Clear Sky Science · ja
柔らかな生体模倣アクチュエーションが解き明かす、アザラシの触ひげ運動の機能的役割
アザラシの秘められた水中感覚
アザラシは視力がほとんど役に立たない暗く濁った水中でも魚を追跡し、獲物が残した目に見えない軌跡に従うことができます。本研究は、アザラシの触ひげの特別な形状と運動がどのように微弱な水の動きを明瞭な信号へと変えるかを探り、その能力を理解して将来の水中技術に応用するためにソフトロボティックな模倣体を制作した経緯を説明します。 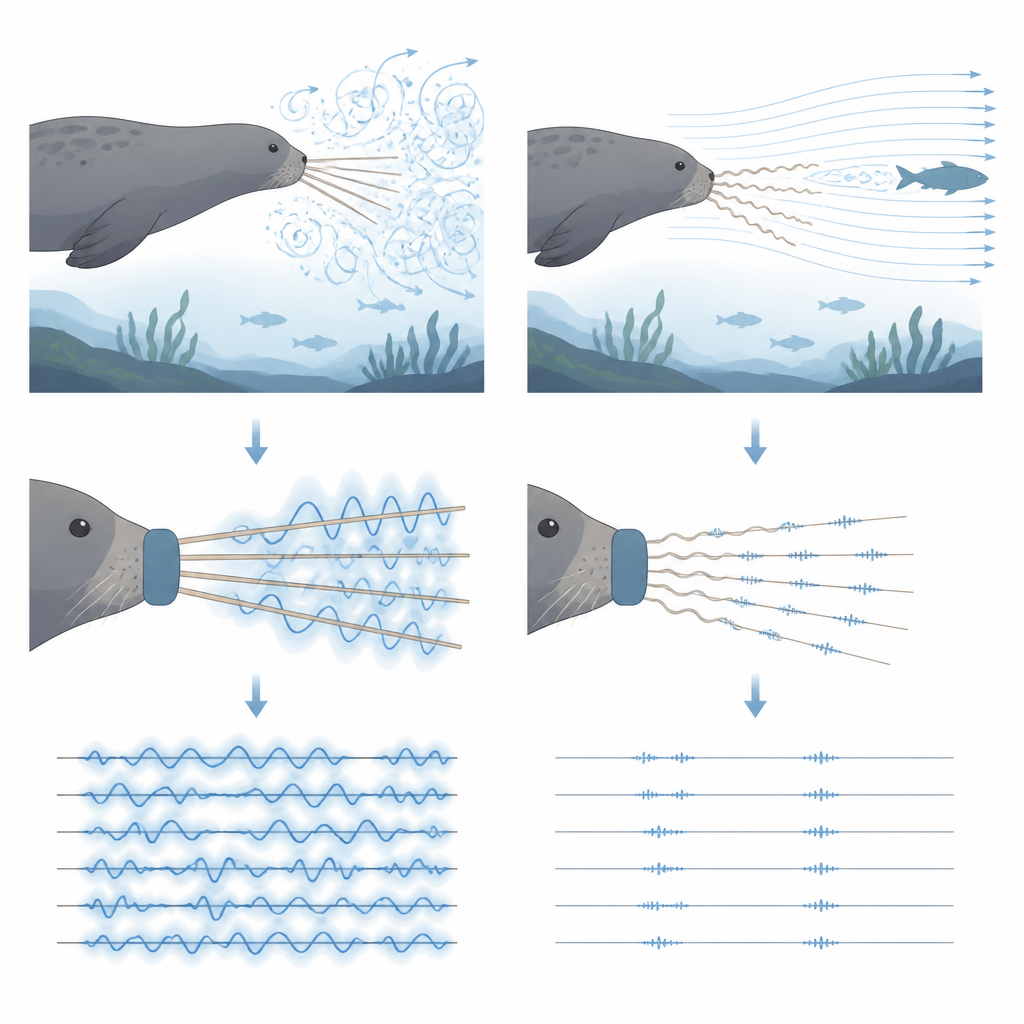
触ひげは水をどう読み取るか
多くの動物は運動を使って世界を感知します:コウモリは音を出し、ネズミは触ひげで物体を掃きます。アザラシは水中で同様のことを行います。触ひげは神経で密に覆われ、泳ぐ魚が作るわずかな波紋を検出できます。イワトビペンギンではなく(笑)、ハーバーアザラシは波打つビーズ状の触ひげを持ち、カリフォルニアアシカは滑らかな触ひげを持ちます。この波状形状は、自身の泳ぎによる不要な振動を抑え、獲物に由来する流れだけを際立たせるのではないかと考えられてきました。しかしこれまでの多くの実験は剛性のプラスチックモデルを使ったり、触ひげを動かない感覚器として扱ったりしており、実際のアザラシが触ひげを能動的に動かすという事実を無視していました。
流れる水中で実際の触ひげを試す
研究者たちはハーバーアザラシとカリフォルニアアシカの実物の触ひげを水槽トンネルで比較しました。レーザーで微小な動きを測定し、まずは定常流だけが流れる状況で各触ひげがどれほど揺れるかを調べました。滑らかなアシカの触ひげは強く振動したのに対し、波状のハーバーアザラシの触ひげはおよそ3分の1ほどしか動きませんでした。次に上流に円柱を置いて魚の渦巻く後流を模したところ、両方の触ひげが繰り返す渦に合わせて揺れ始めました。ハーバーアザラシの触ひげでは、この後流から得られる有用な信号は自己誘起振動という背景雑音よりも50倍以上強く、アシカの触ひげよりはるかに高い比率を示しました。
