Clear Sky Science · fr
L’actionnement bionique souple explique le rôle fonctionnel du fouettement des vibrisses chez les phoques
Le sens secret des phoques sous l’eau
Les phoques peuvent chasser des poissons dans une eau sombre et trouble où la vue est presque inutile, et pourtant suivre les trajectoires invisibles laissées par leurs proies. Cette étude examine comment la forme et le mouvement particuliers des vibrisses transforment de faibles mouvements d’eau en signaux nets, et comment des ingénieurs ont construit une copie robotique souple pour comprendre et, un jour, réutiliser cette capacité dans la technologie sous-marine. 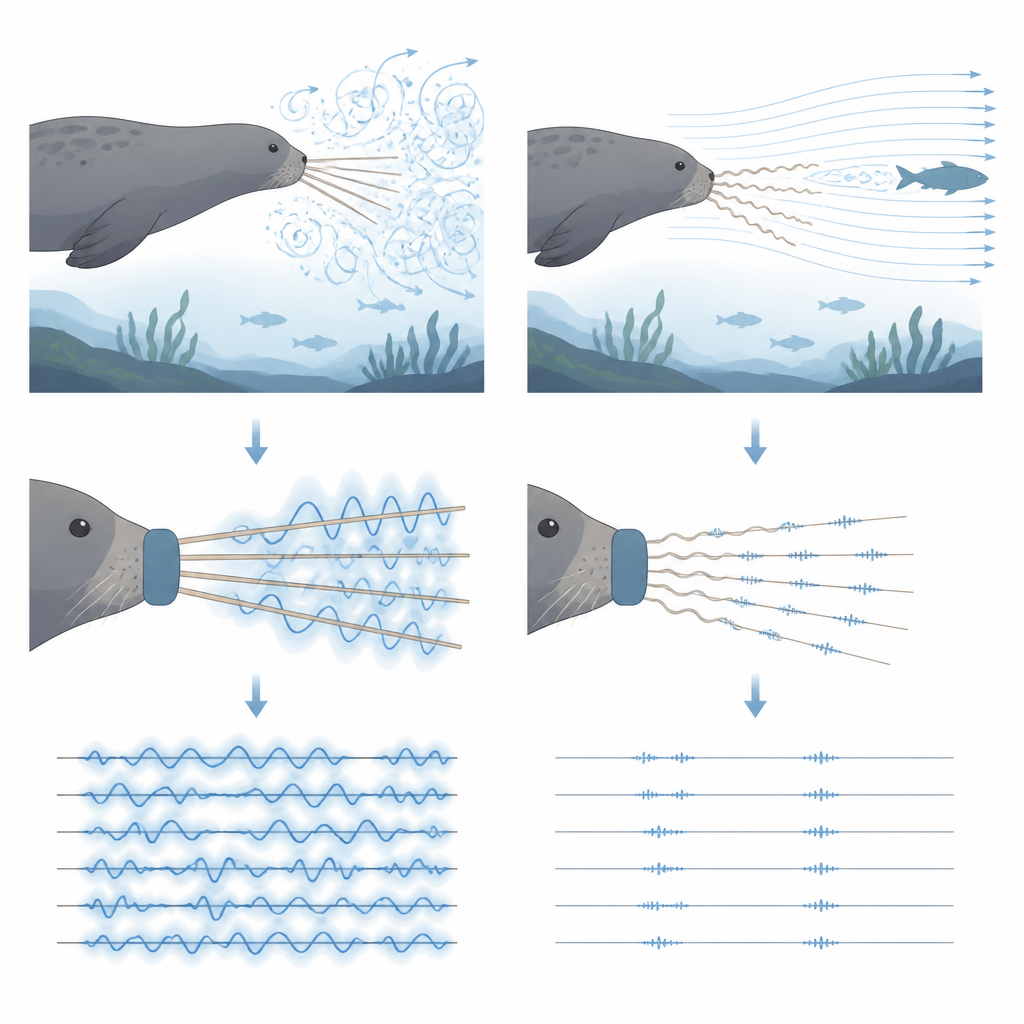
Comment les vibrisses lisent l’eau
De nombreux animaux utilisent le mouvement pour sonder leur environnement : les chauves-souris émettent des sons, tandis que les rats balaient les objets avec leurs moustaches. Les phoques font quelque chose de similaire dans l’eau. Leurs vibrisses sont riches en nerfs et peuvent détecter de minuscules ondulations créées par des poissons en mouvement. Les phoques communs ont des vibrisses ondulées et perlées, tandis que les otaries de Californie ont des vibrisses lisses. On supposait que la forme ondulée réduisait les vibrations indésirables générées par la nage de l’animal, de sorte que seul l’écoulement lié à la proie ressorte. Jusqu’à présent, toutefois, la plupart des tests utilisaient des modèles en plastique rigide ou traitaient les vibrisses comme des capteurs immobiles, en ignorant le fait que les phoques les bougent activement.
