Clear Sky Science · tr
Gözetimsiz etki alanı uyarlamalı nesne algılama için prototip‑yönelimli kontrastif ortalama‑öğretmen
Bilgisayarlara Yeni Ortamlarda Nesneleri Tanıtmayı Öğretmek
Modern yapay zeka sistemleri, fotoğraflarda arabaları, insanları ve sokak tabelalarını etkileyici bir doğrulukla tespit edebiliyor—ta ki çevre değişene kadar. Güneşli şehir sokaklarında eğitilmiş bir algılayıcı, sis, gece veya stilize edilmiş sanat eserlerinde başarısız olabilir. Bu makale, bu sistemlerin içinde “öğretmeni öğretmenin” yeni bir yolunu tanıtıyor; böylece insanlar tarafından çizilmiş yeni kutulara ihtiyaç duymadan yeni koşullara kendilerini uyarlayabiliyorlar.
Nesne Algılayıcıların Dünyanın Değiştiğinde Neden Zorlandığı
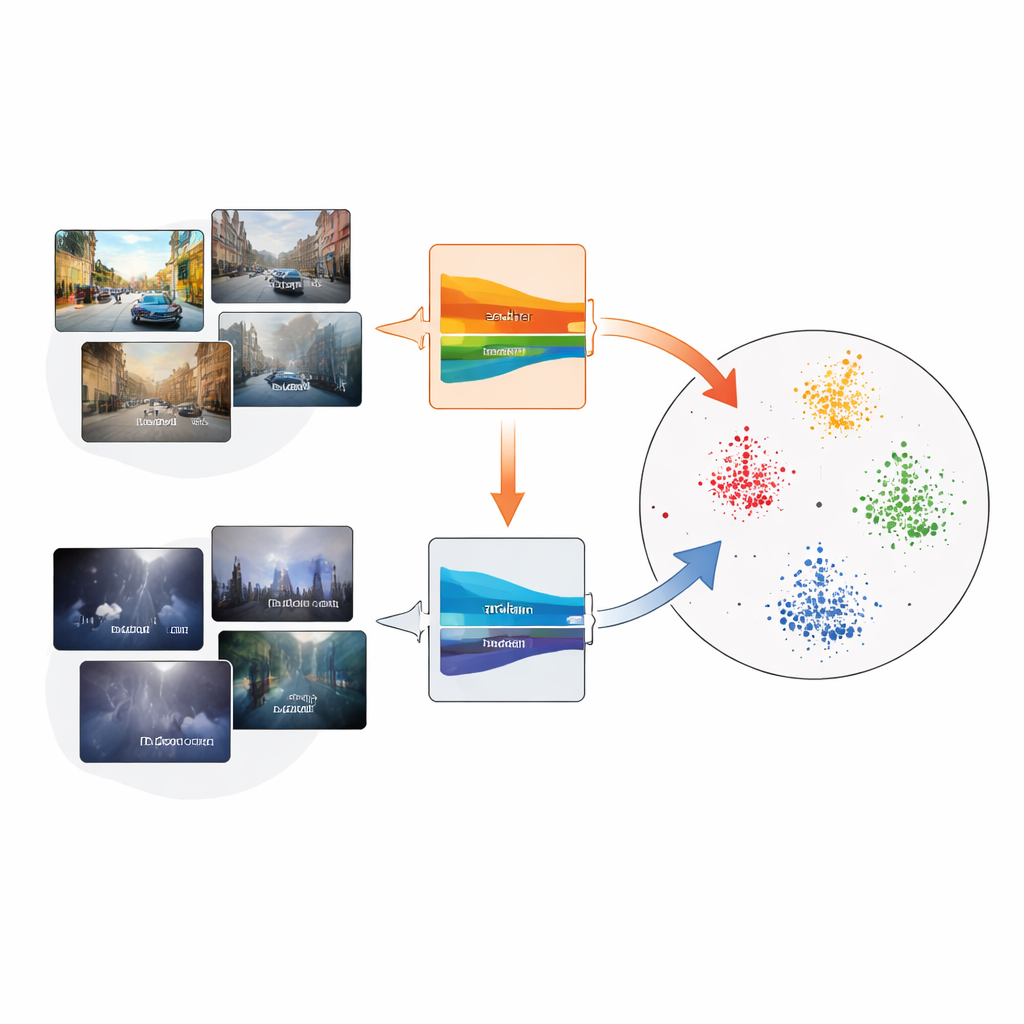
Nesne algılama, her bir araba, otobüs veya bisikletin dikkatle kutulandığı geniş etiketli görüntü koleksiyonlarına dayanır. Ancak gerçek dünya kameraları nadiren bu eğitim koşullarına tam olarak uyar. Farklı hava durumu, aydınlatma veya kamera türleri nesnelerin görünümünü değiştirir—bu olgu etki alanı kayması olarak bilinir. Bu gerçekleştiğinde, örneğin açık gündüz trafik sahnelerinde eğitilmiş algılayıcılar sisli otoyollarda veya gece sürüşlerinde kötü sonuç verebilir. Her yeni koşul için taze etiketler toplamak pahalıdır; bu yüzden araştırmacılar yalnızca yeni etki alanından etiketlenmemiş veriyi kullanarak algılayıcıları uyarlayan yöntemler arıyorlar.
