Clear Sky Science · en
Adversarial path planning for optimal CCTV surveillance: a case study on nuclear facility security optimization
Why smarter cameras matter for public safety
From airports to city streets, security cameras are meant to spot trouble before it reaches people or critical equipment. Yet even dense networks of cameras can leave blind spots that a determined intruder might exploit. This study looks at one of the highest‑stakes settings imaginable—a nuclear power plant—and shows how treating would‑be intruders as strategic planners, rather than random trespassers, can dramatically improve how and where cameras are installed.
Reimagining how we place security cameras
Traditional camera layouts are usually designed by experts using experience, simple geometry, or generic optimization tools. These methods focus mainly on covering as much floor space as possible with a fixed number of cameras. They rarely ask: “If I were an intruder, which route would I choose to avoid being seen?” The authors argue that this gap is critical in high‑risk sites such as nuclear facilities, where a single successful intrusion could have serious consequences. They propose an approach called Adversarial Path Planning (APP), which explicitly models how a cautious, risk‑avoiding intruder might move through a facility, and then arranges cameras to make those routes as visible as possible.
How the new planning method thinks like an intruder
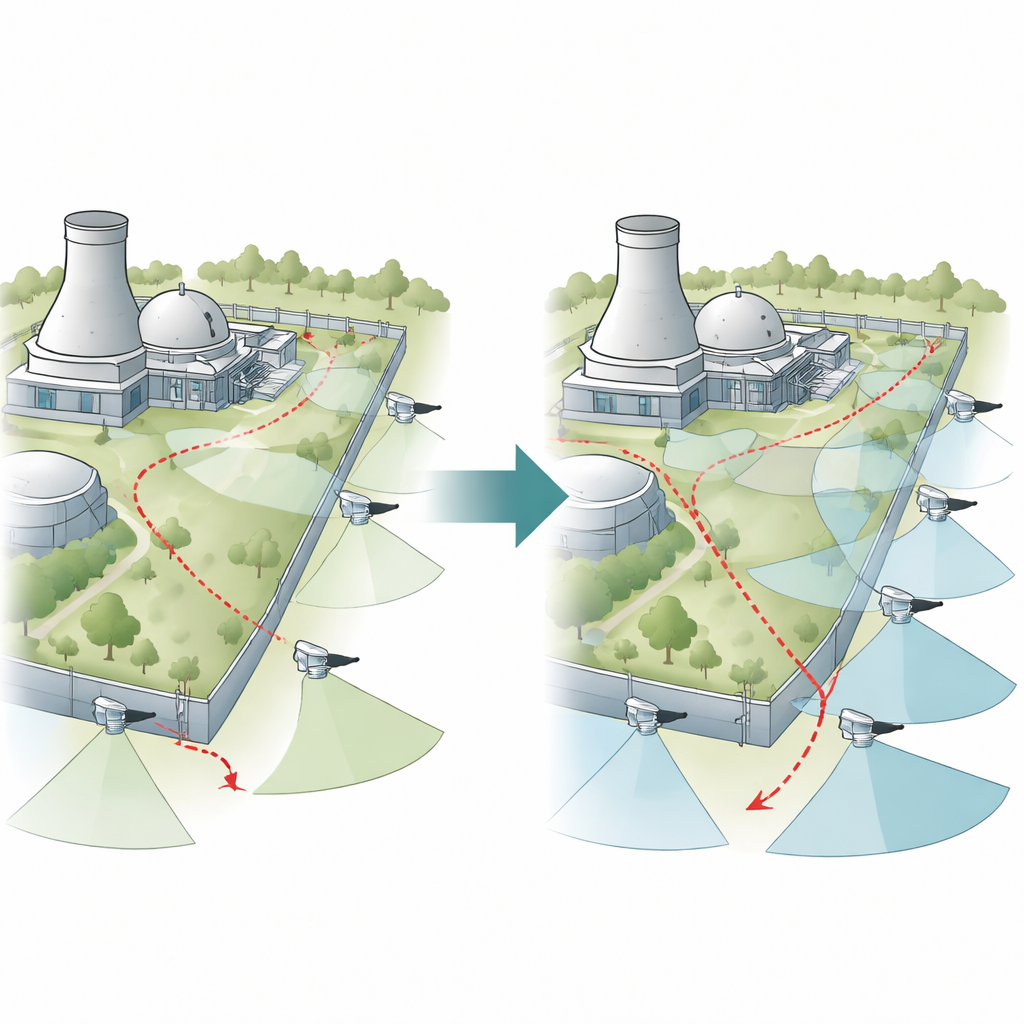
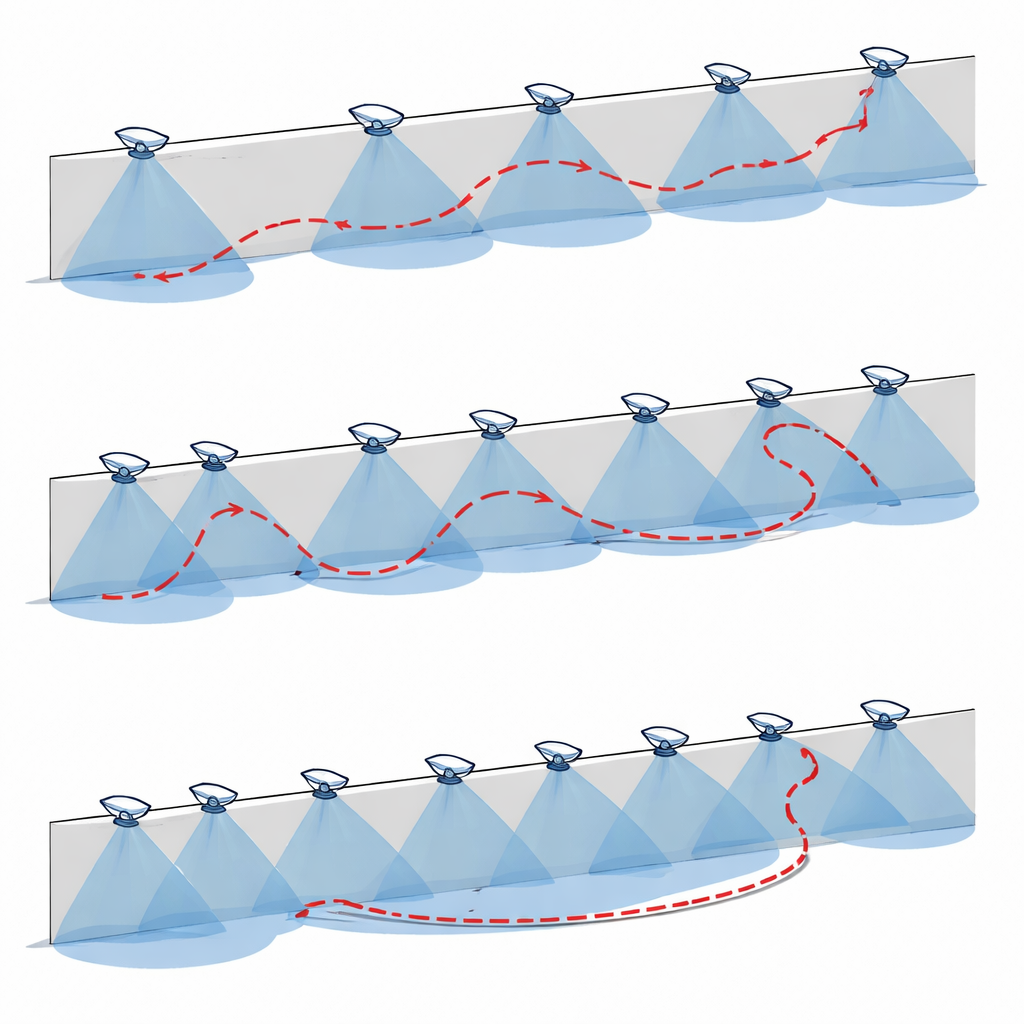
In the APP framework, the facility is transformed into a digital map made of many small cells, each connected by possible movement paths. Cameras are modeled realistically: each has a specific height, field of view, maximum range, and an unavoidable blind area close to the pole. The algorithm first estimates which paths an intruder would favor, assuming they want to minimize the chance of being spotted and understand the current camera layout. It then searches for camera placements that raise the detection chance along these preferred routes while keeping the total number of cameras within a budget. After each round of placement, the intruder paths are recomputed, now reacting to the new surveillance pattern. This back‑and‑forth continues until both sides “settle,” producing a layout that is robust against an adaptive, intelligent threat.
Testing the idea on a model nuclear power plant
To see how well this works in practice, the researchers applied APP to a widely used hypothetical nuclear power plant layout known as the Lone Pine Nuclear Power Plant, developed by the International Atomic Energy Agency as a security benchmark. The plant is divided into zones with different importance levels, surrounded by fences and guard towers. For each section of the perimeter, the team evaluated many possible camera types and positions, scoring them based on how far they could see, how much detail they provided, and how large a dead zone they created near the pole. APP then selected camera combinations that collectively guarded the most dangerous paths into vital buildings like the control room and reactor support areas.
