Clear Sky Science · nl
Antagonistische routeplanning voor optimale CCTV‑bewaking: een casestudy over beveiligingsoptimalisatie van nucleaire installaties
Waarom slimmer geplaatste camera’s belangrijk zijn voor de openbare veiligheid
Van luchthavens tot stadsstraten: beveiligingscamera’s moeten problemen signaleren voordat ze mensen of kritische apparatuur kunnen bereiken. Toch kunnen zelfs dichte cameranetwerken blinde vlekken laten die een vastberaden indringer kan uitbuiten. Deze studie onderzoekt een van de meest risicovolle omgevingen die men zich kan voorstellen — een kerncentrale — en toont aan hoe het behandelen van potentiële indringers als strategische planners, in plaats van als willekeurige overtreders, de manier en plaatsing van camera’s sterk kan verbeteren.
Een hernieuwde kijk op het plaatsen van beveiligingscamera’s
Traditionele cameraconfiguraties worden doorgaans door experts ontworpen op basis van ervaring, eenvoudige geometrie of algemene optimalisatietools. Deze methoden richten zich vooral op het bedekken van zoveel mogelijk vloeroppervlak met een vast aantal camera’s. Ze stellen zelden de vraag: “Als ik een indringer was, welke route zou ik kiezen om niet gezien te worden?” De auteurs stellen dat deze lacune cruciaal is op risicovolle locaties zoals nucleaire installaties, waar één succesvolle