Clear Sky Science · fr
Planification d’itinéraire adversaire pour une surveillance CCTV optimale : étude de cas sur l’optimisation de la sécurité d’une installation nucléaire
Pourquoi des caméras plus intelligentes comptent pour la sécurité publique
Des aéroports aux rues de la ville, les caméras de sécurité sont censées repérer les incidents avant qu’ils n’affectent des personnes ou des équipements critiques. Pourtant, même des réseaux denses de caméras peuvent laisser des angles morts qu’un intrus déterminé pourrait exploiter. Cette étude examine l’un des contextes les plus sensibles qui soient — une centrale nucléaire — et montre qu’en considérant les éventuels intrus comme des planificateurs stratégiques plutôt que comme des débiteurs aléatoires, on peut améliorer de façon spectaculaire le choix et l’emplacement des caméras.
Réinventer le placement des caméras de sécurité
Les schémas de caméras traditionnels sont généralement conçus par des experts selon leur expérience, des principes géométriques simples ou des outils d’optimisation génériques. Ces méthodes visent principalement à couvrir le plus d’espace possible avec un nombre fixe de caméras. Elles se demandent rarement : « Si j’étais un intrus, quel itinéraire choisirais‑je pour éviter d’être vu ? » Les auteurs soutiennent que ce manque est critique sur des sites à haut risque comme les installations nucléaires, où une intrusion réussie pourrait avoir