Clear Sky Science · sv
Adversariell ruttplanering för optimal CCTV‑övervakning: en fallstudie i optimering av säkerheten vid kärntekniska anläggningar
Varför smartare kameror betyder mer för allmän säkerhet
Från flygplatser till stadsgator är trygghetskameror avsedda att upptäcka problem innan de når människor eller kritisk utrustning. Ändå kan även täta kameranät lämna blinda fläckar som en beslutsam intrångsman kan utnyttja. Den här studien undersöker en av de mest höginsatsmiljöerna man kan föreställa sig — ett kärnkraftverk — och visar hur man kraftigt kan förbättra kamerauppställningarna genom att behandla potentiella inkräktare som strategiska planerare snarare än slumpmässiga överträdare.
Att ompröva hur vi placerar säkerhetskameror
Traditionella kamerauppställningar utformas ofta av experter med erfarenhet, enkel geometri eller generella optimeringsverktyg. Dessa metoder fokuserar främst på att täcka så mycket golvyta som möjligt med ett begränsat antal kameror. De frågar sällan: ”Om jag var en inkräktare, vilken rutt skulle jag välja för att undvika att bli sedd?” Författarna menar att denna lucka är kritisk i högriskmiljöer som kärnanläggningar, där ett enda lyckat intrång kan få allvarliga konsekvenser. De