Clear Sky Science · es
Contraste prototípico orientado a prototipos con maestro medio para la adaptación de dominio no supervisada en detección de objetos
Enseñar a los ordenadores a reconocer objetos en nuevos entornos
Los sistemas de IA modernos pueden detectar coches, personas y señales en fotos con una precisión impresionante, hasta que cambia el escenario. Un detector entrenado en calles soleadas puede fallar en niebla, de noche o en obras de arte estilizadas. Este artículo presenta una nueva forma de “enseñar al maestro” dentro de estos sistemas para que puedan adaptarse a nuevas condiciones sin necesitar nuevas cajas dibujadas a mano por humanos.
Por qué los detectores de objetos tienen dificultades cuando cambia el mundo
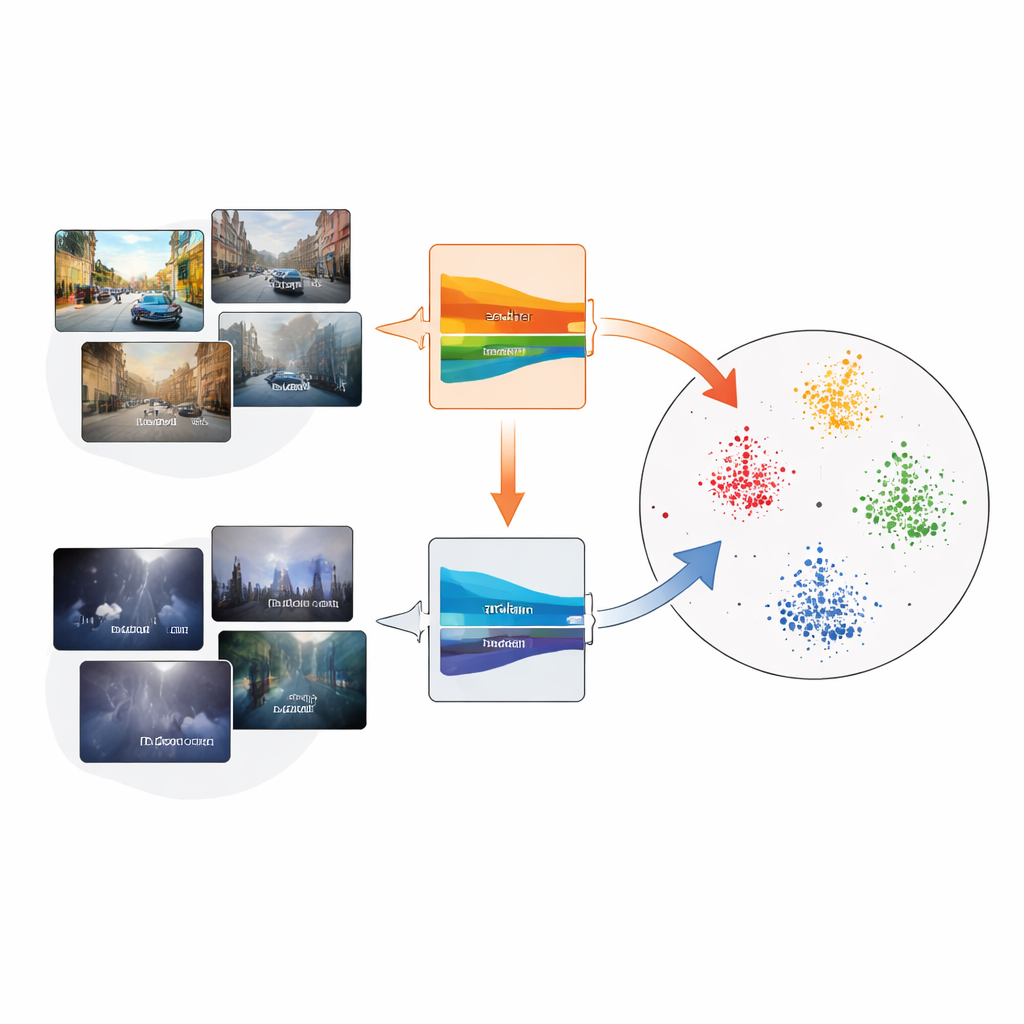
La detección de objetos se basa en grandes colecciones de imágenes etiquetadas donde cada coche, autobús o bicicleta está cuidadosamente enmarcado. Pero las cámaras del mundo real rara vez coinciden con esas condiciones de entrenamiento. Diferentes climas, iluminación o tipos de cámara cambian la apariencia de los objetos —un fenómeno conocido como cambio de dominio. Cuando eso ocurre, los detectores entrenados en un dominio, como escenas de tráfico diurnas y despejadas, pueden fallar estrepitosamente en otro, como autopistas con niebla o recorridos nocturnos. Reunir nuevas etiquetas para cada condición es costoso, por lo que los investigadores buscan métodos que adapten los detectores usando solo datos no etiquetados del nuevo dominio.