inbraak ernstige gevolgen kan hebben. Ze stellen een aanpak voor die Adversarial Path Planning (APP) heet, die expliciet modelleert hoe een voorzichtige, risico‑vermijdende indringer door een faciliteit zou bewegen en vervolgens camera’s zo plaatst dat die routes zo goed mogelijk zichtbaar worden.
Hoe de nieuwe planningsmethode denkt als een indringer
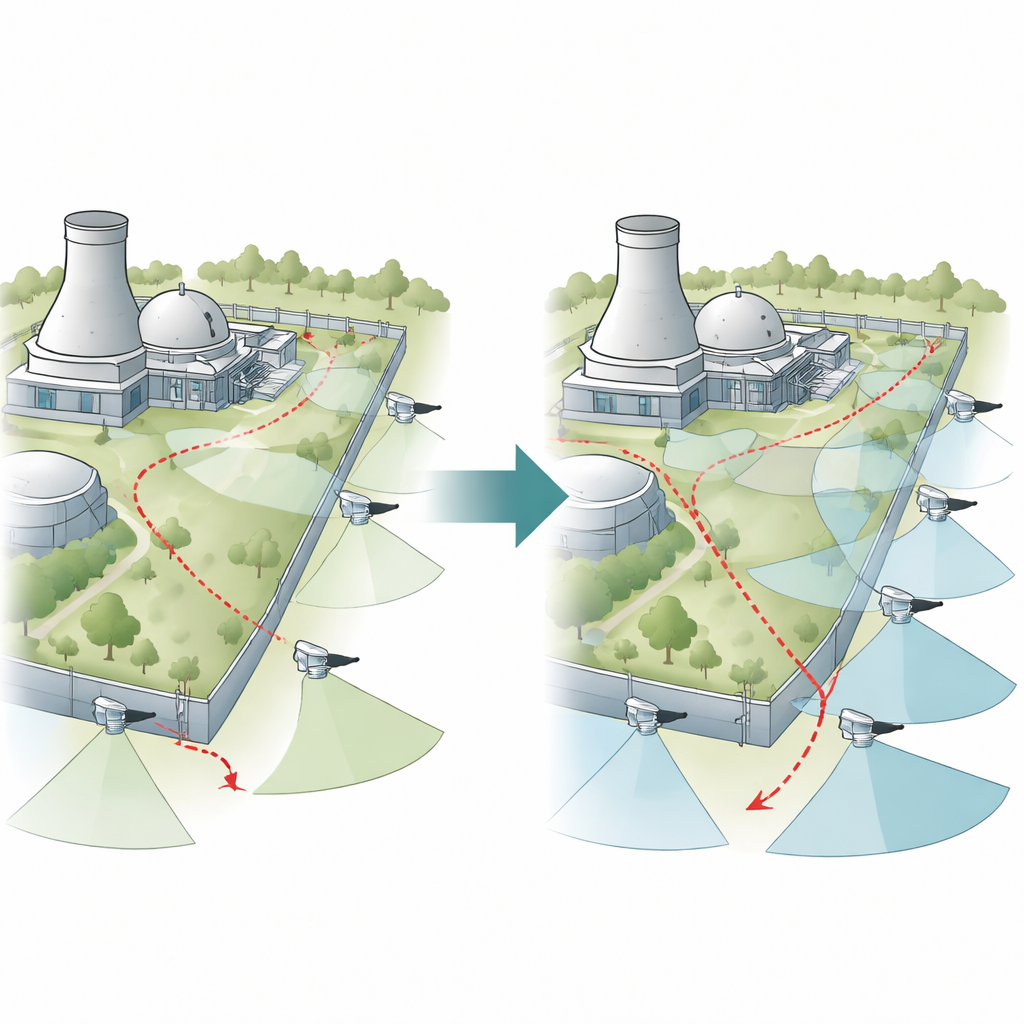
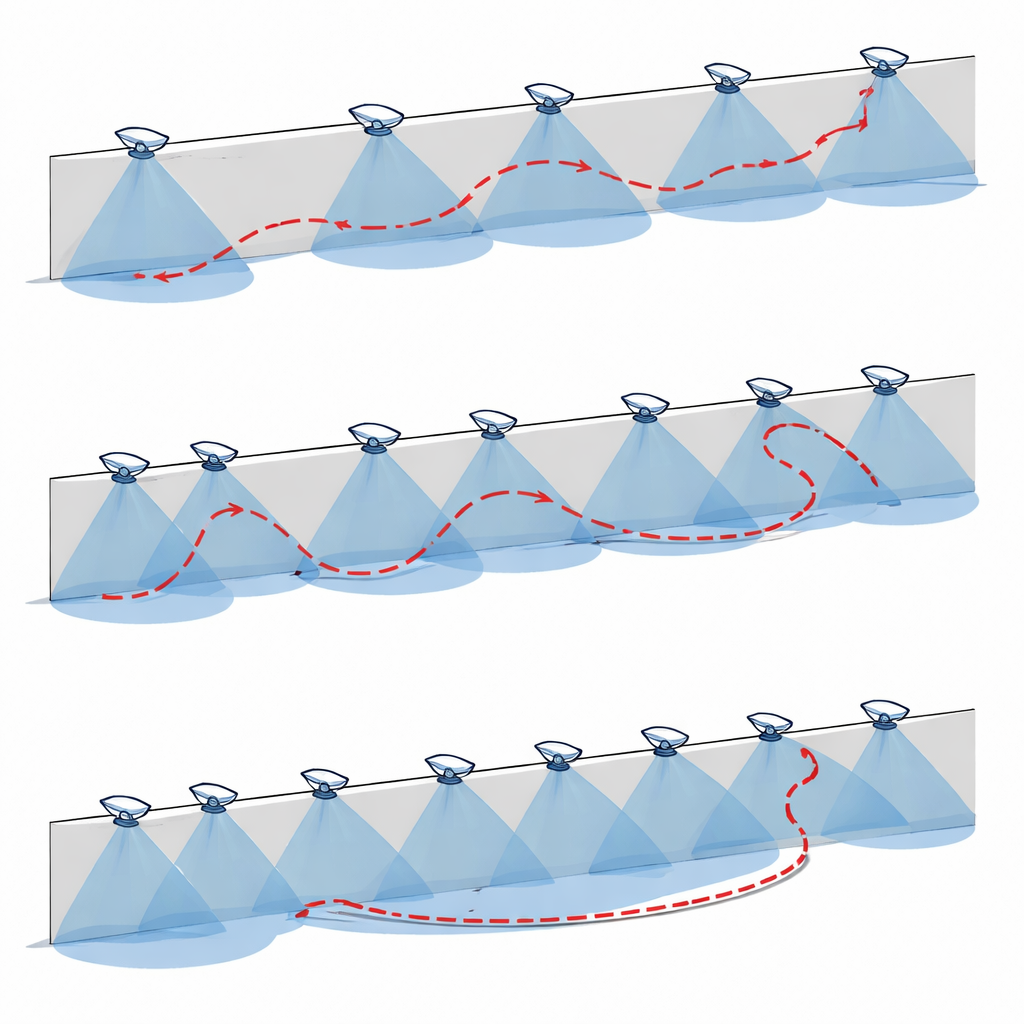
In het APP‑kader wordt de faciliteit omgezet in een digitale kaart die uit veel kleine cellen bestaat, verbonden door mogelijke bewegingspaden. Camera’s worden realistisch gemodelleerd: elk heeft een specifieke hoogte, gezichtsveld, maximaal bereik en een onvermijdelijke blinde zone dicht bij de paal. Het algoritme schat eerst in welke paden een indringer zou verkiezen, uitgaande van de wens om de kans op detectie te minimaliseren en met kennis van de huidige cameralay‑out. Daarna zoekt het naar cameraplaceringen die de detectiekans langs deze voorkeursroutes verhogen, terwijl het totale aantal camera’s binnen het budget blijft. Na elke plaatsingsronde worden de indringerpaden opnieuw berekend, nu reagerend op het nieuwe bewakingspatroon. Dit heen‑en‑weer zet door totdat beide partijen "tot rust komen", wat resulteert in een lay‑out die robuust is tegen een adaptieve, intelligente dreiging.