How much safer and cheaper can surveillance become?
The results show that thinking adversarially pays off. Compared with a baseline layout and with several popular optimization techniques inspired by nature—such as genetic algorithms, particle swarms, and ant colonies—the APP approach achieved about 95% coverage of critical areas and a 98% probability of catching an intruder along the most worrisome routes. At the same time, it reduced near‑camera blind zones by 85% and cut the number of cameras from 50 to 30. Because each camera comes with installation, power, and maintenance costs, this translated into a roughly 27% gain in cost efficiency. An in‑depth comparison and statistical testing showed that these improvements were not just lucky runs, but consistent advantages over competing methods.
Limits, future steps, and why it matters beyond nuclear plants
Like any simulation study, this work assumes ideal conditions: clear weather, perfectly working equipment, and a single intruder who behaves in a rational, risk‑averse way. Real facilities face fog, glare, hardware failures, and possibly coordinated groups. Still, the framework offers a powerful planning tool for the design phase, before concrete is poured and poles are erected. The same strategy could help secure borders, airports, industrial plants, or large public venues by turning the question from “How many cameras can we afford?” into “How can we make an intruder’s safest path as visible as possible?” The authors suggest that future work could link this planning engine to artificial intelligence that analyzes live video, or to mobile sensors such as drones, creating surveillance systems that are not only well designed on paper but can also adapt in real time as threats evolve.
What this means for everyday security
For non‑specialists, the take‑home message is that more cameras do not automatically mean better security. What matters is how well a camera network anticipates human behavior. By explicitly modeling how intruders think and move, the Adversarial Path Planning method shows that it is possible to watch over critical places more thoroughly, with fewer devices and lower costs. If adopted widely, approaches like this could make both high‑risk industrial sites and everyday public spaces safer, smarter, and more resilient without simply blanketing everything in hardware.
Citation: Salman, A.E., Shaaban, N., Zidan, W.I. et al. Adversarial path planning for optimal CCTV surveillance: a case study on nuclear facility security optimization. Sci Rep 16, 12697 (2026). https://doi.org/10.1038/s41598-026-47647-8
Keywords: nuclear security, CCTV surveillance, adversarial path planning, critical infrastructure, camera placement optimization