İçinde Rehberi Olan Bir Öz‑Öğreten Sistem
Yaygın bir strateji, modelin kendini öğretmesine izin vermektir. Öğrenci ağının düzgünleştirilmiş bir versiyonu olarak oluşturulan bir “öğretmen” ağı, etiketlenmemiş hedef görüntülerde kutular tahmin eder; bu tahminlere sahte‑etiketler denir ve ardından öğrenci bunlarla eğitilir. Zamanla öğrenci gelişir ve öğretmen, öğrencinin ağırlıklarının hareketli ortalaması olarak güncellenir. Ancak erken dönemdeki sahte‑etiketler yanlışsa—örneğin yoğun sise düşen nesneleri kaçırmak gibi—hatalar birikebilir. Yazarlar, bu öz‑eğitimi kararlı hale getirmek için üç fikrin birleştirilebileceğini gösterir: bir ortalama‑öğretmen düzeni, ilişkili özellikleri yakınlaştırıp diğerlerini uzaklaştıran kontrastif öğrenme ve her nesne kategorisini özetleyen sıkı “prototipler”.
Özellik Uzayında İşaret Noktaları Olarak Prototipler
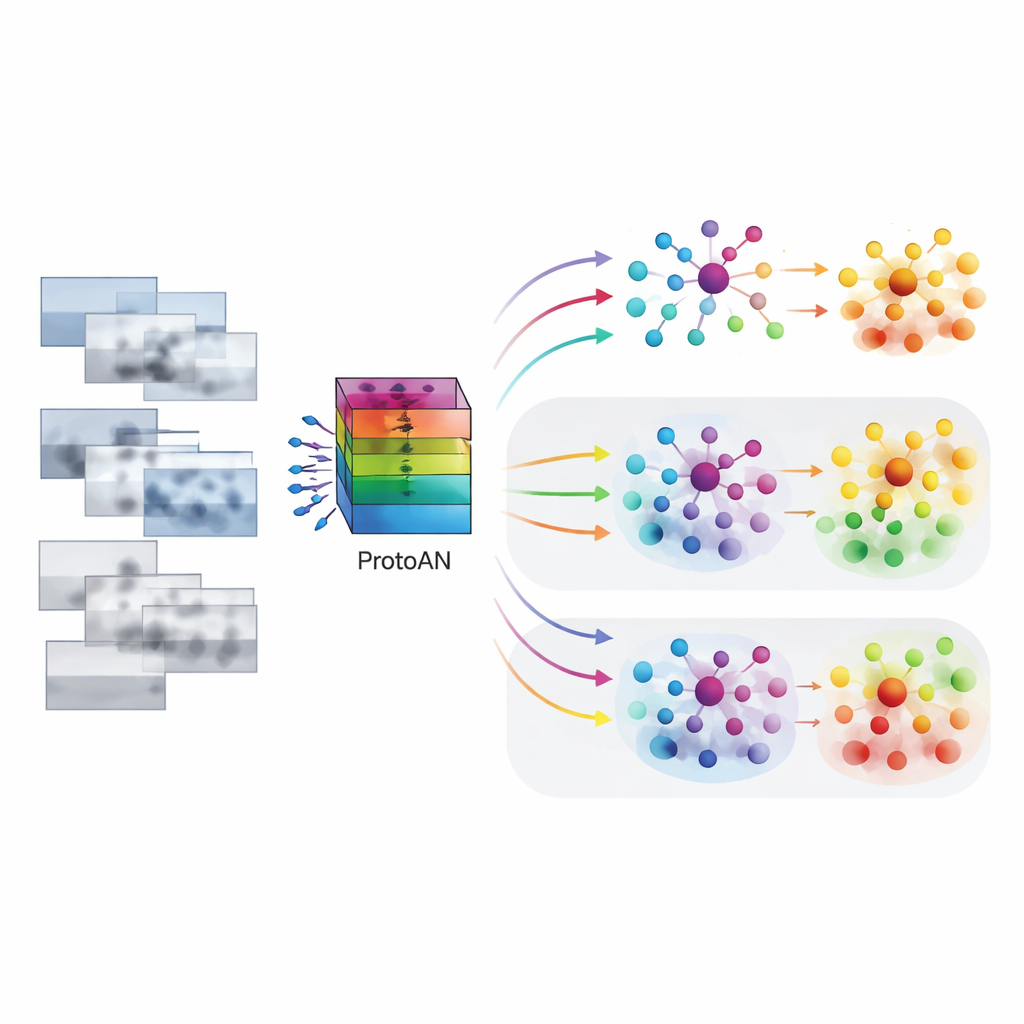
Önerilen PoCoMT çerçevesinin çekirdeği, Prototip Hizalama Ağı yani ProtoAN’dır. Her nesneyi her diğer nesneyle karşılaştırmak yerine, ProtoAN her kategori için küçük bir temsil noktası seti—prototipler—öğrenir; örneğin araba veya yaya gibi. Görüntü bölgelerinden çıkarılan özellikler, aynı kategorinin farklı etki alanlarındaki örneklerinin paylaşılan prototipleri etrafında toplandığı ve farklı kategorilerin birbirinden uzaklaştığı özel bir uzaya eşlenir. Bir kontrastif kayıp, bu kümeleşmeyi hem tek bir etki alanı içinde hem de kaynak ve hedef etki alanları arasında teşvik eder. Kritik olarak, bu mekanizma arka planı bile kendi kategorisi olarak ele alır; bu da sistemi gerçek nesneleri karmaşadan ayırmada yardımcı olur.
Etiketlenmemiş Veriden Daha İyi Yararlanma
