Clear Sky Science · ru
Мягкая бионическая активация объясняет функциональную роль щетинок в восприятии у тюленей
Секретное подводное чувство тюленя
Тюлени могут преследовать рыбу в темной, мутной воде, где зрение почти бесполезно, и при этом следовать невидимым траекториям, оставленным добычей. В этом исследовании разбирают, как особая форма и движение щетинок тюленя превращают слабые водные возмущения в отчетливые сигналы, и как инженеры создали мягкую роботизированную копию, чтобы понять эту способность и однажды применить её в подводных технологиях. 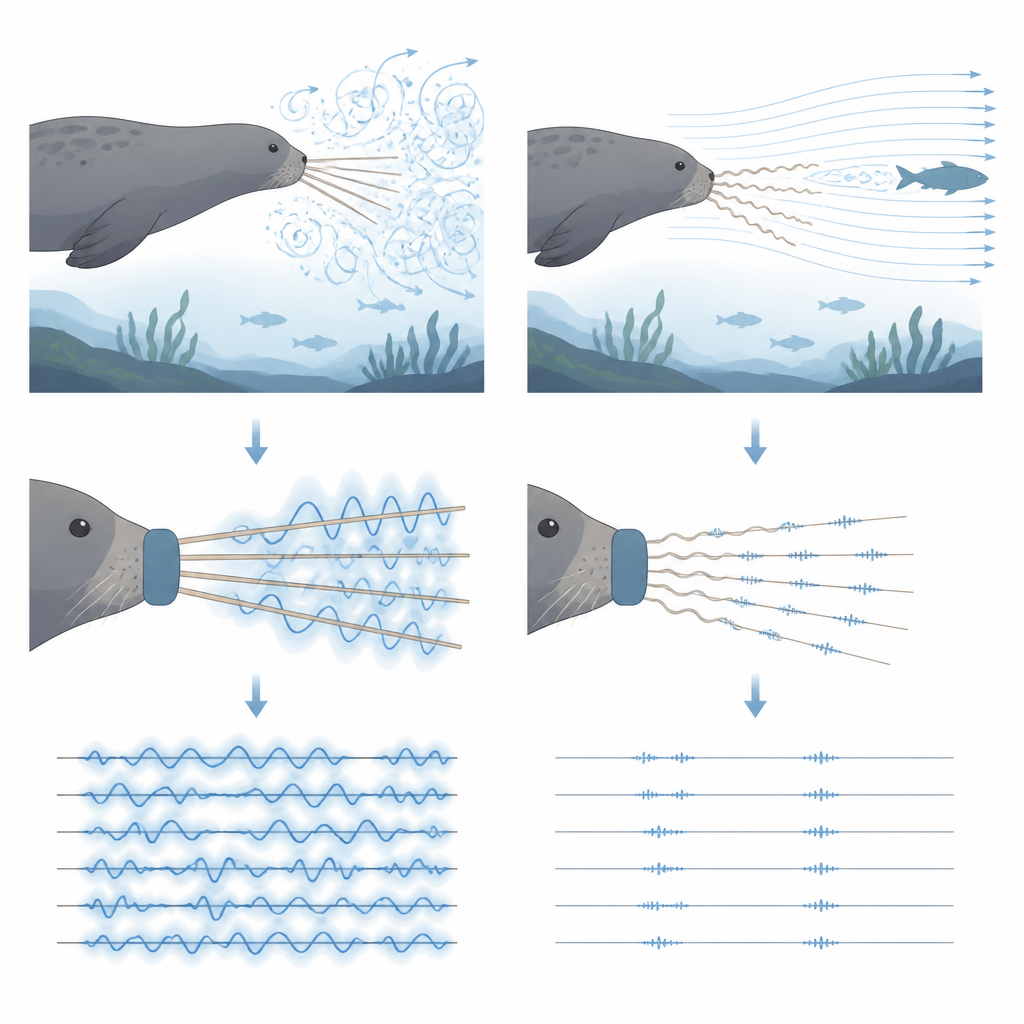
Как щетинки «читают» воду
Многие животные используют движение для восприятия мира: летучие мыши посылают звук, крысы водят усами по объектам. Тюлени делают нечто похожее в воде. Их щетинки насыщены нервными окончаниями и могут улавливать крошечные рябьки, создаваемые плавающей рыбой. У обыкновенных тюленей (harbor seal) щетинки волнистые и бусинчатые, а у калифорнийских морских львов — гладкие. Предполагали, что волнистая форма подавляет нежелательные вибрации, возникающие при собственном плавании животного, так что в поле зрения остаются только следы добычи. До сих пор большинство испытаний проводили на жестких пластиковых моделях или рассматривали щетинки как неподвижные осязательные органы, не учитывая, что настоящие тюлени активно ими двигают.