Het idee testen op een modelkerncentrale
Om te beoordelen hoe dit in de praktijk werkt, pasten de onderzoekers APP toe op een veelgebruikte hypothetische kerncentrale‑indeling die bekendstaat als de Lone Pine Nuclear Power Plant, ontwikkeld door het Internationaal Atoomenergieagentschap als een beveiligingsbenchmark. De centrale is verdeeld in zones met verschillende belangniveaus, omringd door hekken en wachttorens. Voor elk deel van het omheiningperimeter evalueerde het team vele mogelijke cameratypen en -posities, waarbij ze scoorden op hoe ver ze konden zien, hoeveel detail ze leverden en hoe groot de dode zone nabij de paal was. APP selecteerde vervolgens cameracombinaties die gezamenlijk de gevaarlijkste paden naar vitale gebouwen zoals de controlekamer en reactorondersteuningsruimtes bewaakten.
Hoeveel veiliger en goedkoper kan bewaking worden?
De resultaten laten zien dat het loont om vanuit een antagonistisch perspectief te denken. Vergeleken met een basislay‑out en met verschillende populaire optimalisatietechnieken geïnspireerd door de natuur — zoals genetische algoritmen, deeltjeszwermen en mierenkolonies — bereikte de APP‑aanpak ongeveer 95% dekking van kritieke gebieden en een 98% kans om een indringer te betrappen langs de meest zorgwekkende routes. Tegelijkertijd verminderde het de blinde zones dicht bij camera’s met 85% en sneed het aantal camera’s terug van 50 naar 30. Omdat elke camera installatie‑, stroom‑ en onderhoudskosten met zich meebrengt, vertaalde dit zich in ongeveer 27% winst in kostenefficiëntie. Een diepgaande vergelijking en statistische tests toonden aan dat deze verbeteringen geen toevallige uitkomsten waren, maar consistente voordelen ten opzichte van concurrerende methoden.
Beperkingen, volgende stappen en waarom het verder reikt dan kerncentrales
Zoals bij elke simulatiestudie gaat dit werk uit van ideale omstandigheden: helder weer, perfect werkende apparatuur en een enkele indringer die rationeel en risico‑vermijdend handelt. Reële locaties hebben te maken met mist, schittering, hardwarestoringen en mogelijk gecoördineerde groepen. Desondanks biedt het kader een krachtig planningsinstrument voor de ontwerpfase, voordat beton gestort en palen geplaatst worden. Dezelfde strategie kan helpen bij het beveiligen van grenzen, luchthavens, industriële installaties of grote publieke locaties door de vraag te veranderen van “Hoeveel camera’s kunnen we ons veroorloven?” naar “Hoe kunnen we het veiligste pad voor een indringer zo zichtbaar mogelijk maken?” De auteurs suggereren dat toekomstig werk deze planningsmotor kan koppelen aan kunstmatige intelligentie die live‑video analyseert, of aan mobiele sensoren zoals drones, zodat bewakingssysteem niet alleen op papier goed zijn ontworpen maar ook in realtime kunnen aanpassen naarmate dreigingen zich ontwikkelen.
Wat dit betekent voor alledaagse veiligheid
Voor niet‑specialisten is de belangrijkste boodschap dat meer camera’s niet automatisch betere beveiliging betekenen. Wat telt is hoe goed een cameranetwerk menselijk gedrag anticipeert. Door expliciet te modelleren hoe indringers denken en bewegen, laat de Adversarial Path Planning‑methode zien dat het mogelijk is kritieke plekken grondiger te bewaken met minder apparaten en lagere kosten. Als deze benaderingen breed worden toegepast, zouden zowel hoogrisico‑industriële locaties als alledaagse openbare ruimten veiliger, slimmer en veerkrachtiger kunnen worden zonder alles simpelweg vol te hangen met hardware.
Bronvermelding: Salman, A.E., Shaaban, N., Zidan, W.I. et al. Adversarial path planning for optimal CCTV surveillance: a case study on nuclear facility security optimization. Sci Rep 16, 12697 (2026). https://doi.org/10.1038/s41598-026-47647-8
Trefwoorden: nucleaire beveiliging, CCTV‑bewaking, antagonistische routeplanning, kritieke infrastructuur, optimalisatie van cameraplaatsing