Clear Sky Science · es
La actuación biónica blanda explica el papel funcional del movimiento de los bigotes en la detección de las focas
El sentido secreto de las focas bajo el agua
Las focas pueden perseguir peces en aguas oscuras y turbias donde la vista es casi inútil, y aun así seguir los caminos invisibles que dejan sus presas. Este estudio explora cómo la forma y el movimiento especiales de los bigotes de las focas convierten movimientos débiles del agua en señales claras, y cómo los ingenieros construyeron una copia robótica blanda para entender y, algún día, reutilizar esta capacidad en tecnología subacuática. 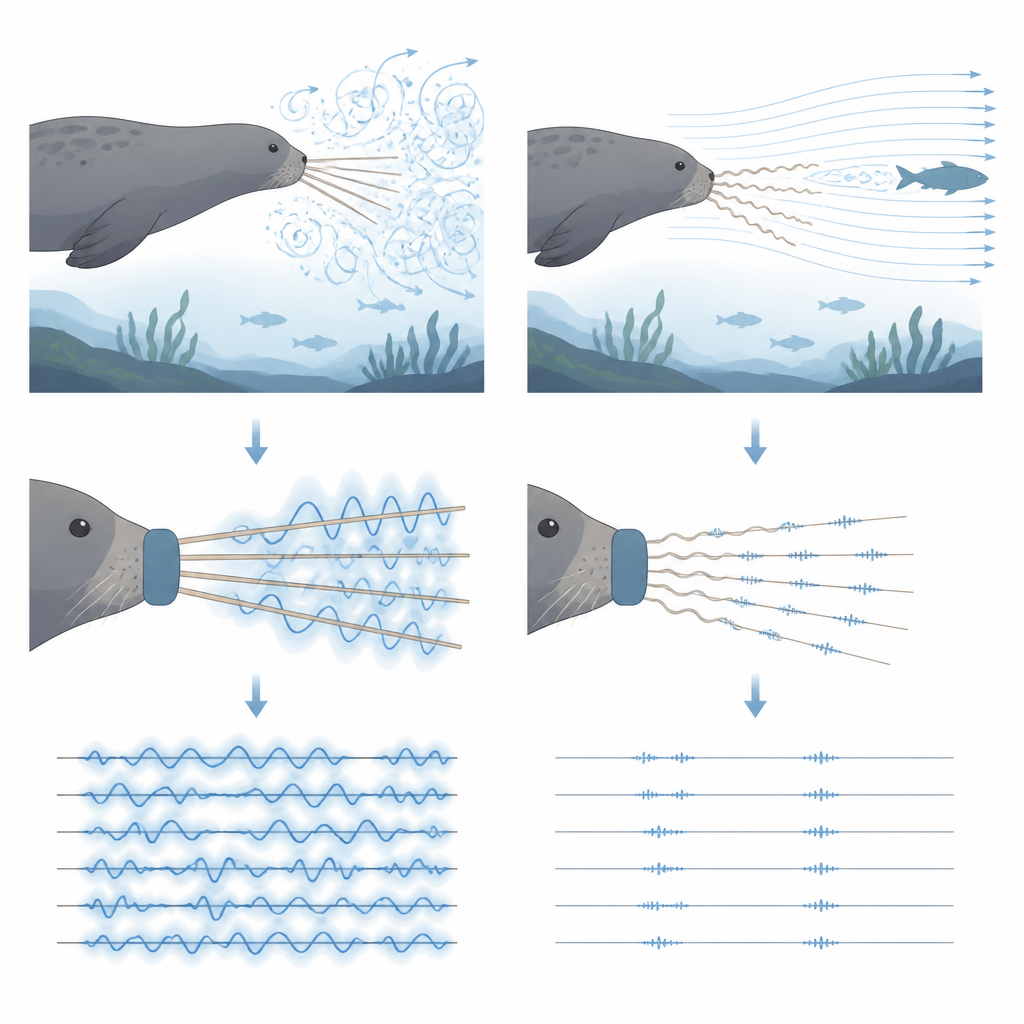
Cómo los bigotes leen el agua
Muchos animales usan el movimiento para sentir su entorno: los murciélagos emiten sonido, mientras que las ratas barren los objetos con sus bigotes. Las focas hacen algo parecido en el agua. Sus bigotes están llenos de nervios y pueden detectar minúsculas ondulaciones creadas por peces en movimiento. Las focas comunes tienen bigotes ondulados y con forma de cuentas, mientras que los leones marinos de California los tienen lisos. Se sospechaba que la forma ondulada calmaba vibraciones indeseadas causadas por el propio nado de la foca, de modo que solo destacara el flujo procedente de la presa. Hasta ahora, sin embargo, la mayoría de las pruebas emplearon modelos rígidos de plástico o trataron los bigotes como palpadores inmóviles, ignorando el hecho de que las focas reales los mueven activamente.