föreslår en metod kallad Adversarial Path Planning (APP), som explicit modellerar hur en försiktig, riskundvikande inkräktare kan röra sig genom en anläggning och sedan placerar kameror för att göra dessa rutter så synliga som möjligt.
Hur den nya planeringsmetoden tänker som en inkräktare
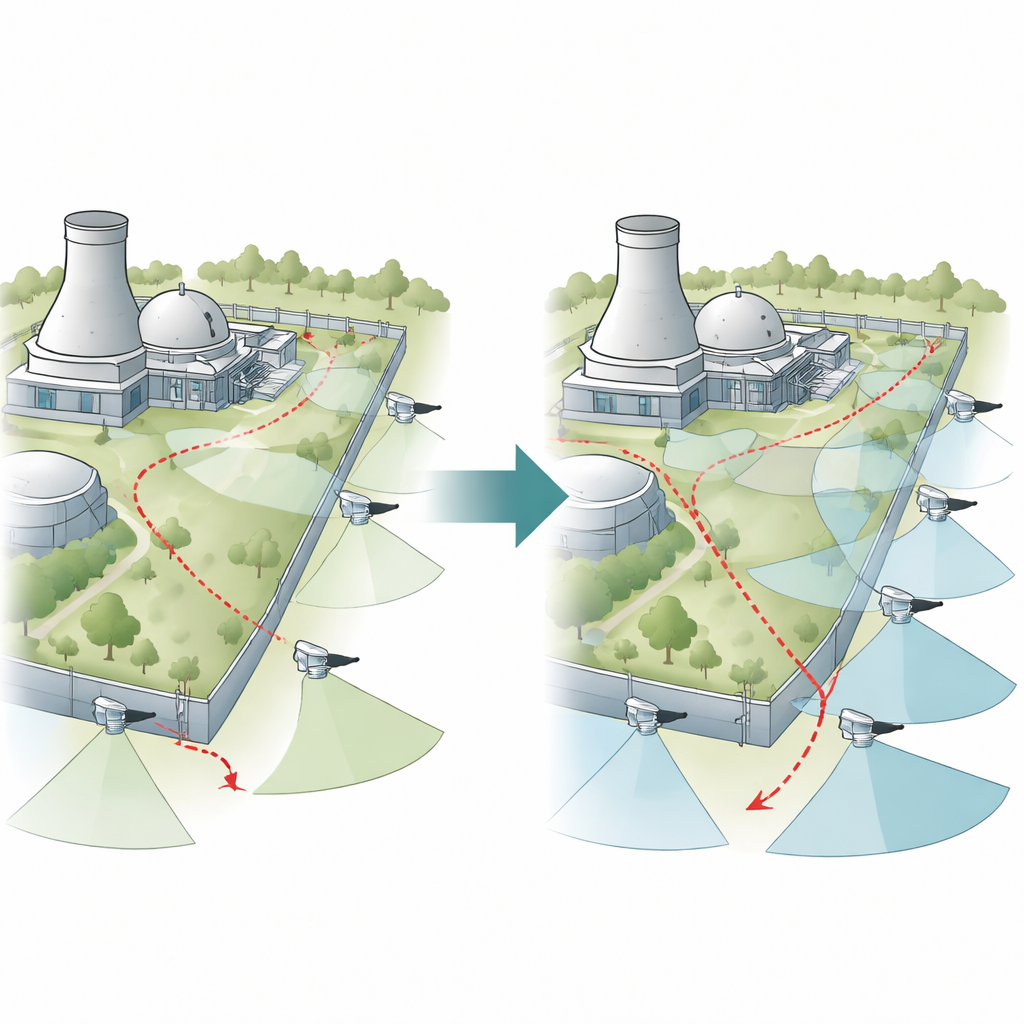
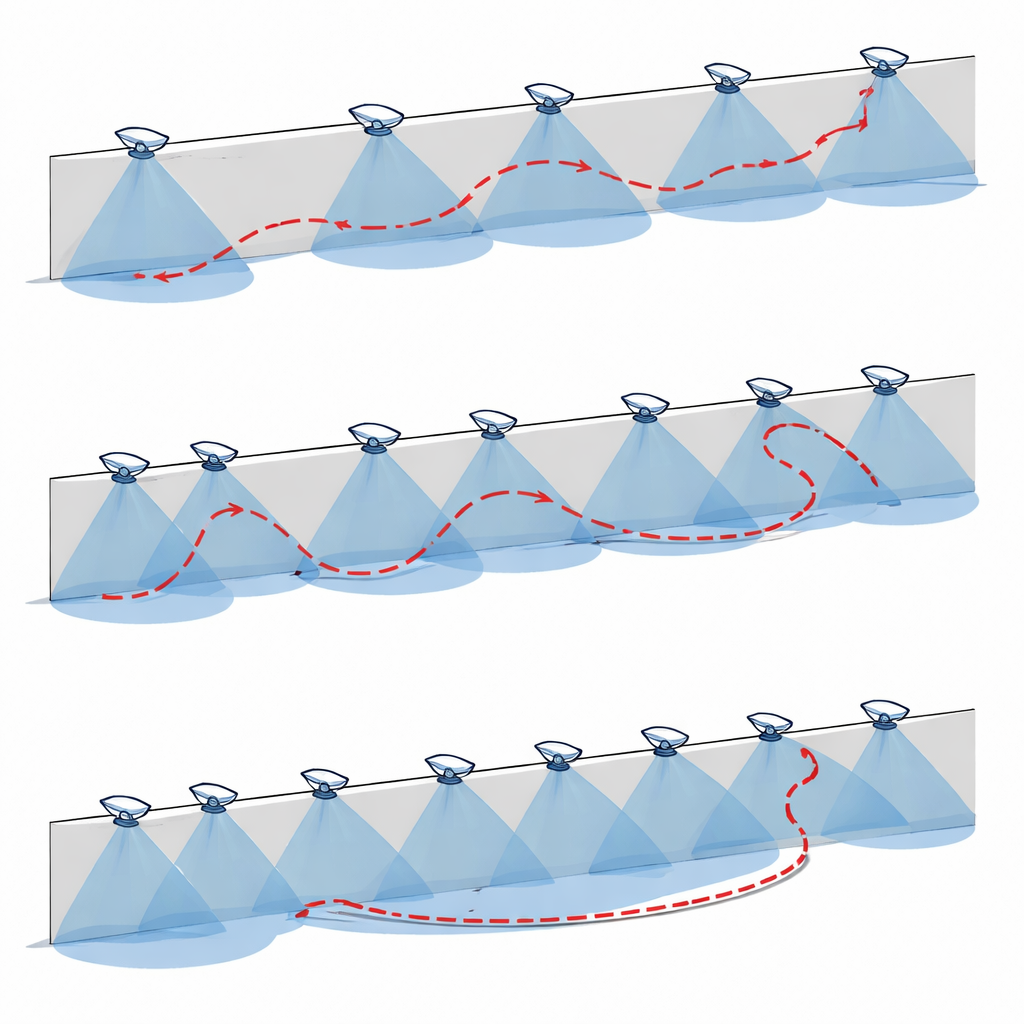
I APP‑ramverket omvandlas anläggningen till en digital karta bestående av många små celler, förbundna av möjliga rörelsevägar. Kameror modelleras realistiskt: var och en har en viss höjd, synfält, maximal räckvidd och en oundviklig dödzon nära stolpen. Algoritmen uppskattar först vilka vägar en inkräktare skulle föredra, under antagandet att denne vill minimera risken att bli upptäckt och känner till det aktuella kameralayoutet. Därefter söker den efter kameraplaceringar som ökar upptäcktschansen längs dessa prioriterade rutter samtidigt som det totala antalet kameror hålls inom budget. Efter varje omgång av placeringar beräknas inkräktarens rutter om, nu som reaktion på det nya övervakningsmönstret. Detta fram‑och‑tillbaka fortsätter tills båda sidor ”stabiliseras”, vilket ger en layout som är robust mot ett adaptivt, intelligent hot.
