Clear Sky Science · pl
Adwersaryjne planowanie tras dla optymalnej obserwacji CCTV: studium przypadku optymalizacji bezpieczeństwa obiektów jądrowych
Dlaczego inteligentniejsze kamery mają znaczenie dla bezpieczeństwa publicznego
Od lotnisk po ulice miast, kamery bezpieczeństwa mają wykrywać zagrożenia zanim dotrą do ludzi lub krytycznego sprzętu. Mimo to nawet gęsta sieć kamer może pozostawiać martwe pola, które zdeterminowany intruz może wykorzystać. W tym badaniu rozważono jedno z najbardziej ryzykownych środowisk — elektrownię jądrową — i pokazano, że traktowanie potencjalnych włamywaczy jako strategicznych plannerów, zamiast jako losowych naruszycieli, może znacząco poprawić sposób i miejsca instalacji kamer.
Przeprojektowanie rozmieszczania kamer bezpieczeństwa
Tradycyjne układy kamer zwykle projektują eksperci, korzystając z doświadczenia, prostych metod geometrycznych lub ogólnych narzędzi optymalizacyjnych. Metody te koncentrują się głównie na pokryciu jak największej powierzchni przy ograniczonej liczbie kamer. Rzadko zadaje się pytanie: „Gdybym był intruzem, którą trasę wybrałbym, aby uniknąć wykrycia?” Autorzy podkreślają, że ta luka jest kluczowa w miejscach wysokiego ryzyka, takich jak obiekty jądrowe, gdzie pojedyncze