Clear Sky Science · nl
Zachte bionische aandrijving verklaart de functionele rol van snorharen bij robben in de waarneming onder water
Het verborgen zintuig van een robbe onder water
Robben kunnen vissen achtervolgen in donker, troebel water waar zicht bijna nutteloos is, maar toch de onzichtbare paden volgen die hun prooi achterlaat. Deze studie onderzoekt hoe de speciale vorm en beweging van robbensnorharen zwakke waterbewegingen in duidelijke signalen veranderen, en hoe ingenieurs een zachte robotkop bouwden om deze vaardigheid te begrijpen en mogelijk toe te passen in onderwatertoepassingen. 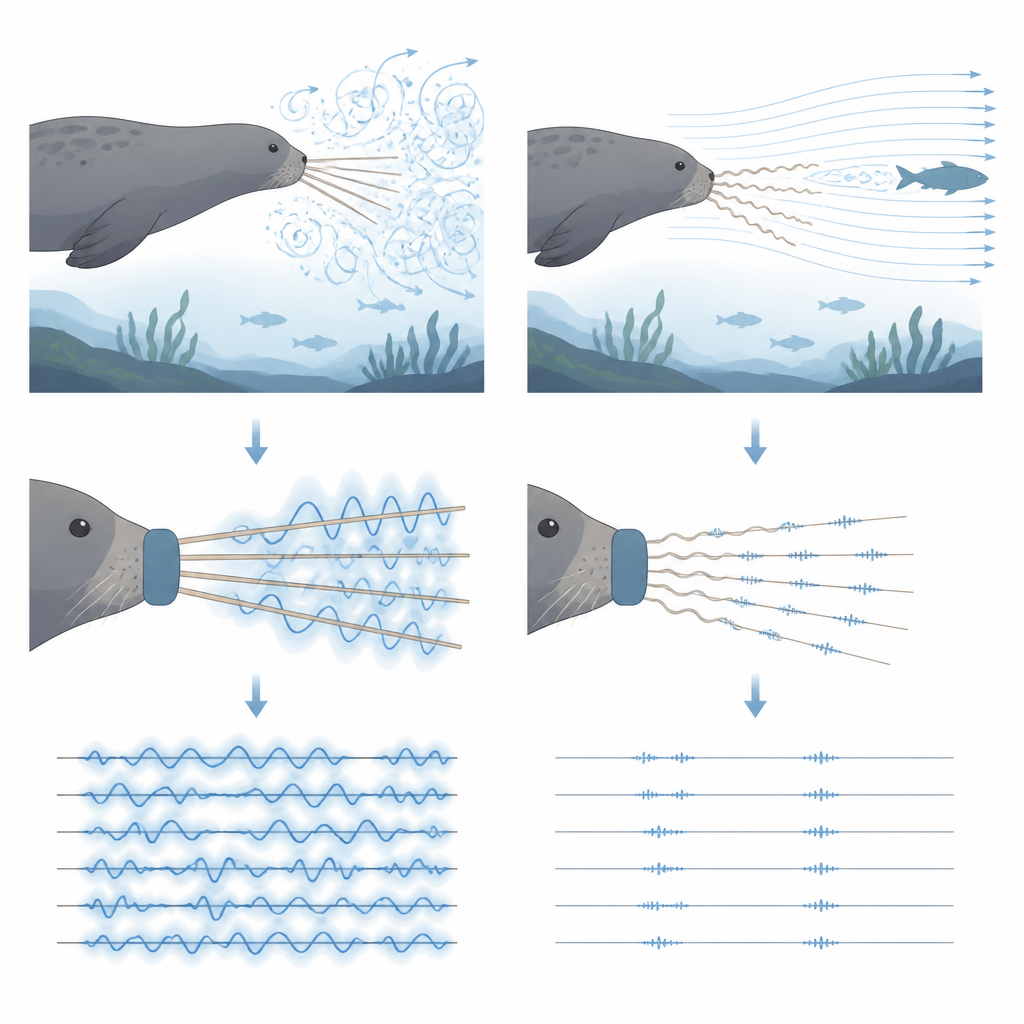
Hoe snorharen het water lezen
Veel dieren gebruiken beweging om hun omgeving waar te nemen: vleermuizen zenden geluid uit, terwijl ratten hun snorharen over objecten vegen. Robben doen iets vergelijkbaars in water. Hun snorharen zitten vol zenuwen en kunnen tiny trillingen detecteren die door zwemmende vissen worden veroorzaakt. Gewone zeehonden hebben golvende, kralenachtige snorharen, terwijl californische zeeleeuwen gladde snorharen hebben. Er werd gesuggereerd dat de golvende vorm ongewenste vibraties veroorzaakt door het zwemmen van de robbe dempt, zodat alleen de stroom van prooien opvalt. Tot nu toe gebruikten de meeste tests echter starre plastic modellen of werden de snorharen als onbeweeglijke voelers behandeld, zonder rekening te houden met het feit dat echte robben ze actief bewegen.
