Clear Sky Science · ru
Противодействующее планирование маршрутов для оптимальной системы видеонаблюдения: кейс оптимизации безопасности на атомных объектах
Почему умные камеры важны для общественной безопасности
От аэропортов до городских улиц камеры безопасности должны выявлять угрозу до того, как она достигнет людей или критического оборудования. Тем не менее даже плотная сеть камер может оставлять «слепые» зоны, которые решительный нарушитель может использовать. В этом исследовании рассматривается один из наивысших по ставкам сценариев — атомная электростанция — и показано, что если рассматривать потенциальных злоумышленников как стратегических планировщиков, а не как случайных нарушителей, это может существенно улучшить расположение камер.
Переосмысление размещения камер безопасности
Традиционные схемы размещения камер обычно разрабатывают эксперты, опираясь на опыт, простую геометрию или общие инструменты оптимизации. Эти методы в основном ориентированы на покрытие как можно большей площади при фиксированном числе камер. Они редко задают вопрос: «Если бы я был нарушителем, какой путь я бы выбрал, чтобы остаться незаметным?» Авторы утверждают, что этот пробел критичен для объектов с высоким риском, таких как ядерные установки, где одно успешное проникновение может иметь серьёзные последствия. Они предлагают подход, называемый Противодействующим Планированием Маршрутов (Adversarial Path Planning, APP), который явно моделирует, как осторожный, избегающий риска нарушитель мог бы перемещаться по объекту, а затем размещает камеры так, чтобы эти маршруты были максимально видимы.
Как новый метод мыслит как нарушитель
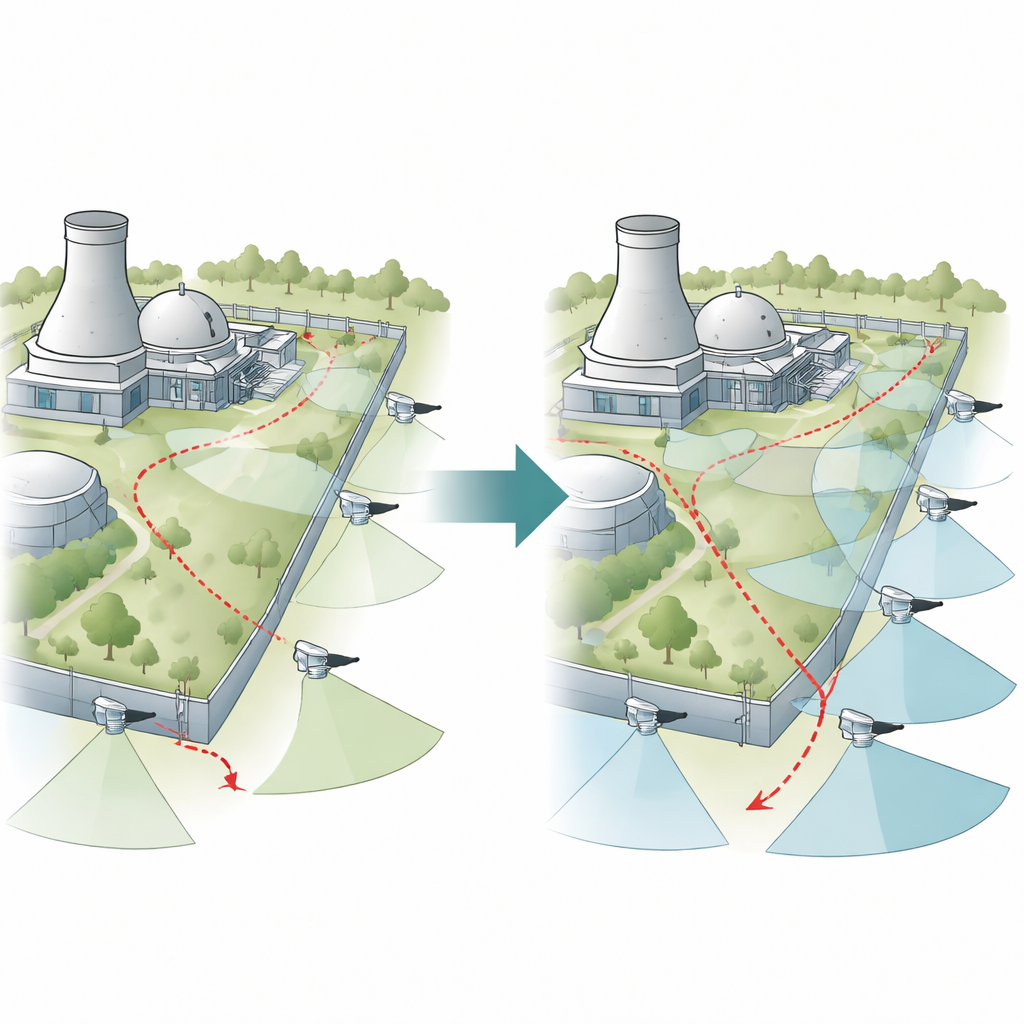
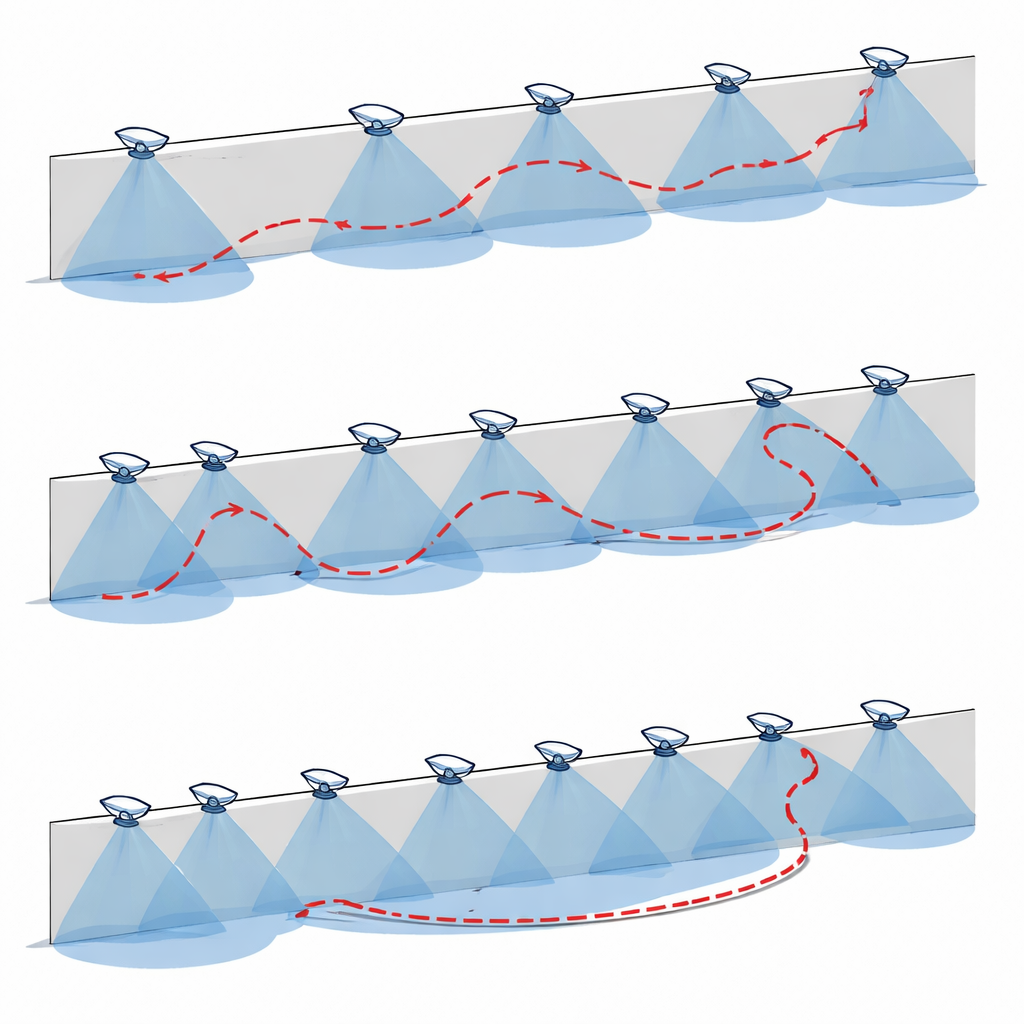
В рамках APP объект представляют в виде цифровой карты, разбитой на множество мелких ячеек, связанных возможными путями движения. Камеры моделируются реалистично: у каждой есть определённая высота, поле зрения, максимальная дальность и неизбежная «мертвая» зона у стойки. Алгоритм сначала оценивает, какие пути склонен выбирать нарушитель, предполагая, что он стремится минимизировать шанс быть замеченным и знает текущее расположение камер. Затем он ищет размещение камер, которое повысит вероятность обнаружения вдоль этих предпочтительных маршрутов, при этом укладываясь в бюджет по числу устройств. После каждого этапа размещения пути нарушителя пересчитываются, уже реагируя на новую картину наблюдения. Это «взаимодействие» повторяется до тех пор, пока обе стороны не «устаканятся», в результате чего получается схема, устойчивая к адаптивной, разумной угрозе.