Probando bigotes reales en agua en flujo
Los investigadores compararon bigotes reales de una foca común y de un león marino de California en un túnel de agua. Usando un láser para medir movimientos microscópicos, primero observaron cuánto se agitaba cada bigote cuando solo pasaba un flujo de agua estable. El bigote liso del león marino vibró con fuerza, mientras que el bigote ondulado de la foca común se movió aproximadamente tres veces menos. Cuando el equipo añadió un cilindro corriente arriba para imitar la estela en remolino de un pez, ambos bigotes empezaron a oscilar al ritmo de los vórtices repetidos. Para el bigote de la foca común, la señal útil procedente de esa estela fue más de cincuenta veces más fuerte que el ruido de fondo causado por la vibración autoinducida, mucho mayor que en el caso del bigote del león marino.
Construyendo un músculo artificial blando
En la naturaleza, las focas no mantienen sus bigotes rígidos; los mueven hacia adelante y hacia atrás y los empujan hacia delante cuando detectan presas. Para estudiar este comportamiento activo, el equipo creó un músculo artificial blando utilizando un actuador electrohidráulico, una bolsita flexible llena de líquido y con electrodos finos dispuestos en patrón. Cuando se aplica alto voltaje, la bolsa se abulta y se dobla, como un músculo que se contrae. Los científicos fijaron un bigote real de foca, montado en un folículo artificial blando, a este actuador. El dispositivo pudo mover el bigote unos 17 grados, coincidiendo con los ángulos medidos en focas vivas, incluso mientras resistía la fuerza de arrastre del agua en movimiento. Respondía en unas pocas centésimas de segundo y funcionó de forma confiable a lo largo de muchos ciclos, muy parecido al músculo natural. 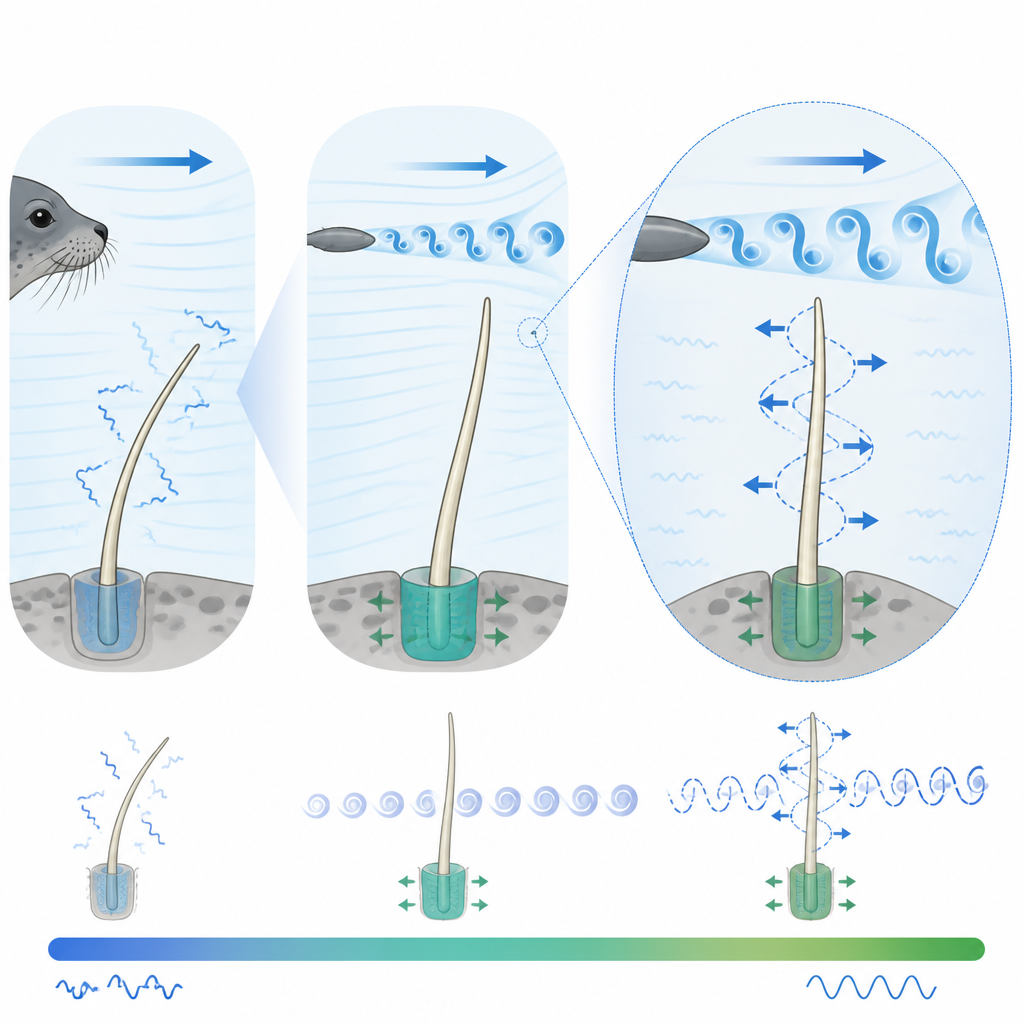
El movimiento activo afina la señal