Испытания реальных щетинок в потоке воды
Исследователи сравнили настоящие щетинки обыкновенного тюленя и калифорнийского морского льва в водном туннеле. С помощью лазера, измеряющего микроскопические движения, они сначала оценили, насколько каждая щетинка вибрирует при наличии только стабильного потока. Гладкая щетинка морского льва сильно вибрировала, тогда как волнистая щетинка тюленя двигалась примерно в три раза меньше. Когда команда установила цилиндр выше по потоку, имитирующий завихрения от рыбы, обе щетинки начали раскачиваться в такт повторяющимся вихрям. Для щетинки обыкновенного тюленя полезный сигнал от этого следа оказался более чем в пятьдесят раз сильнее фонового шума от собственных колебаний — намного выше, чем у щетинки морского льва.
Создание мягкой искусственной «мышцы»
В природе тюлени не просто держат щетинки жестко; они активно двигают ими — машут их туда-сюда и выдвигают вперед, когда чувствуют добычу. Чтобы изучить это активное поведение, команда создала мягкий искусственный «мышечный» привод на базе электроводярного (электрогидравлического) актуатора — гибкого мешочка, заполненного жидкостью и с нанесенными тонкими электродами. При подаче высокого напряжения мешочек выпячивается и изгибается, подобно сокращающейся мышце. Ученые прикрепили настоящую щетинку тюленя, закрепленную в мягком искусственном фолликуле, к этому актуатору. Устройство могло поворачивать щетинку примерно на 17 градусов, соответствуя углам, измеренным у живых тюленей, даже при сопротивлении со стороны потока воды. Оно реагировало за доли секунды и надежно работало в многочисленных циклах, очень похоже на природную мышцу. 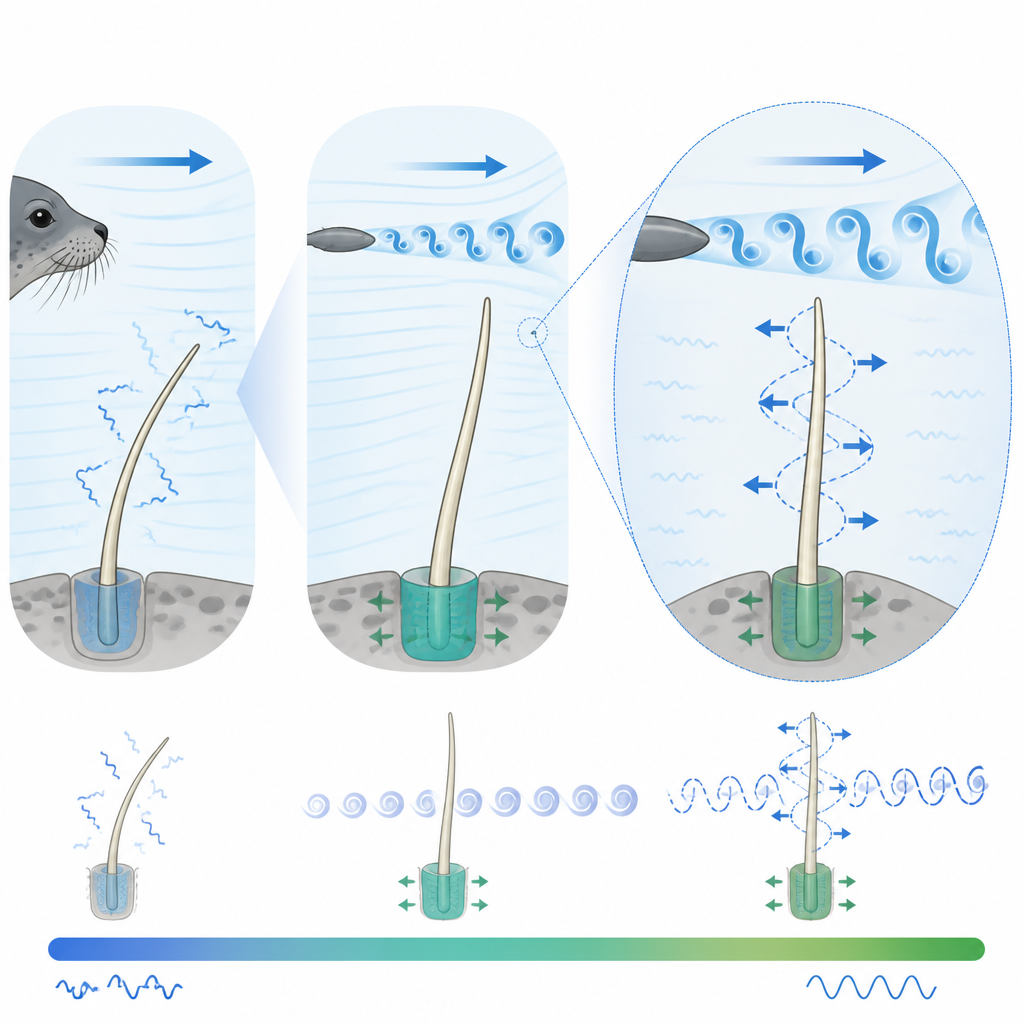
Активное выдвигание щетинок улучшает сигнал
С этой бионической установкой команда измеряла движение щетинки в трех состояниях: жестко зафиксированное, слабо зажатое и отведенное назад (ретракция), и активно выдвинутое вперед (прорекция). В каждом случае выше по потоку цилиндр создавал повторяющийся след, похожий на рыбий. Прорекция давала наиболее