Тестирование идеи на модели атомной электростанции
Чтобы проверить практическую эффективность, исследователи применили APP к широко используемой гипотетической планировке атомной электростанции, известной как Lone Pine Nuclear Power Plant, разработанной Международным агентством по атомной энергии в качестве эталона безопасности. Станция разделена на зоны с различной степенью важности, окружена заборами и сторожевыми башнями. Для каждого участка периметра команда рассмотрела множество типов камер и позиций, оценивая их по дальности обзора, детализации изображения и размеру зоны слепоты у стойки. APP затем выбирал комбинации камер, которые в совокупности прикрывали наиболее опасные пути к важным зданиям, таким как диспетчерская и зоны поддержки реактора.
Насколько безопаснее и экономичнее может стать наблюдение?
Результаты показывают, что антиципативный подход окупается. По сравнению с базовой схемой и несколькими популярными методами оптимизации, вдохновлёнными природой — такими как генетические алгоритмы, рой частиц и муравьиные алгоритмы — подход APP добился примерно 95% покрытия критических зон и 98% вероятности обнаружения нарушителя на наиболее опасных маршрутах. При этом он сократил зоны слепоты у камер на 85% и уменьшил число камер с 50 до 30. Поскольку каждая камера требует затрат на установку, питание и обслуживание, это привело к приблизительно 27% повышению экономической эффективности. Глубокое сравнение и статистические тесты показали, что эти улучшения были не случайными совпадениями, а стабильным преимуществом по сравнению с конкурирующими методами.
Ограничения, дальнейшие шаги и значение за пределами атомных станций
Как и любое моделирование, эта работа предполагает идеальные условия: ясную погоду, исправное оборудование и одного нарушителя, действующего рационально и осторожно. В реальности объекты сталкиваются с туманом, бликами, отказами оборудования и возможной координацией групп. Тем не менее рамочная модель предлагает мощный инструмент планирования на этапе проектирования, до заливки фундамента и установки опор. Та же стратегия может помочь обезопасить границы, аэропорты, промышленные предприятия или большие общественные пространства, изменив вопрос с «Сколько камер мы можем позволить?» на «Как сделать путь нарушителя максимально видимым?» Авторы предполагают, что в будущем этот планировщик можно связать с ИИ для анализа живого видео или с мобильными датчиками, такими как дроны, создавая системы наблюдения, которые не только хорошо разработаны на бумаге, но и способны адаптироваться в реальном времени по мере эволюции угроз.
Что это значит для повседневной безопасности
Для неспециалистов главный вывод таков: больше камер не всегда означает лучшую безопасность. Важнее то, насколько сеть камер предвосхищает поведение людей. Явно моделируя, как думают и двигаются нарушители, метод Adversarial Path Planning показывает, что можно лучше контролировать критические объекты, используя меньше устройств и снижая затраты. При широком внедрении подобные подходы могут сделать как объекты с высоким риском, так и повседневные общественные пространства безопаснее, умнее и более устойчивыми, не ограничиваясь простым наращиванием аппаратуры.
Цитирование: Salman, A.E., Shaaban, N., Zidan, W.I. et al. Adversarial path planning for optimal CCTV surveillance: a case study on nuclear facility security optimization. Sci Rep 16, 12697 (2026). https://doi.org/10.1038/s41598-026-47647-8
Ключевые слова: безопасность ядерных объектов, видеонаблюдение CCTV, планирование враждебных маршрутов, критическая инфраструктура, оптимизация размещения камер