Un sistema de autoaprendizaje con una guía incorporada
Una estrategia popular permite que el modelo se enseñe a sí mismo. Una red “maestra”, construida como una versión suavizada de una red “estudiante”, predice cajas en imágenes objetivo no etiquetadas; esas predicciones, llamadas seudoetiquetas, sirven para entrenar al estudiante. Con el tiempo, el estudiante mejora y la maestra se actualiza como un promedio móvil de los pesos del estudiante. Sin embargo, si las primeras seudoetiquetas son erróneas —por ejemplo, al omitir objetos en niebla espesa— los errores pueden acumularse. Los autores muestran que tres ideas se pueden combinar para estabilizar este autoentrenamiento: una configuración de maestro medio, aprendizaje contrastivo (que acerca características relacionadas y separa las demás) y prototipos compactos que resumen cada categoría de objeto.
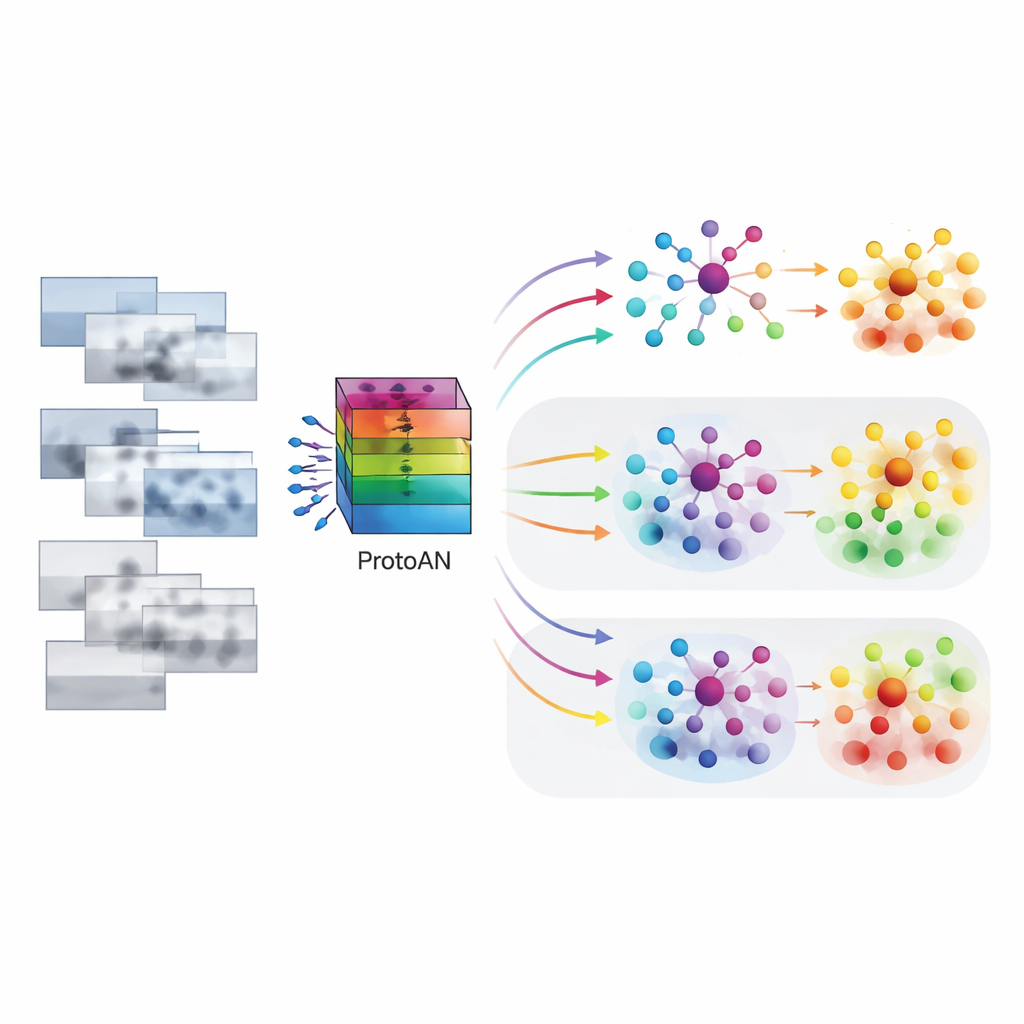
Prototipos como hitos en el espacio de características
El núcleo del marco PoCoMT propuesto es la Red de Alineación de Prototipos, o ProtoAN. En lugar de comparar cada objeto con todos los demás, ProtoAN aprende un pequeño conjunto de puntos representativos —prototipos— para cada categoría, como coche o peatón. Las características extraídas de regiones de imagen se mapean a un espacio especial donde los ejemplos de la misma categoría procedentes de distintos dominios se agrupan alrededor de su prototipo compartido, mientras que las distintas categorías se separan. Una pérdida contrastiva fomenta este agrupamiento, tanto dentro de un mismo dominio como entre dominios fuente y objetivo. De forma crucial, este mecanismo trata incluso el fondo como una categoría propia, ayudando al sistema a distinguir objetos reales del ruido.
Hacer mejor uso de los datos no etiquetados