четкий результат: сигнал от следа выделялся более чем в три раза лучше, чем в случае с жесткой фиксацией, и примерно в два раза лучше, чем в отведенном состоянии. Иными словами, активное продвижение щетинки в поток, за счет жёсткости основания, значительно улучшает её способность обнаруживать следы добычи, хотя, вероятно, это требует больших энергетических затрат для животного.
От одиночной щетинки к роботизированному «музлу»
Тюлени не полагаются на одну щетинку, поэтому исследователи создали полный бионический «музл», несущий 60 настоящих щетинок обыкновенного тюленя, расположенных рядами, как на реальной морде. Каждой группой щетинок управляли мягкие приводы, что позволяло массиву ритмично «выщипывать», удерживать выдвинутое положение или даже двигать только одну сторону для направленного восприятия. Этот роботизированный музл демонстрирует, что сочетание волнистых щетинок с управляемым движением может образовать мощную, гибкую «водную камеру», способную направлять будущие подводные роботы.
Что это значит для сенсорики и робототехники
В совокупности эксперименты показывают, что как волнистая форма щетинок обыкновенного тюленя, так и их активное выдвижение вперед являются ключевыми для превращения слабых водных следов в сильные, читаемые сигналы. Волнистая поверхность уменьшает бесполезные вибрации во время плавания, а «мышечное» выталкивание в поток увеличивает контраст между следом добычи и фоновым шумом. Понимание и копирование этой природной конструкции может вдохновить новые датчики потока и системы мягкой робототехники, которые будут ориентироваться и обнаруживать объекты в темной или загроможденной воде так же искусно, как охотящийся тюлень.
Цитирование: Gupta, C., Krushynska, A.O., Jayawardhana, B. et al. Soft bionic actuation explains the functional role of whisking in seal whisker sensing. npj Flex Electron 10, 62 (2026). https://doi.org/10.1038/s41528-026-00565-1
Ключевые слова: щетинки тюленя, подводное восприятие, мягкая робототехника, активное «выщипывание» щетинок, обнаружение потока