Con este montaje biónico, el equipo midió el movimiento del bigote en tres estados: rígidamente sujetado, sostenido de forma floja y orientado hacia atrás (retraído), y empujado activamente hacia delante (proyectado). En todos los casos, un cilindro corriente arriba producía una estela repetitiva como la de un pez. El estado proyectado dio el resultado más claro: la señal de la estela destacaba más de tres veces mejor que en el caso rígido, y aproximadamente el doble que en el estado retraído. En otras palabras, empujar activamente el bigote hacia el flujo, endureciendo su base, mejora en gran medida su capacidad para captar rastros de presas, aunque probablemente suponga un mayor gasto energético para el animal.
De un solo bigote a un morro robótico
Las focas no dependen de un solo bigote, por lo que los investigadores construyeron un morro biónico completo con 60 bigotes reales de foca común, dispuestos en filas como en una cara real. Cada grupo de bigotes era impulsado por actuadores blandos, lo que permitía que la matriz barriera rítmicamente, mantuviera una pose proyectada o incluso moviera solo un lado a la vez para la detección direccional. Este morro robótico demuestra que combinar bigotes ondulados con movimiento controlable puede formar una poderosa y flexible “cámara de agua” que podría guiar a futuros robots subacuáticos.
Qué significa esto para la detección y la robótica
En conjunto, los experimentos muestran que tanto la forma ondulada de los bigotes de la foca común como su movimiento activo hacia delante son clave para convertir rastros débiles en el agua en señales fuertes y legibles. La superficie ondulada reduce las oscilaciones inútiles mientras el animal nada, y el empuje impulsado por un «músculo» aumenta el contraste entre la estela de la presa y el ruido de fondo. Entender y copiar este diseño natural podría inspirar nuevos sensores de flujo y sistemas robóticos blandos que naveguen y detecten objetos en aguas oscuras o con obstáculos con la misma destreza que una foca cazadora.
Cita: Gupta, C., Krushynska, A.O., Jayawardhana, B. et al. Soft bionic actuation explains the functional role of whisking in seal whisker sensing. npj Flex Electron 10, 62 (2026). https://doi.org/10.1038/s41528-026-00565-1
Palabras clave: bigotes de foca, detección subacuática, robótica blanda, movimiento activo de bigotes, detección de flujo