de graves conséquences. Ils proposent une approche appelée Planification d’Itinéraire Adversaire (PIA), qui modélise explicitement comment un intrus prudent et aversif au risque pourrait se déplacer dans une installation, puis dispose les caméras pour rendre ces itinéraires aussi visibles que possible.
Comment la nouvelle méthode raisonne comme un intrus
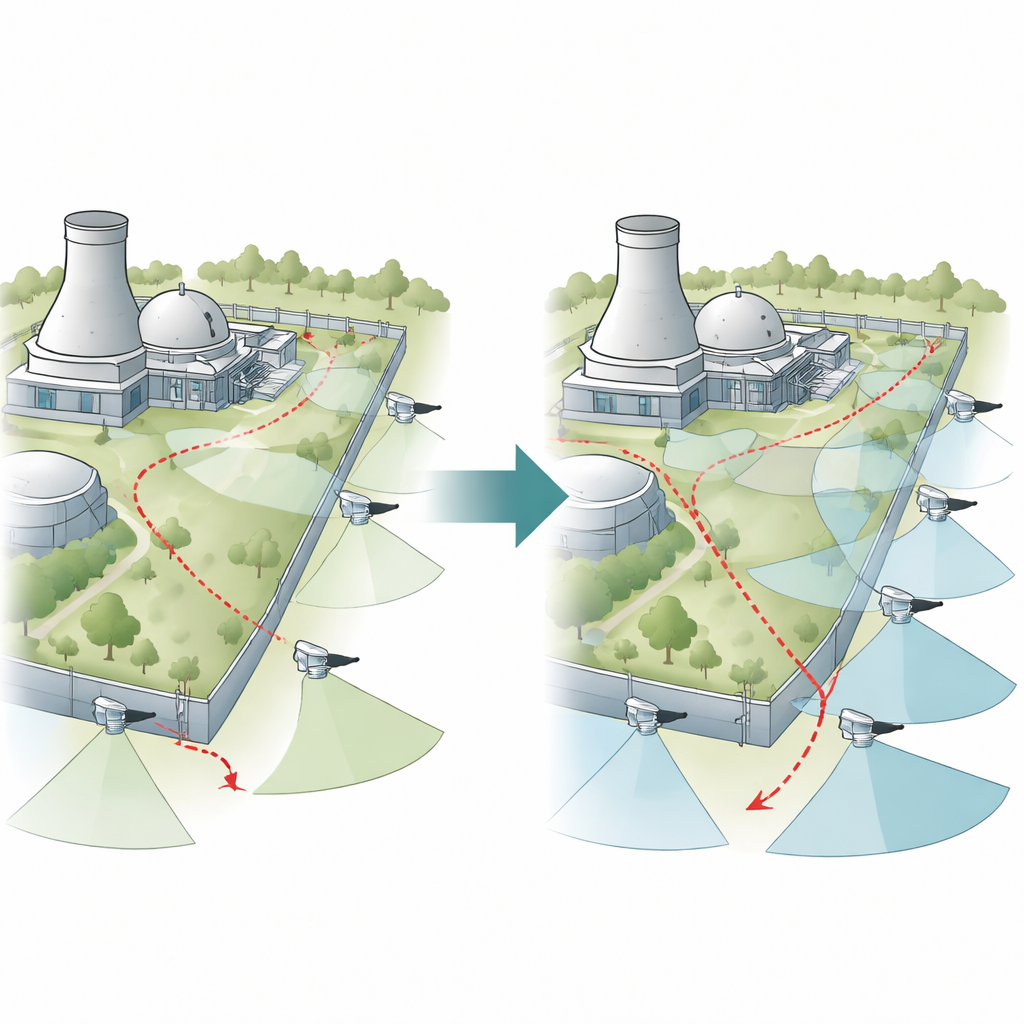
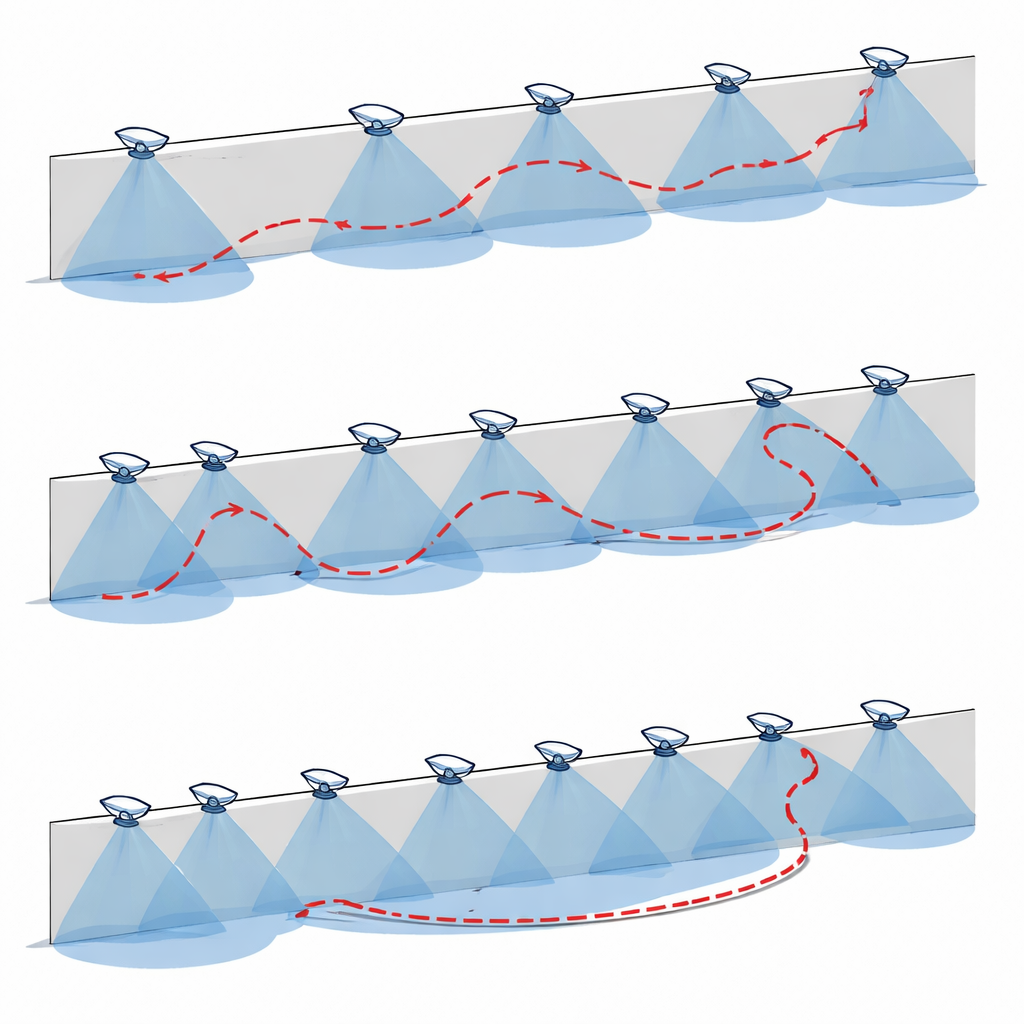
Dans le cadre PIA, l’installation est transformée en une carte numérique composée de nombreuses petites cellules, reliées par des chemins de déplacement possibles. Les caméras sont modélisées de manière réaliste : chacune a une hauteur spécifique, un champ de vision, une portée maximale et une zone aveugle inévitable près du poteau. L’algorithme estime d’abord quels chemins un intrus privilégierait, en supposant qu’il cherche à minimiser la probabilité d’être repéré et qu’il connaît la configuration actuelle des caméras. Il recherche ensuite des placements de caméras qui augmentent la probabilité de détection le long de ces itinéraires préférentiels tout en respectant un budget total de caméras. Après chaque cycle de placement, les chemins de l’intrus sont recomputés, réagissant à la nouvelle configuration de surveillance. Cet aller‑retour se poursuit jusqu’à ce que les deux parties « se stabilisent », produisant une disposition robuste face à une menace adaptative et intelligente.
