Clear Sky Science · de
Gegnerische Pfadplanung für optimale CCTV‑Überwachung: eine Fallstudie zur Sicherheitsoptimierung von Atomanlagen
Warum intelligentere Kameras für die öffentliche Sicherheit wichtig sind
Von Flughäfen bis zu Straßen in Städten sollen Überwachungskameras Probleme erkennen, bevor sie Menschen oder kritische Anlagen erreichen. Dennoch können selbst dichte Kameranetze blinde Flecken lassen, die ein entschlossener Eindringling ausnutzen könnte. Diese Studie untersucht eines der denkbar folgenreichsten Szenarien – ein Kernkraftwerk – und zeigt, wie die Annahme, potenzielle Eindringlinge seien strategische Planer statt zufällige Störer, die Montage und Platzierung von Kameras deutlich verbessern kann.
Neu denken, wie wir Überwachungskameras platzieren
Traditionelle Kameralayouts werden meist von Experten anhand von Erfahrung, einfacher Geometrie oder generischen Optimierungswerkzeugen entworfen. Diese Methoden konzentrieren sich überwiegend darauf, bei einer festgelegten Anzahl von Kameras möglichst viel Fläche abzudecken. Selten wird gefragt: „Wenn ich ein Eindringling wäre, welchen Weg würde ich wählen, um nicht gesehen zu werden?“ Die Autorinnen und Autoren betonen, dass diese Lücke in hochriskanten Einrichtungen wie Kernanlagen kritisch ist, wo ein einziger erfolgreicher Einbruch schwerwiegende Folgen haben könnte. Sie schlagen einen Ansatz vor, der als Adversarial