Clear Sky Science · zh
软体仿生驱动解释了触须在海豹触须感知中的功能作用
海豹在水下的隐秘感官
海豹能在黑暗、浑浊的水中追踪鱼类——在这种环境下视觉几乎无用,但它们仍能沿着猎物留下的无形路线前进。该研究探讨了海豹触须的特殊形状和运动如何将微弱的水流扰动转化为清晰信号,并且工程师如何制造出软体仿生复制件以理解并将来在水下技术中再利用这一能力。 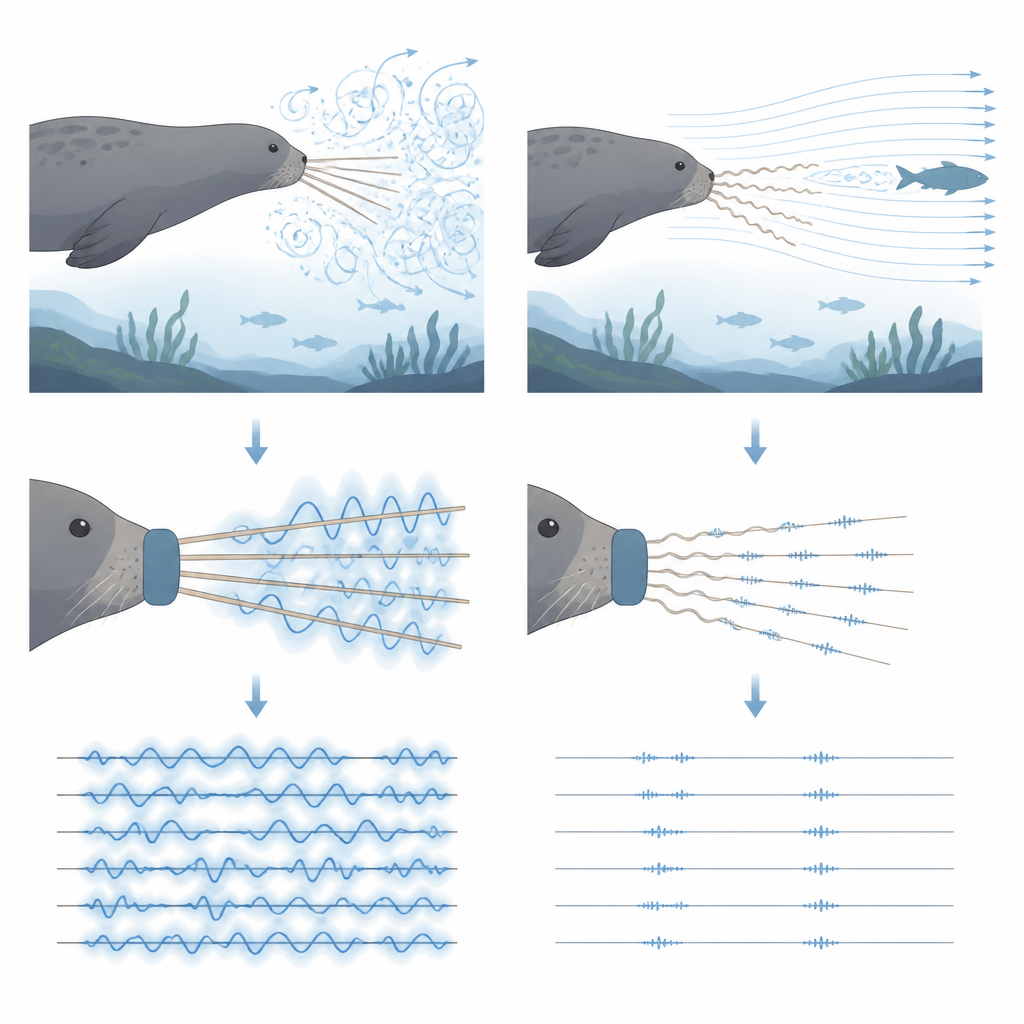
触须如何“读取”水流
许多动物通过运动来感知世界:蝙蝠发出声波,老鼠用触须扫过物体。海豹在水中做了类似的事情。它们的触须神经末梢密集,能探测游动鱼类产生的微小波纹。港海豹的触须呈波浪状、带有珠节状结构,而加州海狮的触须则更光滑。人们曾猜测波浪形状可以抑制海豹自身游动引起的不必要振动,从而让猎物产生的流动信号更显著。然而至今大多数测试使用刚性塑料模型或将触须视为静止的感测元件,忽略了真实海豹会主动摆动触须这一事实。
在流动水中测试真实触须
研究人员在水洞中比较了来自一只港海豹和一只加州海狮的真实触须。通过激光测量微观运动,他们首先观察在仅有稳定水流通过时每根触须的振动程度。光滑的海狮触须振动明显,而波浪状的港海豹触须振幅约小三倍。当团队在上游加入一个圆柱以模拟鱼类产生的旋涡尾流时,两种触须都开始随重复出现的涡旋同步摆动。对港海豹触须而言,来自尾流的有用信号比自生振动带来的背景噪声强大五十倍以上,远高于海狮触须的情况。
制造软人工肌肉
在野外,海豹不会只是把触须固定不动;它们会摆动触须来回,并在感知到猎物时将其向前推。为研究这种主动行为,团队用电液致动器制造了一种软人工肌肉——一个装有液体且带有薄电极图案的柔性囊袋。施加高电压时,囊袋会鼓起并弯曲,就像收缩的肌肉一样。科学家将一根真实海豹触须(装在软人工毛囊中)连接到该致动器上。该装置可使触须摆动约17度,匹配活体海豹测得的角度,即便在抵抗水流阻力时也能做到。它的响应时间在几百分之一秒级,并能在多次循环中可靠工作,类似天然肌肉的特性。 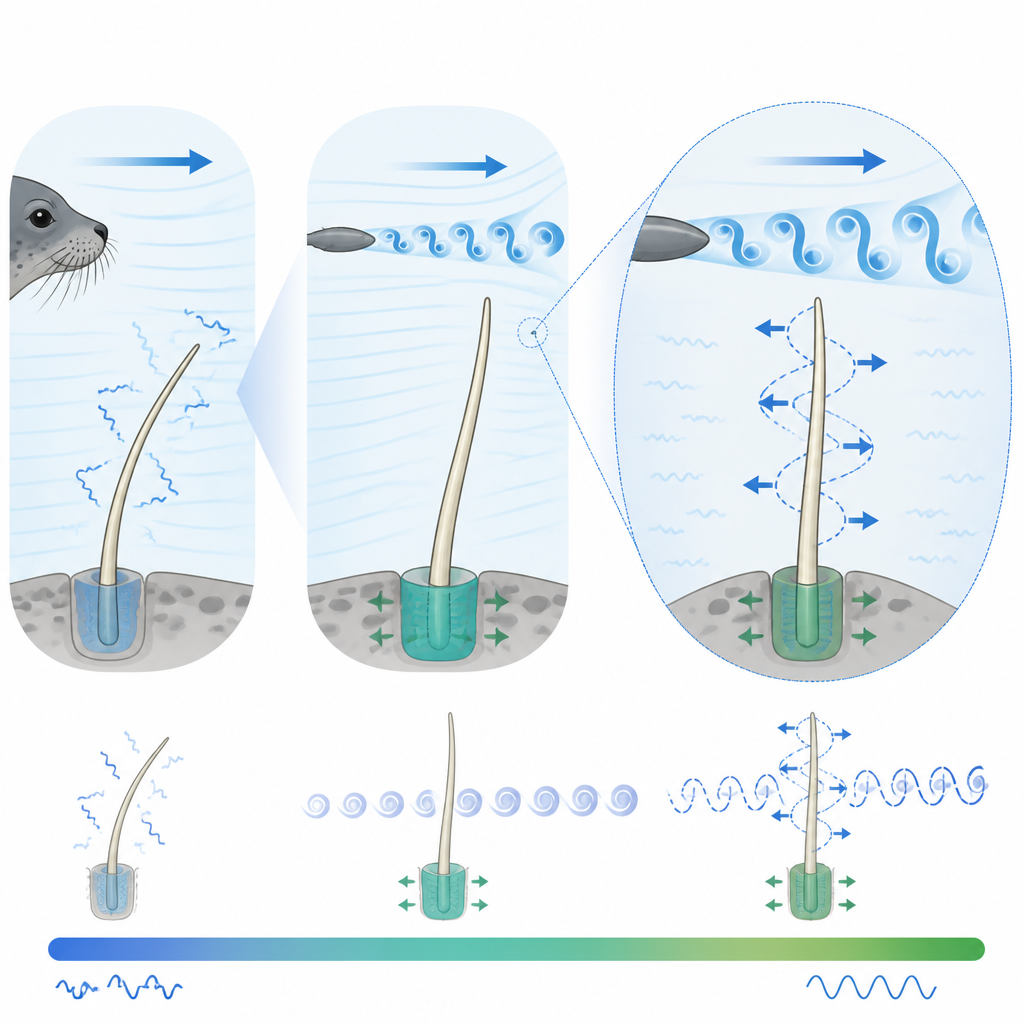