Reële snorharen testen in stromend water
De onderzoekers vergeleken echte snorharen van een gewone zeehond en een californische zeeleeuw in een watertunnel. Met een laser om microscopische bewegingen te meten, bekeken ze eerst hoeveel elke snorhaar trilde bij alleen een constante waterstroom. De gladde zeeleeuwsnoorhaar trilde sterk, terwijl de golvende snorhaar van de gewone zeehond ongeveer drie keer minder bewoog. Toen het team stroomopwaarts een cilinder toevoegde om de draaikolk van een vis na te bootsen, begonnen beide snorharen met de herhalende vortices mee te deinen. Voor de golvende snorhaar van de gewone zeehond was het bruikbare signaal van deze wake meer dan vijftig keer sterker dan de achtergrondruis van zelfveroorzaakte trillingen, veel hoger dan bij de zeeleeuwsnoorhaar.
Een zachte kunstmatige spier bouwen
In het wild houden robben hun snorharen niet stijf; ze bewegen ze heen en weer en duwen ze naar voren wanneer ze prooi voelen. Om dit actieve gedrag te bestuderen, maakte het team een zachte kunstmatige spier met een elektrohydraulische actuator, een flexibele zak gevuld met vloeistof en gepatroonde dunne elektroden. Wanneer er een hoge spanning wordt aangelegd, bolt de zak op en buigt hij, net als een samentrekkende spier. De wetenschappers bevestigden een echte robbensnorhaar, geplaatst in een zachte kunstmatige follikel, aan deze actuator. Het apparaat kon de snorhaar ongeveer 17 graden laten zwaaien, overeenkomend met de hoeken gemeten bij levende robben, zelfs terwijl het de weerstand van stromend water weerstond. Het reageerde binnen enkele honderdsten van een seconde en werkte betrouwbaar over vele cycli, vergelijkbaar met natuurlijke spieren. 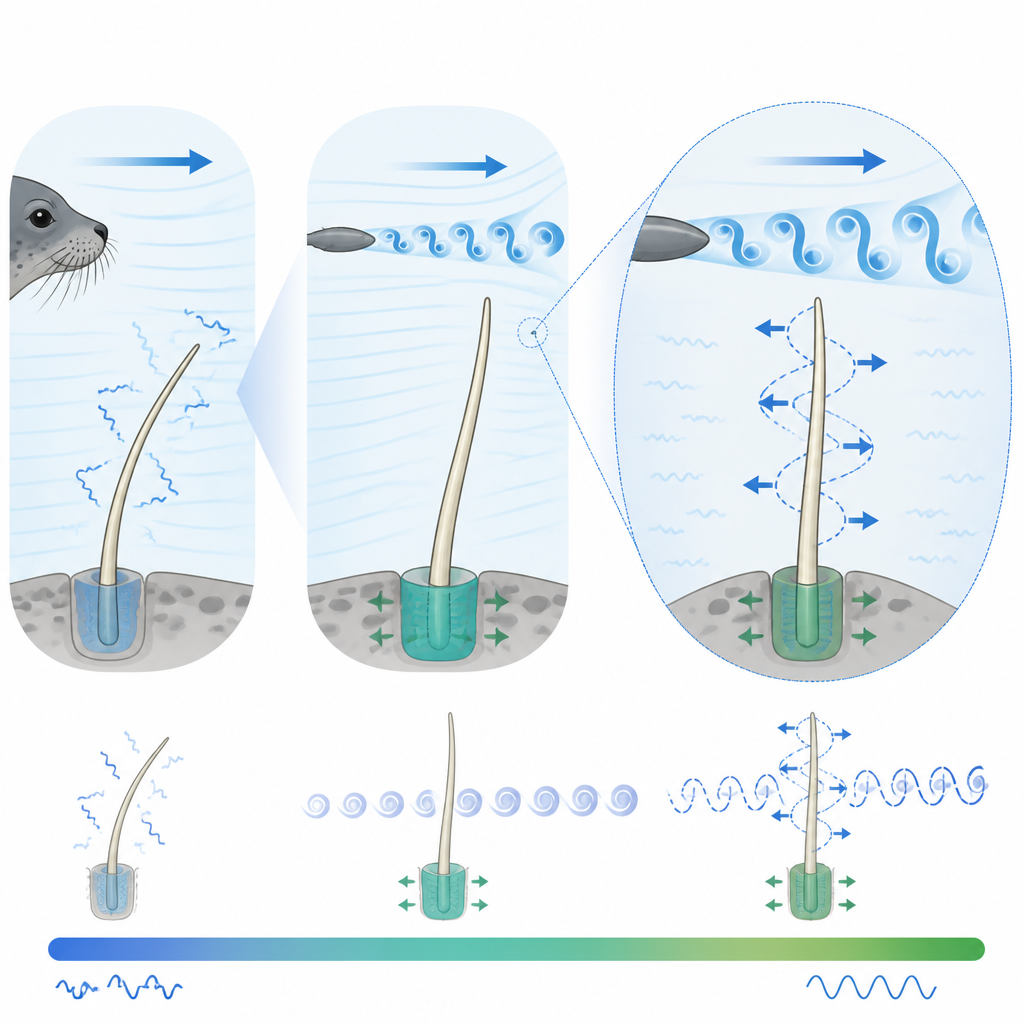
Actief 'whisken' scherpt het signaal