PoCoMT mejora las seudoetiquetas de la maestra de dos maneras. Primero, un objetivo de “maximización de la información” empuja a que las predicciones en las imágenes objetivo sean a la vez confiadas para cada objeto y diversas entre categorías, evitando el comportamiento trivial de etiquetar todo como la misma clase. Segundo, ProtoAN refina las seudoetiquetas comparando las características con los prototipos en lugar de confiar en las predicciones en bruto. Si la clase predicha de una región no coincide con el prototipo más cercano, la etiqueta puede ajustarse. Esto hace al sistema más tolerante al ruido: incluso cuando los autores corrompieron deliberadamente muchas seudoetiquetas durante el entrenamiento, PoCoMT degradó su rendimiento de forma más suave que métodos competidores.
Detectores más robustos para escenas reales difíciles
Evaluado en una amplia batería de benchmarks —incluyendo calles de despejado a con niebla, tráfico sintético a real, conducción de día a crepúsculo e imágenes realistas a artísticas— PoCoMT superó de forma consistente las técnicas existentes de adaptación de dominio no supervisada, a menudo por varios puntos porcentuales en precisión de detección. En algunos casos incluso superó a modelos entrenados directamente con datos etiquetados del dominio objetivo, gracias a su capacidad para aprovechar tanto imágenes fuente etiquetadas como abundantes imágenes objetivo no etiquetadas. Para quien no sea especialista, el mensaje es claro: al permitir que un detector de objetos organice sus propios “hitos” internos para cada categoría y al guiar cuidadosamente cómo la maestra y el estudiante intercambian información, este enfoque hace que los sistemas de visión por IA sean más robustos cuando el mundo se ve diferente de sus datos de entrenamiento.
Cita: Cao, Q., Tao, J., Dan, Y. et al. Prototype-oriented contrastive mean-teacher for unsupervised domain adaptive object detection. Sci Rep 16, 10869 (2026). https://doi.org/10.1038/s41598-026-44991-7
Palabras clave: adaptación de dominio no supervisada, detección de objetos, autoentrenamiento, aprendizaje contrastivo, aprendizaje de prototipos