Clear Sky Science · ja
教師あり平均化とプロトタイプに基づくコントラスト学習による教師なしドメイン適応型物体検出のプロトタイプ志向手法
未知の環境で物体を見つけることをコンピュータに教える
最新のAIシステムは、写真の中の車や人、道路標識を驚くべき精度で検出できますが、風景が変わると途端に苦戦します。晴れた街路で訓練された検出器は、霧の中や夜間、あるいはスタイライズされたアート作品では誤動作しがちです。本論文は、こうしたシステム内部の「教師」を新たに“教える”手法を提案し、人手による新たなバウンディングボックスの注釈を必要とせずに新しい条件へ適応できるようにします。
なぜ物体検出器は環境変化で弱くなるのか
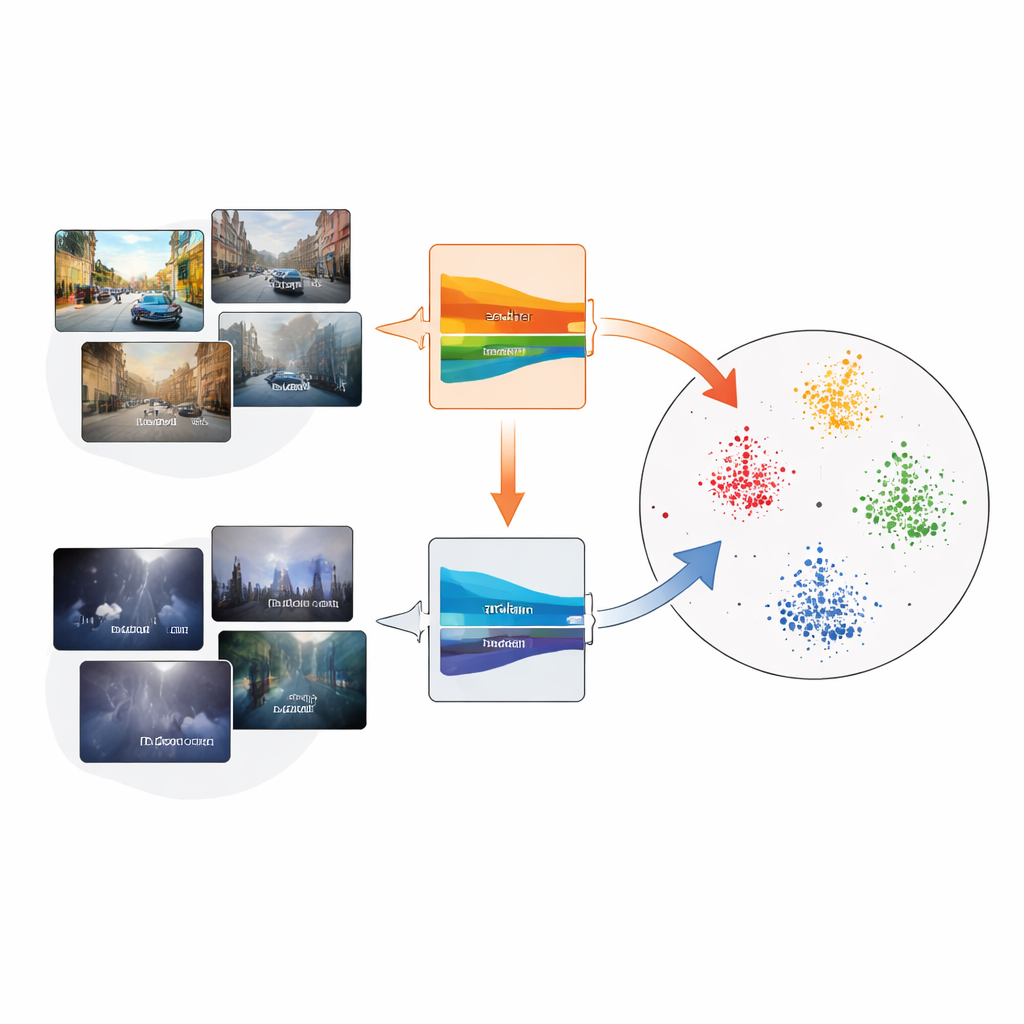
物体検出は、すべての車やバス、自転車に細かくボックスが付けられた大量のラベル付き画像に依存しています。しかし実世界のカメラ映像は訓練時の条件と一致することは稀です。天候や照明、カメラの種類が変わると物体の見え方がシフトし、これをドメインシフトと呼びます。こうした変化が起こると、晴天の昼間の交通風景で訓練された検出器は、霧の高速道路や夜間走行で大きく誤検出することがあります。新しい条件ごとに新たにラベルを集めるのは高コストなので、研究者たちは新ドメインのラベルなしデータだけで検出器を適応させる手法を模索しています。
内蔵の案内役を持つ自己学習システム
広く使われている戦略の一つは、モデル自身に学ばせる自己学習です。「教師」ネットワークは「生徒」ネットワークの滑らか化(スムージング)版として構築され、ラベルのないターゲット画像に対してボックスを予測します。