Path Planning (APP, gegnerische Pfadplanung) bezeichnet wird: Er modelliert explizit, wie sich ein vorsichtiger, risikoscheuer Eindringling durch eine Anlage bewegen könnte, und arrangiert die Kameras so, dass diese Routen möglichst gut sichtbar werden.
Wie die neue Planungsmethode wie ein Eindringling denkt
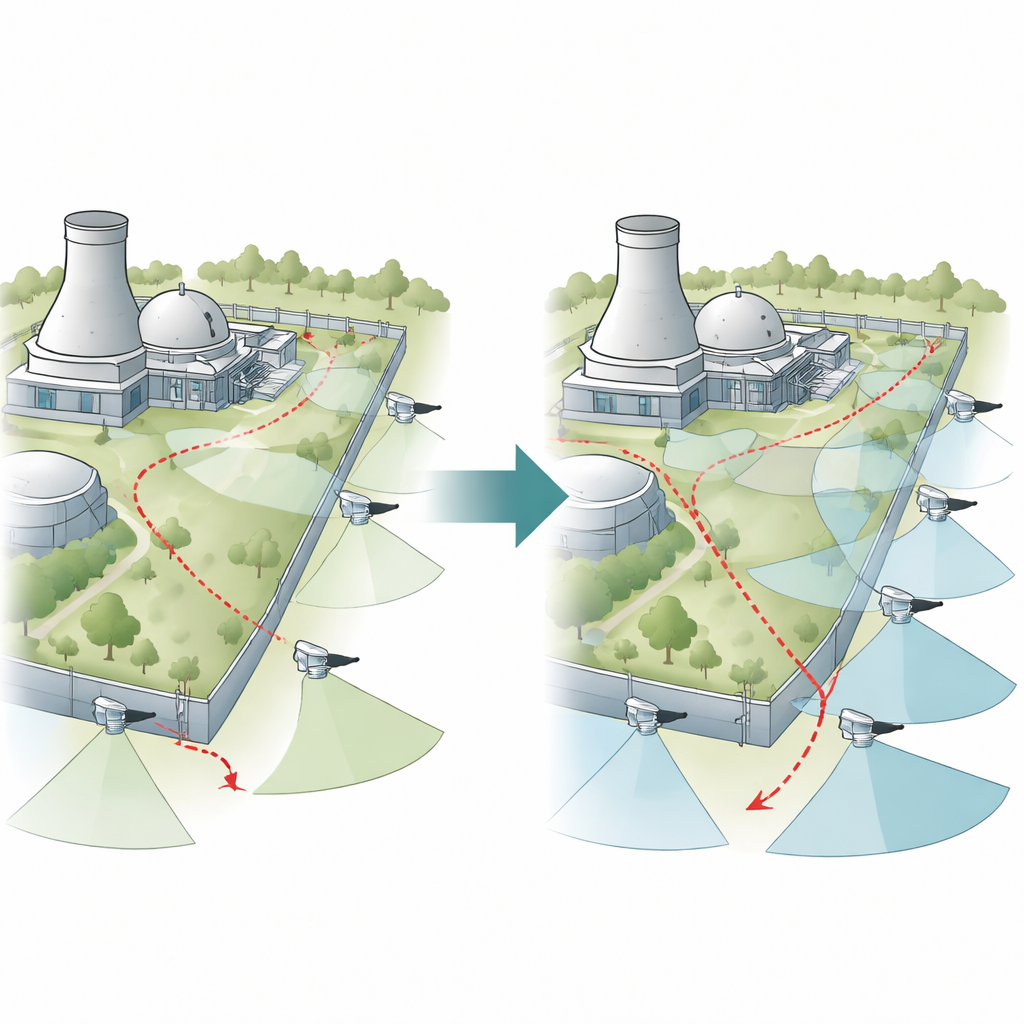
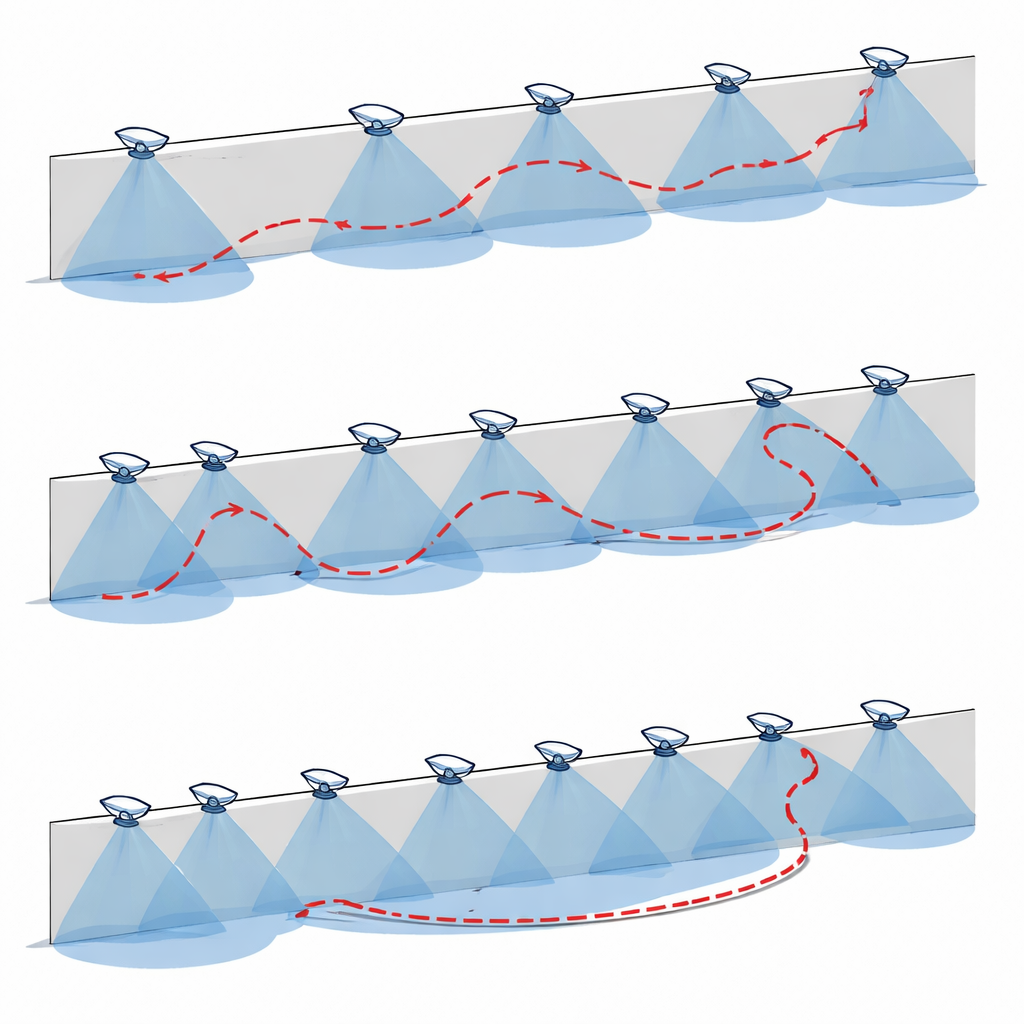
Im APP‑Rahmen wird die Anlage in eine digitale Karte aus vielen kleinen Zellen verwandelt, die durch mögliche Bewegungswege verbunden sind. Kameras werden realistisch modelliert: Jede hat eine bestimmte Höhe, ein Sichtfeld, eine maximale Reichweite und eine unvermeidliche tote Zone nahe dem Mast. Der Algorithmus schätzt zunächst, welche Pfade ein Eindringling favorisieren würde, unter der Annahme, dass er die Wahrscheinlichkeit, entdeckt zu werden, minimieren und die aktuelle Kamerapositionierung berücksichtigen möchte. Anschließend sucht er nach Kamerapositionen, die die Entdeckungswahrscheinlichkeit entlang dieser bevorzugten Routen erhöhen, während die Gesamtzahl der Kameras innerhalb eines Budgets bleibt. Nach jeder Platzierungsrunde werden die Eindringlingspfade neu berechnet, sodass sie auf das veränderte Überwachungsmuster reagieren. Dieses Hin und Her setzt sich fort, bis sich beide Seiten „einig“ sind und ein Layout entsteht, das robust gegen eine adaptive, intelligente Bedrohung ist.