PoCoMT, öğretmenin sahte‑etiketlerini iki şekilde iyileştirir. İlk olarak, bir “bilgi maksimizasyonu” hedefi, hedef görüntülerdeki tahminleri hem her nesne için emin hem de kategoriler arasında çeşitli olmaya zorlar; böylece her şeyi aynı sınıf olarak etiketleme gibi basit bir davranışın önüne geçer. İkinci olarak, ProtoAN sahte‑etiketleri hammadde tahminlerine güvenmek yerine özellikleri prototiplerle karşılaştırarak rafine eder. Bir bölgenin tahmin edilen sınıfı en yakın prototiple uyuşmuyorsa, etiket ayarlanabilir. Bu, sistemi gürültüye karşı daha toleranslı kılar: yazarlar eğitim sırasında bilerek birçok sahte‑etiketi bozsa bile, PoCoMT rekabetçi yöntemlere kıyasla daha kademeli bir bozulma gösterdi.
Zorlu Gerçek Dünya Sahnesi İçin Daha Güçlü Algılayıcılar
Açık‑tan‑sisli sokaklar, sentetik‑ten‑gerçeğe trafik, gündüz‑ten‑alaca karanlığa sürüş ve gerçekçi‑ten‑sanatsal görüntüler dahil geniş bir ölçüt takımı üzerinde test edilen PoCoMT, genellikle tespit doğruluğunda birkaç yüzdelik puan farkla mevcut gözetimsiz etki alanı uyarlama tekniklerini sürekli olarak geride bıraktı. Bazı durumlarda, etiketli hedef veriler üzerinde doğrudan eğitilmiş modelleri bile geride bıraktı; bunun nedeni, etiketli kaynak görüntüleri ve bol miktarda etiketlenmemiş hedef görüntüyü birlikte kullanabilme yeteneğiydi. Uzman olmayanlar için mesaj açıktır: bir nesne algılayıcının her kategori için kendi iç “işaret noktalarını” düzenlemesine izin vererek ve öğretmen ile öğrencinin bilgi alışverişini dikkatle yönlendirerek, bu yaklaşım eğitim verilerinden farklı görünen dünyalarda yapay görme sistemlerini daha dayanıklı kılar.
Atıf: Cao, Q., Tao, J., Dan, Y. et al. Prototype-oriented contrastive mean-teacher for unsupervised domain adaptive object detection. Sci Rep 16, 10869 (2026). https://doi.org/10.1038/s41598-026-44991-7
Anahtar kelimeler: gözetimsiz etki alanı uyarlaması, nesne algılama, öz‑eğitim, kontrastif öğrenme, prototip öğrenme