これらの予測(疑似ラベル)を用いて生徒を訓練し、生徒が改善するにつれて教師は生徒の重みの移動平均で更新されます。しかし、初期の疑似ラベルが誤っていると(例えば濃霧で物体を見落とすなど)、誤りが蓄積しやすくなります。著者らは、平均化された教師(mean‑teacher)設定、コントラスト学習(関連する特徴を引き寄せ、異なるものを離す)、および各カテゴリを要約するコンパクトな「プロトタイプ」という三つの考えを組み合わせることで、この自己学習を安定化できることを示します。
特徴空間のランドマークとしてのプロトタイプ
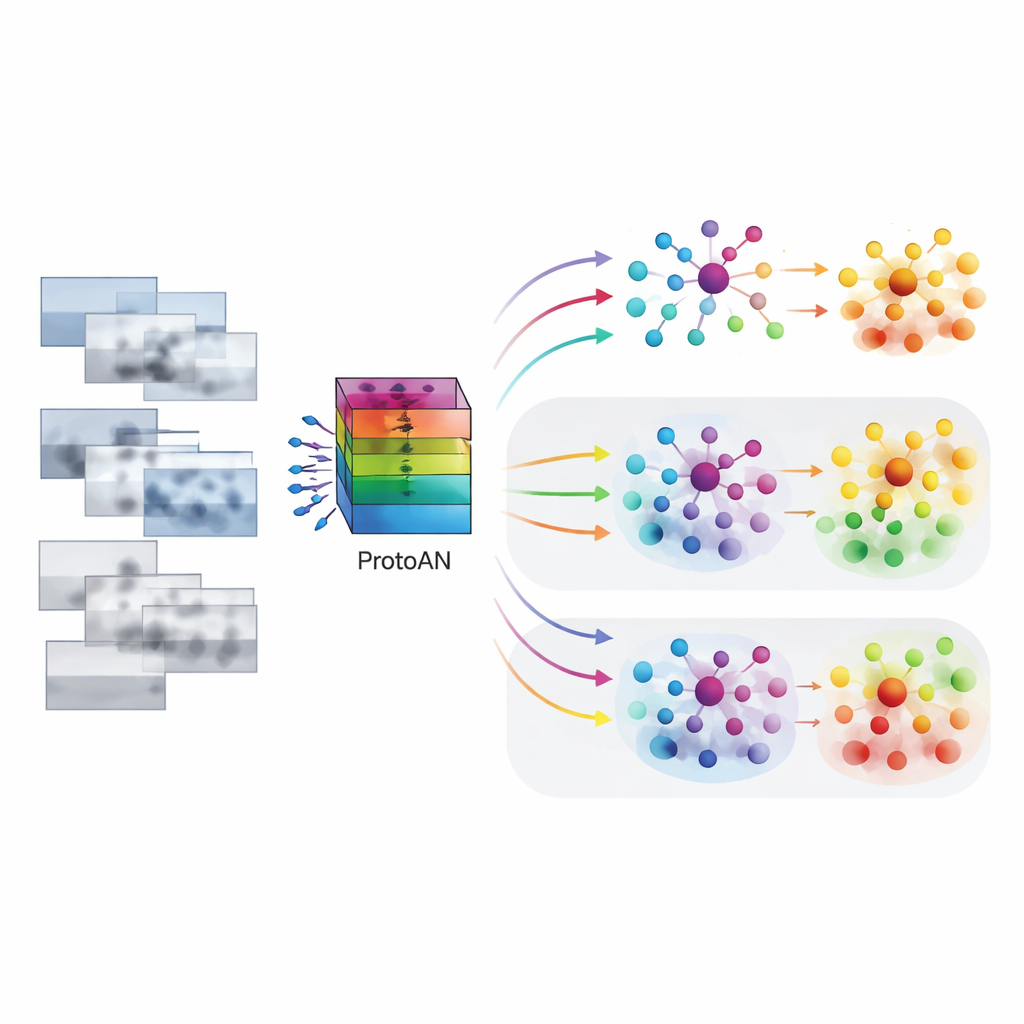
提案手法PoCoMTの中核は、プロトタイプ整合ネットワーク(Prototype Alignment Network, ProtoAN)です。すべての物体を互いに比較する代わりに、ProtoANは車や歩行者といった各カテゴリについて代表点(プロトタイプ)の小さな集合を学習します。画像領域から抽出された特徴は、同一カテゴリの例が異なるドメイン間でも共通のプロトタイプの周りに集まり、異なるカテゴリは互いに離れるような特殊な空間に写像されます。コントラスト損失はこのクラスタリングを促進し、単一ドメイン内だけでなくソースとターゲットの両ドメイン間でも作用します。重要なのは、この仕組みが背景も独立のカテゴリとして扱うため、物体と雑多な背景とを区別するのに役立つ点です。
ラベルなしデータのより良い活用
PoCoMTは教師の疑似ラベルを二つの方法で改善します。第一に「情報最大化」の目的が、ターゲット画像上の予測を各物体については確信度高く、カテゴリ全体では多様となるよう促し、すべてを同じクラスにしてしまうような自明な振る舞いを避けます。