Tester l’idée sur un modèle de centrale nucléaire
Pour évaluer l’efficacité en pratique, les chercheur·e·s ont appliqué la PIA à un plan hypothétique largement utilisé de centrale nucléaire connu sous le nom de Lone Pine Nuclear Power Plant, développé par l’Agence internationale de l’énergie atomique comme référence de sécurité. L’usine est divisée en zones d’importance variable, entourée de clôtures et de tours de garde. Pour chaque section du périmètre, l’équipe a évalué de nombreux types et emplacements de caméras, en les notant selon leur portée, le niveau de détail fourni et l’ampleur de la zone morte qu’elles créent près du poteau. La PIA a ensuite sélectionné des combinaisons de caméras qui, collectivement, couvraient au mieux les itinéraires les plus dangereux menant aux bâtiments vitaux comme la salle de contrôle et les zones de support du réacteur.
À quel point la surveillance peut‑elle devenir plus sûre et moins coûteuse ?
Les résultats montrent que l’approche adversariale rapporte. Par rapport à une configuration de référence et à plusieurs techniques d’optimisation populaires inspirées de la nature — comme les algorithmes génétiques, les essaims de particules et les colonies de fourmis — la PIA a obtenu environ 95 % de couverture des zones critiques et une probabilité de 98 % d’intercepter un intrus le long des itinéraires les plus préoccupants. Parallèlement, elle a réduit les zones aveugles proches des caméras de 85 % et diminué le nombre de caméras de 50 à 30. Comme chaque caméra entraîne des coûts d’installation, d’alimentation et d’entretien, cela s’est traduit par une amélioration d’environ 27 % de l’efficacité des coûts. Une comparaison approfondie et des tests statistiques ont montré que ces améliorations n’étaient pas de simples coups de chance, mais des avantages constants par rapport aux méthodes concurrentes.
Limites, pistes futures et pourquoi cela dépasse les centrales nucléaires
Comme toute étude par simulation, ce travail suppose des conditions idéales : temps clair, équipement parfaitement fonctionnel et un intrus unique se comportant de manière rationnelle et aversive au risque. Les installations réelles doivent composer avec le brouillard, l’éblouissement, les pannes matérielles et éventuellement des groupes coordonnés. Néanmoins, le cadre offre un outil de planification puissant pour la phase de conception, avant que le béton ne soit coulé et que les poteaux soient érigés. La même stratégie pourrait aider à sécuriser des frontières, des aéroports, des usines industrielles ou de grands lieux publics en transformant la question « Combien de caméras pouvons‑nous nous permettre ? » en « Comment rendre l’itinéraire le plus sûr pour un intrus le plus visible possible ? » Les auteurs suggèrent que des travaux futurs pourraient connecter ce moteur de planification à de l’intelligence artificielle analysant la vidéo en direct, ou à des capteurs mobiles tels que des drones, créant des systèmes de surveillance non seulement bien conçus sur le papier mais aussi capables de s’adapter en temps réel à l’évolution des menaces.
Ce que cela signifie pour la sécurité quotidienne
Pour les non‑spécialistes, la conclusion est que plus de caméras ne signifie pas automatiquement une meilleure sécurité. Ce qui compte, c’est la capacité d’un réseau de caméras à anticiper le comportement humain. En modélisant explicitement la façon dont les intrus pensent et se déplacent, la méthode de Planification d’Itinéraire Adversaire montre qu’il est possible de surveiller les lieux critiques plus efficacement, avec moins d’appareils et à moindre coût. Si elle était largement adoptée, une approche de ce type pourrait rendre à la fois les sites industriels à haut risque et les espaces publics quotidiens plus sûrs, plus intelligents et plus résilients sans se contenter de tout recouvrir de matériel.
Citation: Salman, A.E., Shaaban, N., Zidan, W.I. et al. Adversarial path planning for optimal CCTV surveillance: a case study on nuclear facility security optimization. Sci Rep 16, 12697 (2026). https://doi.org/10.1038/s41598-026-47647-8
Mots-clés: sécurité nucléaire, surveillance CCTV, planification d’itinéraire adversaire, infrastructures critiques, optimisation du placement des caméras