, local details, another looks at broader patches of the scene, and a third links them through a short chain of operations. The network then learns how much weight to give each branch for any given image, mixing them back together with a shortcut link to keep learning stable. This design lets the system understand both small objects and the larger context around them, which is vital when many vehicles or people overlap or are partly hidden.
How well the new approach works
The researchers tested MFR-YOLO on two public drone datasets: VisDrone2021, which covers busy city streets and varied weather, and UA-DETRAC, focused on vehicle traffic. Compared with several well known detectors including Faster R CNN, RetinaNet, recent YOLO versions, and transformer based models, MFR-YOLO reached higher overall accuracy and, importantly, detected many more very small objects while missing fewer targets. It did all this while keeping its processing speed well above the level needed for real time use on typical embedded drone hardware, and without requiring a large increase in memory or computation.
What this means for everyday drone use
For non specialists, the key message is that MFR-YOLO helps drones see small and crowded objects more clearly and quickly in messy real world scenes. By carefully redesigning how the system keeps detail, adapts to warped shapes, focuses attention, and fuses local and global views, the authors raise detection quality without sacrificing speed. This makes drone based tools for traffic safety, agricultural monitoring, and emergency response more reliable, and offers a blueprint for tailoring vision models to other demanding environments.
Citation: Ge, J., Lv, H., Guo, Y. et al. MFR-YOLO: advancing UAV object detection with multi-scale feature refinement via deformable convolution and global attention. Sci Rep 16, 15587 (2026). https://doi.org/10.1038/s41598-026-45641-8
Keywords: UAV object detection, small object detection, YOLO, drone imagery, computer vision