柔らかな人工筋肉の構築
自然界でアザラシは触ひげをただ固く保持するわけではなく、前後に掃くように動かし、獲物を感知すると前方へ押し出します。この能動的な挙動を研究するために、チームは電気流体アクチュエータを用いた柔らかな人工筋肉を作りました。これは液体を満たした柔らかいポーチに薄い電極を配した構造で、高電圧をかけるとポーチが膨らんで曲がり、収縮する筋肉のように動きます。研究者は実物のアザラシの触ひげを柔らかな人工毛根に取り付け、このアクチュエータに接続しました。装置は触ひげを約17度ほど振ることができ、生きたアザラシで観測される角度と一致し、水の抵抗にも耐えつつ動作しました。応答時間は数百分の一秒で、多数のサイクルに渡って信頼性よく機能し、自然の筋肉に似た特性を示しました。 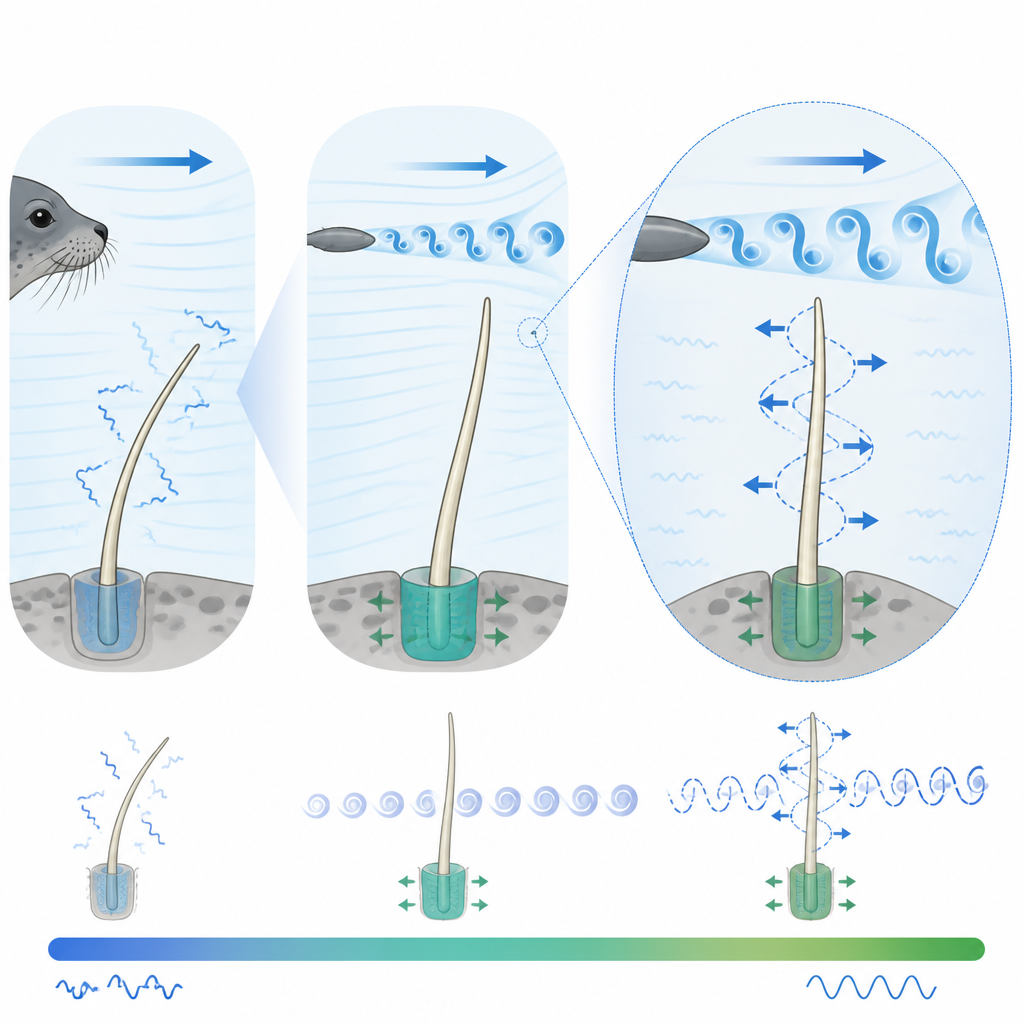
能動的な触ひげ運動が信号を鮮鋭化する
このバイオニックなセットアップを用いて、チームは触ひげの動きを三つの状態で計測しました:剛固に固定した状態、緩く保持して後方に引いた(引いた状態)、そして能動的に前方へ押し出した(突出した状態)。いずれの状態でも上流の円柱は魚からのような繰り返す後流を発生させました。突出状態が最も明瞭な結果をもたらしました:後流からの信号は剛固に固定した場合よりも3倍以上際立ち、引いた状態よりもおよそ2倍良好でした。つまり、触ひげの基部を硬くして流れの中に能動的に押し込むことで、獲物の残す後流を検出する能力が大幅に向上する一方で、動物にとってはより多くのエネルギーを消費する可能性が高いことを示しています。