Tester de vraies vibrisses dans un courant
Les chercheurs ont comparé de vraies vibrisses d’un phoque commun et d’une otarie de Californie dans un tunnel hydrodynamique. À l’aide d’un laser pour mesurer des mouvements microscopiques, ils ont d’abord observé combien chaque vibrisse tremblait lorsque seul un écoulement d’eau stable passait. La vibrisse lisse de l’otarie vibrait fortement, tandis que la vibrisse ondulée du phoque bougeait environ trois fois moins. Lorsque l’équipe a ajouté un cylindre en amont pour imiter le sillage tourbillonnant d’un poisson, les deux vibrisses ont commencé à osciller en phase avec les vortex répétés. Pour la vibrisse du phoque commun, le signal utile provenant de ce sillage était plus de cinquante fois plus fort que le bruit de fond dû aux oscillations auto-induites, bien supérieur à celui de l’otarie.
Construire un muscle artificiel souple
Dans la nature, les phoques ne tiennent pas simplement leurs vibrisses raides ; ils les fouettent d’un côté à l’autre et les poussent vers l’avant quand ils sentent une proie. Pour étudier ce comportement actif, l’équipe a créé un muscle artificiel souple utilisant un actionneur électrohydraulique, une poche flexible remplie de liquide et bordée d’électrodes fines. Quand une haute tension est appliquée, la poche gonfle et se plie, à la manière d’un muscle qui se contracte. Les scientifiques ont fixé une vraie vibrisse de phoque, logée dans un follicule artificiel souple, à cet actionneur. Le dispositif pouvait balancer la vibrisse d’environ 17 degrés, correspondant aux angles mesurés chez des phoques vivants, tout en résistant à la traînée de l’eau en mouvement. Il répondait en quelques centièmes de seconde et fonctionnait de façon fiable sur de nombreux cycles, à l’image d’un muscle naturel. 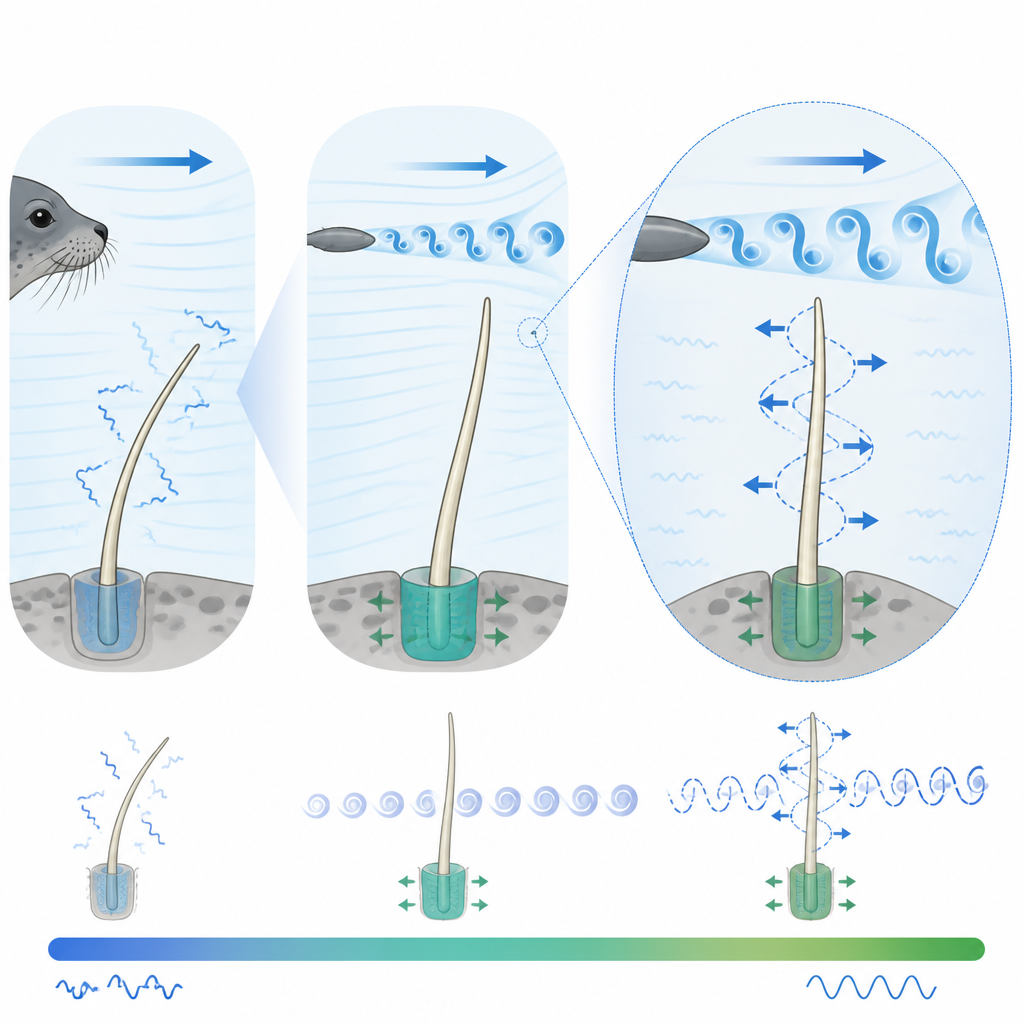
Le fouettement actif affine le signal