udane wtargnięcie może mieć poważne konsekwencje. Proponują podejście zwane Adversarial Path Planning (APP), które wprost modeluje, jak ostrożny intruz unikający ryzyka mógłby poruszać się po obiekcie, a następnie rozmieszcza kamery tak, aby te trasy były jak najbardziej widoczne.
Jak nowa metoda planowania myśli jak intruz
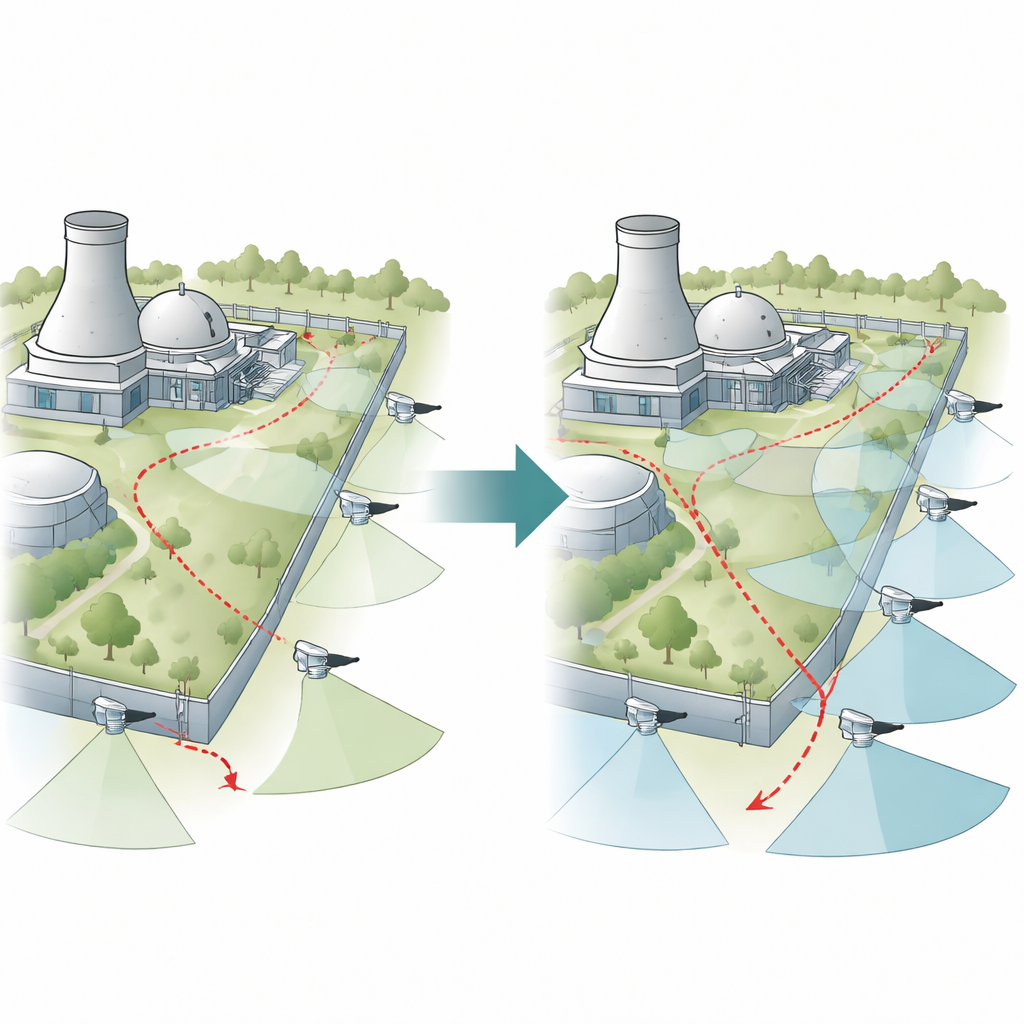
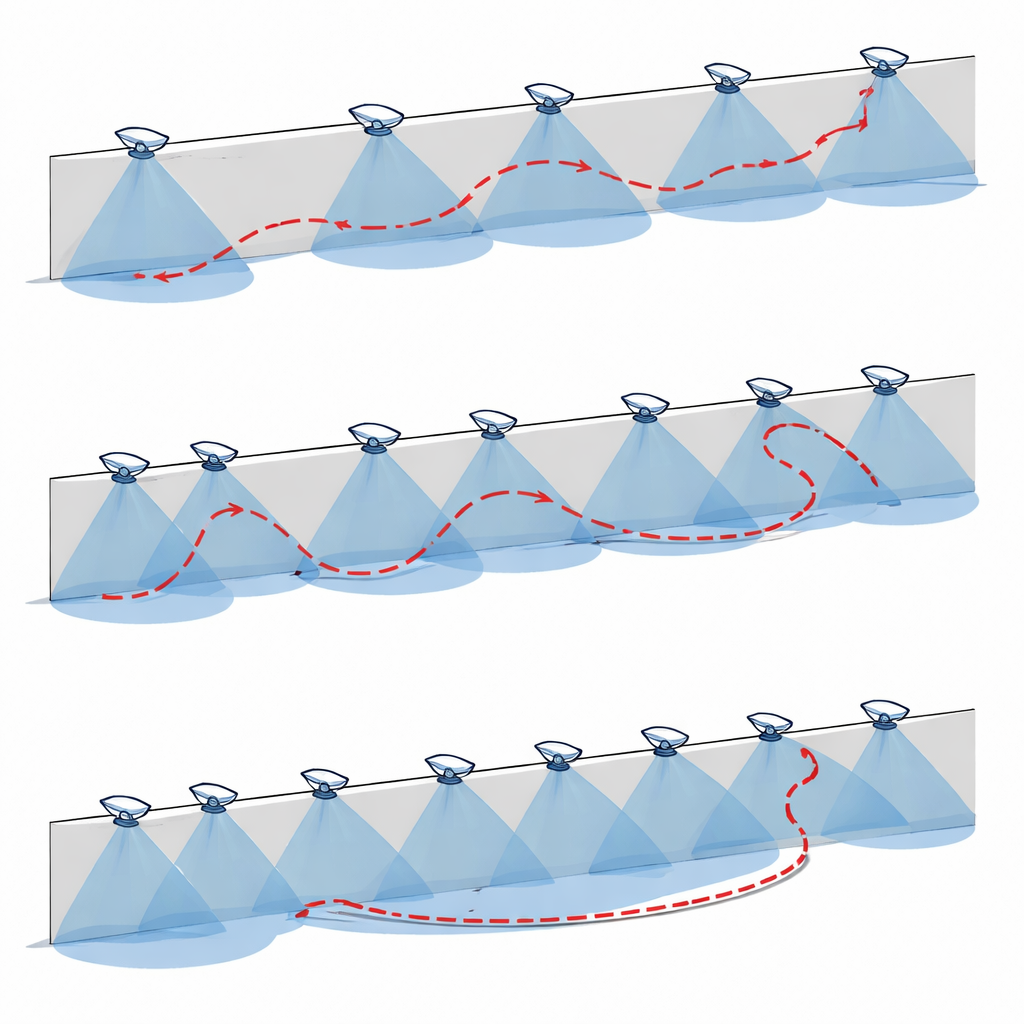
W ramach APP obiekt zostaje przekształcony w mapę cyfrową składającą się z wielu małych komórek, połączonych możliwymi ścieżkami ruchu. Kamery są modelowane realistycznie: każda ma określoną wysokość, pole widzenia, maksymalny zasięg oraz nieuniknione martwe pole blisko maszty. Algorytm najpierw estymuje, które trasy intruz by faworyzował, zakładając, że chce zminimalizować szansę wykrycia i zna obecne rozmieszczenie kamer. Następnie poszukuje rozmieszczeń kamer, które zwiększają prawdopodobieństwo wykrycia na tych preferowanych trasach, przy jednoczesnym zachowaniu limitu liczby kamer zgodnie z budżetem. Po każdej rundzie rozmieszczeń trasy intruza są ponownie przeliczane, teraz reagując na nowy wzór nadzoru. To przeciwstawne dostosowywanie trwa, aż obie strony „zastygają”, dając układ odporny na adaptacyjne, inteligentne zagrożenie.