単一の触ひげからロボット用マズルへ
アザラシは単一の触ひげだけに頼るわけではないため、研究者たちは実際の顔の列に並んだ60本のハーバーアザラシ触ひげを搭載した完全なバイオニック・マズルを制作しました。触ひげの各群は柔らかなアクチュエータで駆動され、配列全体がリズミカルに掃くことも、突出した姿勢を保つことも、一方のみを動かして方向検知を行うことも可能です。このロボティック・マズルは、波状の触ひげと制御可能な運動を組み合わせることで、将来の水中ロボットを導く強力で柔軟な“水中カメラ”を形成し得ることを示しています。
センシングとロボティクスへの示唆
一連の実験は、ハーバーアザラシの触ひげの波状形状と能動的な前方運動の両方が、微弱な水跡を強く読み取りやすい信号へと変える鍵であることを示しています。波状表面は泳ぐときの不要な振動を減らし、筋肉で押し込むような動きは獲物の後流と背景雑音とのコントラストを高めます。この自然設計を理解し模倣することで、暗く乱れた水中でも狩りをするアザラシと同様の巧みさで物体を検知・航行できる新しい流れセンサやソフトロボティクスシステムの開発に道を開くでしょう。
引用: Gupta, C., Krushynska, A.O., Jayawardhana, B. et al. Soft bionic actuation explains the functional role of whisking in seal whisker sensing. npj Flex Electron 10, 62 (2026). https://doi.org/10.1038/s41528-026-00565-1
キーワード: アザラシの触ひげ, 水中センシング, ソフトロボティクス, 能動的な触ひげ運動, 流れ検出