主动摆动使信号更清晰
利用这一仿生装置,团队测量了触须在三种状态下的运动:刚性夹紧、松弛后向(缩回)以及主动向前推进(伸出)。在所有情况下,上游圆柱都会产生类似鱼尾流的重复尾迹。伸出状态给出了最清晰的结果:尾流信号相比刚性状态突出的程度提高了三倍以上,相比缩回状态大约提高两倍。换言之,通过使触须基部变硬并主动将触须推入水流,能显著增强其捕捉猎物尾迹的能力,尽管这可能会让动物付出更高的能量代价。
从单根触须到机器人口鼻
海豹并不只依赖一根触须,因此研究人员构建了一个完整的仿生口鼻,装有60根真实港海豹触须,按面部排列成行。每组触须由软致动器驱动,使阵列能节律性地摆动、保持伸出姿态,或仅对一侧动作以进行方向性感知。这个机器人口鼻展示了将波浪状触须与可控运动结合起来,可以形成一个强大且灵活的“水下摄像机”,有望为未来的水下机器人提供导航与感知能力。
对感知与机器人学的意义
这些实验表明,港海豹触须的波浪形表面和它们的主动向前运动,都是将微弱水迹转化为强烈、可读信号的关键。波浪形表面减少了动物游动时的无用振动,而肌肉驱动的推入动作则提高了猎物尾流与背景噪声之间的对比度。理解并仿制这一自然设计,可能会激发出新型流动传感器和软体机器人系统,使其在黑暗或复杂水域中像捕食的海豹一样熟练地导航和检测目标。
引用: Gupta, C., Krushynska, A.O., Jayawardhana, B. et al. Soft bionic actuation explains the functional role of whisking in seal whisker sensing. npj Flex Electron 10, 62 (2026). https://doi.org/10.1038/s41528-026-00565-1
关键词: 海豹触须, 水下感知, 软体机器人, 主动摆动, 流动检测