Testy pomysłu na modelu elektrowni jądrowej
Aby sprawdzić skuteczność w praktyce, badacze zastosowali APP do powszechnie używanego hipotetycznego układu elektrowni zwanej Lone Pine Nuclear Power Plant, opracowanego przez Międzynarodową Agencję Energii Atomowej jako punkt odniesienia bezpieczeństwa. Zakład podzielony jest na strefy o różnym poziomie znaczenia, otoczony ogrodzeniami i wieżami strażniczymi. Dla każdego odcinka perymetru zespół ocenił wiele możliwych typów i pozycji kamer, punktując je na podstawie zasięgu widzenia, poziomu szczegółów oraz wielkości martwego pola przy maszcie. APP wybrał kombinacje kamer, które łącznie chroniły najbardziej niebezpieczne trasy prowadzące do kluczowych budynków, takich jak pomieszczenie kontrolne czy obszary wsparcia reaktora.
O ile bezpieczniejszy i tańszy może stać się nadzór?
Wyniki pokazują, że myślenie adwersaryjne się opłaca. W porównaniu z układem bazowym oraz kilkoma popularnymi technikami optymalizacyjnymi inspirowanymi naturą — takimi jak algorytmy genetyczne, rój cząstek czy kolonie mrówek — podejście APP osiągnęło około 95% pokrycia obszarów krytycznych i 98% prawdopodobieństwo złapania intruza na najbardziej niepokojących trasach. Jednocześnie zmniejszyło martwe strefy przy kamerach o 85% i zredukowało liczbę kamer z 50 do 30. Ponieważ każda kamera wiąże się z kosztami instalacji, zasilania i konserwacji, przełożyło się to na około 27% wzrost efektywności kosztowej. Szczegółowe porównanie i testy statystyczne wykazały, że te ulepszenia nie były przypadkowe, lecz stanowiły stałą przewagę nad metodami konkurencyjnymi.
Ograniczenia, dalsze kroki i dlaczego ma to znaczenie poza elektrowniami
Jak w każdym badaniu symulacyjnym, praca zakłada warunki idealne: dobrą pogodę, w pełni sprawny sprzęt i pojedynczego intruza zachowującego się racjonalnie i unikającego ryzyka. W rzeczywistych obiektach pojawiają się mgła, odblaski, awarie sprzętu i ewentualnie skoordynowane grupy. Mimo to ramy te oferują potężne narzędzie planistyczne na etapie projektowania, zanim wyleje się beton i postawi maszty. Ta sama strategia może pomóc w zabezpieczeniu granic, lotnisk, zakładów przemysłowych czy dużych obiektów publicznych, zmieniając pytanie z „Ile kamer nas stać?” na „Jak sprawić, by najbezpieczniejsza trasa intruza była jak najbardziej widoczna?” Autorzy sugerują, że dalsze prace mogłyby połączyć ten mechanizm planowania ze sztuczną inteligencją analizującą obraz na żywo lub z mobilnymi sensorami, takimi jak drony, tworząc systemy nadzoru, które nie tylko dobrze się projektuje na papierze, ale też potrafią adaptować się w czasie rzeczywistym wraz z ewolucją zagrożeń.
Co to oznacza dla codziennego bezpieczeństwa
Dla niespecjalistów kluczowy wniosek jest taki, że więcej kamer nie oznacza automatycznie lepszego bezpieczeństwa. Ważne jest, na ile sieć kamer przewiduje ludzkie zachowania. Poprzez jawne modelowanie, jak intruzi myślą i się poruszają, metoda Adversarial Path Planning pokazuje, że można uważniej nadzorować miejsca krytyczne używając mniejszej liczby urządzeń i mniejszych kosztów. Jeśli zostanie szeroko przyjęta, taka metoda mogłaby sprawić, że zarówno obiekty wysokiego ryzyka, jak i codzienne przestrzenie publiczne będą bezpieczniejsze, inteligentniejsze i bardziej odporne, bez prostego pokrywania wszystkiego sprzętem.
Cytowanie: Salman, A.E., Shaaban, N., Zidan, W.I. et al. Adversarial path planning for optimal CCTV surveillance: a case study on nuclear facility security optimization. Sci Rep 16, 12697 (2026). https://doi.org/10.1038/s41598-026-47647-8
Słowa kluczowe: bezpieczeństwo jądrowe, monitoring CCTV, adwersaryjne planowanie tras, infrastruktura krytyczna, optymalizacja rozmieszczenia kamer