Test av idén på en modell av ett kärnkraftverk
För att se hur väl detta fungerar i praktiken tillämpade forskarna APP på en ofta använd hypotetisk layout för ett kärnkraftverk, känd som Lone Pine Nuclear Power Plant, utvecklad av Internationella atomenergiorganet som en säkerhetsreferens. Anläggningen är uppdelad i zoner med olika viktighetsnivåer, omgiven av stängsel och vakttorn. För varje del av perimetern utvärderade teamet många möjliga kameratyper och -positioner och poängsatte dem utifrån hur långt de kunde se, hur mycket detalj de gav och hur stor dödzon de skapade nära stolpen. APP valde sedan kamerakombinationer som tillsammans bevakade de farligaste vägarna in till viktiga byggnader som kontrollrummet och reaktorstödytorna.
Hur mycket säkrare och billigare kan övervakning bli?
Resultaten visar att ett adversariellt tänkesätt lönar sig. Jämfört med en baslinjeuppställning och flera populära optimeringstekniker inspirerade av naturen — såsom genetiska algoritmer, partikelsvärmar och myrkolonier — uppnådde APP‑metoden omkring 95 % täckning av kritiska områden och en 98 % sannolikhet att fånga en inkräktare längs de mest oroande rutterna. Samtidigt minskade den dödzonerna nära kamerorna med 85 % och reducerade antalet kameror från 50 till 30. Eftersom varje kamera medför installations-, ström‑ och underhållskostnader motsvarade detta en kostnadseffektivitet som ökade med cirka 27 %. En djupare jämförelse och statistisk testning visade att dessa förbättringar inte var slumpartade utan konsekventa fördelar jämfört med konkurrerande metoder.
Begränsningar, framtida steg och varför det spelar roll bortom kärnkraftverk
Liksom alla simuleringsstudier antar detta arbete idealförhållanden: klart väder, felfritt fungerande utrustning och en enda inkräktare som beter sig rationellt och riskundvikande. Verkliga anläggningar möter dimma, bländning, hårdvarufel och möjligen koordinerade grupper. Ändå erbjuder ramverket ett kraftfullt planeringsverktyg för designfasen, innan betong hälls och stolpar reses. Samma strategi kan hjälpa till att säkra gränser, flygplatser, industrianläggningar eller stora offentliga platser genom att skifta frågan från ”Hur många kameror har vi råd med?” till ”Hur kan vi göra en inkräktarens säkraste väg så synlig som möjligt?” Författarna föreslår att framtida arbete kan koppla denna planeringsmotor till artificiell intelligens som analyserar livevideo, eller till mobila sensorer som drönare, och därigenom skapa övervakningssystem som inte bara är väl utformade på papper utan också kan anpassa sig i realtid i takt med att hoten utvecklas.
Vad detta betyder för vardaglig säkerhet
För icke‑specialister är huvudbudskapet att fler kameror inte automatiskt innebär bättre säkerhet. Det som spelar roll är hur väl ett kameranät förutser mänskligt beteende. Genom att explicit modellera hur inkräktare tänker och rör sig visar Adversarial Path Planning‑metoden att det är möjligt att bevaka kritiska platser mer noggrant, med färre enheter och lägre kostnader. Om metoder som denna antas i större skala kan både hög‑risk industriella platser och vardagliga offentliga miljöer bli säkrare, smartare och mer motståndskraftiga utan att enbart överskölja miljön med hårdvara.
Citering: Salman, A.E., Shaaban, N., Zidan, W.I. et al. Adversarial path planning for optimal CCTV surveillance: a case study on nuclear facility security optimization. Sci Rep 16, 12697 (2026). https://doi.org/10.1038/s41598-026-47647-8
Nyckelord: kärnsäkerhet, CCTV‑övervakning, adversariell ruttplanering, kritisk infrastruktur, optimering av kameraplacering