Test des Konzepts an einem Modellkraftwerk
Um die praktische Wirksamkeit zu prüfen, wendeten die Forschenden APP auf einen weit verbreiteten hypothetischen Kraftwerksplan an, bekannt als Lone Pine Nuclear Power Plant, den die Internationale Atomenergiebehörde als Sicherheitsbenchmark entwickelt hat. Die Anlage ist in Zonen mit unterschiedlicher Bedeutung unterteilt und von Zäunen und Wachtürmen umgeben. Für jeden Abschnitt des Perimeters evaluierte das Team viele mögliche Kameratypen und -positionen und bewertete sie danach, wie weit sie sehen konnten, wie viele Details sie lieferten und wie groß die tote Zone in der Nähe des Mastes war. APP wählte dann Kamerakombinationen aus, die gemeinsam die gefährlichsten Wege zu wichtigen Gebäuden wie dem Kontrollraum und den Reaktorunterstützungsbereichen überwachten.
Wie viel sicherer und günstiger kann Überwachung werden?
Die Ergebnisse zeigen, dass sich die gegnerische Betrachtung auszahlt. Verglichen mit einem Baseline‑Layout und mehreren populären, von der Natur inspirierten Optimierungstechniken – wie genetischen Algorithmen, Partikelschwärmen und Ameisenkolonien – erreichte der APP‑Ansatz etwa 95 % Abdeckung kritischer Bereiche und eine 98%ige Wahrscheinlichkeit, einen Eindringling entlang der besorgniserregendsten Routen zu fassen. Gleichzeitig reduzierte er nahe Kameras liegende tote Zonen um 85 % und verringerte die Kamerazahl von 50 auf 30. Da jede Kamera Installations-, Strom‑ und Wartungskosten verursacht, entsprach dies einer ungefähren Steigerung der Kosteneffizienz um 27 %. Eine gründliche Vergleichsanalyse und statistische Tests zeigten, dass diese Verbesserungen keine Glücksfälle waren, sondern konsistente Vorteile gegenüber konkurrierenden Methoden.
Beschränkungen, nächste Schritte und warum es über Kraftwerke hinaus relevant ist
Wie jede Simulationsstudie geht diese Arbeit von idealen Bedingungen aus: klarem Wetter, einwandfrei funktionierender Ausrüstung und einem einzelnen Eindringling, der sich rational und risikoscheu verhält. In der Realität gibt es Nebel, Blendung, Hardwareausfälle und möglicherweise koordinierte Gruppen. Dennoch bietet das Framework ein leistungsfähiges Planungsinstrument für die Entwurfsphase, bevor Beton gegossen und Masten aufgestellt werden. Dieselbe Strategie könnte helfen, Grenzen, Flughäfen, Industrieanlagen oder große öffentliche Orte zu sichern, indem die Frage von „Wie viele Kameras können wir uns leisten?“ zu „Wie machen wir den sichersten Weg eines Eindringlings am sichtbarsten?“ umformuliert wird. Die Autorinnen und Autoren schlagen vor, die Planungsmaschine künftig mit künstlicher Intelligenz zur Analyse von Live‑Video oder mit mobilen Sensoren wie Drohnen zu verknüpfen, um Überwachungssysteme zu schaffen, die nicht nur auf dem Papier gut gestaltet sind, sondern sich auch in Echtzeit an sich entwickelnde Bedrohungen anpassen können.
Was das für die alltägliche Sicherheit bedeutet
Für Nicht‑Spezialisten lautet die Kernbotschaft: Mehr Kameras bedeuten nicht automatisch bessere Sicherheit. Entscheidend ist, wie gut ein Kameranetz menschliches Verhalten antizipiert. Indem es explizit modelliert, wie Eindringlinge denken und sich bewegen, zeigt die Methode der Adversarial Path Planning, dass es möglich ist, kritische Orte gründlicher zu überwachen – mit weniger Geräten und geringeren Kosten. Bei breiter Anwendung könnten solche Ansätze sowohl hochriskante Industrieanlagen als auch öffentliche Räume sicherer, intelligenter und widerstandsfähiger machen, ohne einfach alles mit Hardware zu überziehen.
Zitation: Salman, A.E., Shaaban, N., Zidan, W.I. et al. Adversarial path planning for optimal CCTV surveillance: a case study on nuclear facility security optimization. Sci Rep 16, 12697 (2026). https://doi.org/10.1038/s41598-026-47647-8
Schlüsselwörter: nukleare Sicherheit, CCTV‑Überwachung, gegnerische Pfadplanung, kritische Infrastruktur, Optimierung der Kamerapositionierung