第二に、ProtoANは生の予測を盲信するのではなく、特徴とプロトタイプとの比較に基づいて疑似ラベルを洗練します。ある領域の予測クラスが最も近いプロトタイプと一致しない場合、そのラベルを修正できます。これによりシステムはノイズに対してより寛容になります:著者らが訓練中に多数の疑似ラベルを意図的に汚染した場合でも、PoCoMTは競合手法より徐々に性能が低下するにとどまりました。
過酷な実世界シーンでより強力な検出器を
晴天→霧、合成→実世界の交通、昼→薄暮、現実的→芸術的表現といった幅広いベンチマークで試したところ、PoCoMTは既存の教師なしドメイン適応技術を一貫して上回り、検出精度で数ポイントの改善を示すことが多くありました。場合によっては、ラベル付きのターゲットデータで直接訓練したモデルよりも優れた結果を出すことさえあり、これはラベル付きソース画像と豊富なラベルなしターゲット画像の両方を活用する能力によるものです。専門外の読者に向けた要点は明快です:検出器に各カテゴリの内部的な“ランドマーク”を自己組織化させ、教師と生徒が情報をやり取りする方法を注意深く導くことで、訓練データと実際の世界の見た目が異なる場合でもAI視覚システムの堅牢性を高められる、ということです。
引用: Cao, Q., Tao, J., Dan, Y. et al. Prototype-oriented contrastive mean-teacher for unsupervised domain adaptive object detection. Sci Rep 16, 10869 (2026). https://doi.org/10.1038/s41598-026-44991-7
キーワード: 教師なしドメイン適応, 物体検出, 自己学習, コントラスト学習, プロトタイプ学習