Avec ce dispositif bionique, l’équipe a mesuré le mouvement des vibrisses dans trois états : rigidement serrées, maintenues lâchement et orientées vers l’arrière (rétractées), et poussées activement vers l’avant (protractées). Dans tous les cas, un cylindre en amont produisait un sillage répétitif comme celui d’un poisson. L’état protracté a donné le résultat le plus net : le signal du sillage ressortait plus de trois fois mieux que dans le cas rigide, et à peu près deux fois mieux que dans l’état rétracté. En d’autres termes, pousser activement la vibrisse dans l’écoulement, en rigidifiant sa base, améliore grandement sa capacité à capter les traces de proies, bien que cela coûte probablement plus d’énergie à l’animal.
De la vibrisse unique au museau robotique
Les phoques ne comptent pas sur une seule vibrisse, aussi les chercheurs ont construit un museau bionique complet portant 60 vraies vibrisses de phoque commun, disposées en rangées comme sur un vrai visage. Chaque groupe de vibrisses était actionné par des actionneurs souples, permettant à l’ensemble de fouetter rythmiquement, de maintenir une pose protractée, ou même de ne bouger qu’un côté à la fois pour une détection directionnelle. Ce museau robotique montre que combiner des vibrisses ondulées et un mouvement contrôlable peut former une puissante et flexible « caméra aquatique » susceptible de guider les robots sous-marins de demain.
Ce que cela signifie pour la détection et la robotique
Ensemble, les expériences montrent que la forme ondulée des vibrisses du phoque commun et leur mouvement actif vers l’avant sont essentiels pour transformer de faibles sillages en signaux forts et lisibles. La surface ondulée réduit les secousses inutiles pendant la nage, et la poussée musculaire dans l’écoulement augmente le contraste entre le sillage de la proie et le bruit de fond. Comprendre et copier ce design naturel pourrait inspirer de nouveaux capteurs d’écoulement et des systèmes robotiques souples capables de naviguer et de détecter des objets dans des eaux sombres ou encombrées aussi habilement qu’un phoque chasseur.
Citation: Gupta, C., Krushynska, A.O., Jayawardhana, B. et al. Soft bionic actuation explains the functional role of whisking in seal whisker sensing. npj Flex Electron 10, 62 (2026). https://doi.org/10.1038/s41528-026-00565-1
Mots-clés: vibrisses de phoque, détection sous-marine, robotique souple, fouettement actif, détection d’écoulement