Met deze bionische opstelling maten de onderzoekers de beweging van de snorhaar in drie toestanden: star vastgezet, los gehouden en naar achteren gekanteld (teruggetrokken), en actief naar voren geduwd (geprotracteerd). In alle gevallen produceerde een stroomopwaartse cilinder een herhalende wake zoals die van een vis. De geprotracteerde toestand gaf het duidelijkste resultaat: het signaal van de wake stak meer dan drie keer beter af dan in het starre geval, en ongeveer twee keer beter dan in de teruggetrokken toestand. Met andere woorden, door de snorhaar actief in de stroom te duwen en de basis te verstevigen, verbetert de gevoeligheid voor prooisporen sterk, hoewel dit waarschijnlijk meer energie kost voor het dier.
Van enkele snorhaar naar robotneus
Robben vertrouwen niet op één snorhaar, dus bouwden de onderzoekers een volledige bionische muil met 60 echte snorharen van de gewone zeehond, gerangschikt in rijen zoals op een echt gezicht. Elke groep snorharen werd aangedreven door zachte actuatoren, waardoor de array ritmisch kon ‘whisken’, een geprotracteerde houding kon vasthouden, of zelfs slechts één kant tegelijk kon bewegen voor richtingdetectie. Deze robotneus toont aan dat het combineren van golvende snorharen met bestuurbare beweging een krachtig, flexibel “watercamera”-systeem kan vormen dat toekomstige onderwaterrobots kan aansturen.
Betekenis voor waarneming en robotica
De experimenten laten samen zien dat zowel de golvende vorm van gewone zeehondsnorharen als hun actieve voorwaartse beweging cruciaal zijn om zwakke watersporen om te zetten in sterke, leesbare signalen. Het golvende oppervlak vermindert nutteloze trillingen tijdens het zwemmen, en de spiergedreven duw in de stroom vergroot het contrast tussen de wake van prooi en achtergrondruis. Het begrijpen en nabootsen van dit natuurlijke ontwerp kan nieuwe flow-sensoren en zachte robotsystemen inspireren die net zo vaardig navigeren en objecten detecteren in donkere of rommelige wateren als een jachtende robbe.
Bronvermelding: Gupta, C., Krushynska, A.O., Jayawardhana, B. et al. Soft bionic actuation explains the functional role of whisking in seal whisker sensing. npj Flex Electron 10, 62 (2026). https://doi.org/10.1038/s41528-026-00565-1
Trefwoorden: robbensnorharen, waarneming onder water, soft robotics, actief 'whisken', flowdetectie