Clear Sky Science · sv
Två-sensors koherensdriven adaptiv avbrusning (WF-VMD-DDCDO) för detektion av undervattensmål
Lyssna efter fartyg utan ljud
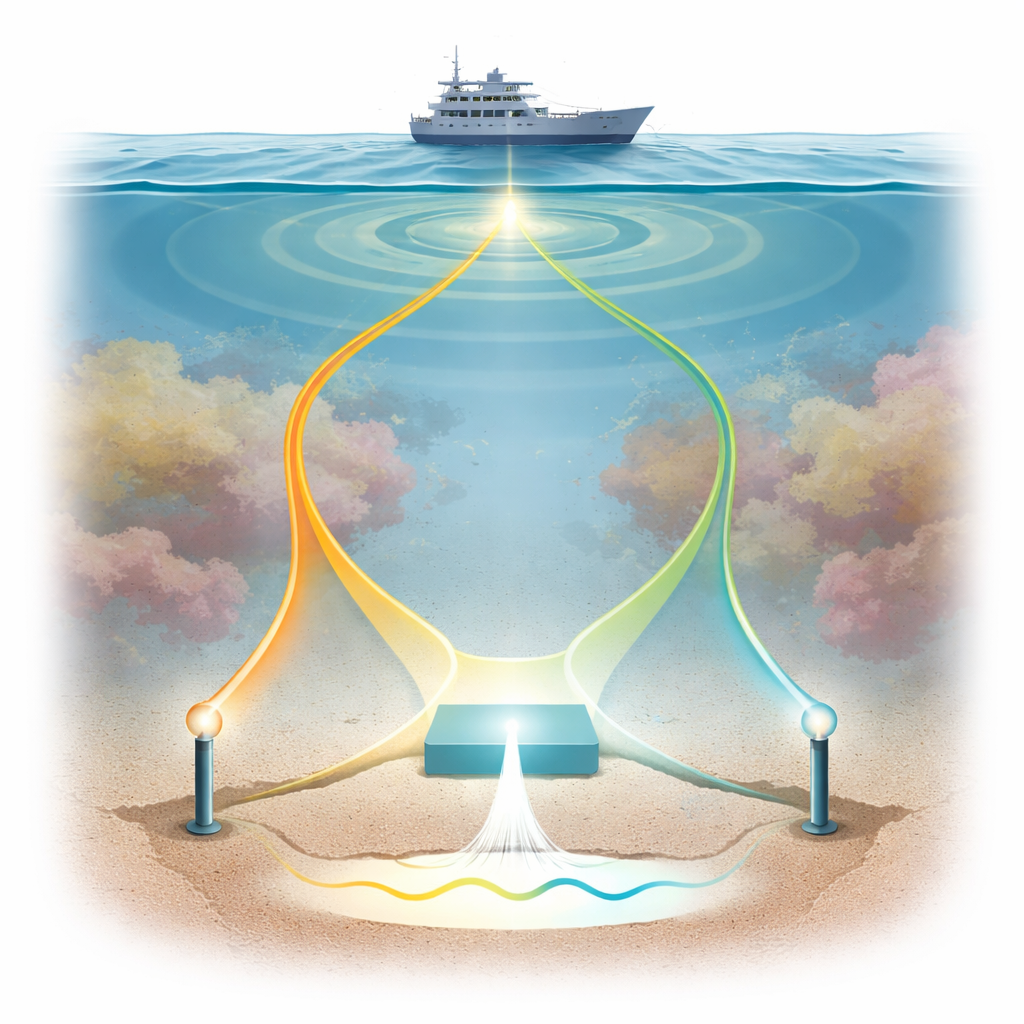
Fartyg och ubåtar lämnar svaga magnetiska fingeravtryck i vattnet när deras metalldelar interagerar med havsvatten och skyddande elsystem. Dessa extremt lågfrekventa signaler kan färdas flera kilometer och erbjuder ett sätt att upptäcka undervattensfarkoster utan att använda ljud. Men i öppet hav ligger dessa magnetiska spår begravda under kraftigt bakgrundsbrus och andra människoskapade signaler. Denna artikel presenterar en ny flerstegsmetod som kan plocka fram ett fartygs magnetiska ”hjärtslag” även när det ligger långt under brusnivån, vilket gör långdistans- och tyst detektion mer praktisk.
En dold fyr från vridande axlar
När ett fartyg rör sig roterar dess propelleraxel med en jämn hastighet. Denna rörelse förändrar subtilt den elektriska kontakten mellan olika metaller på fartyget och modulerar både korrosionsströmmar och skyddande strömmar som flyter genom havsvattnet. Resultatet är ett mycket lågfrekvent elektromagnetiskt fält vars huvudton motsvarar axelns rotationshastighet och vars energi kan färdas långa avstånd med liten dämpning. I teorin är detta axel-frekvensfält en idealisk spårningsfyr. I praktiken maskeras det av komplext ”färgat” brus från jordens magnetiska omgivning och av starka störningslinjer från kraftsystem och annan utrustning, särskilt i grunt vatten där traditionella akustiska metoder redan har svårt.
Två öron istället för ett
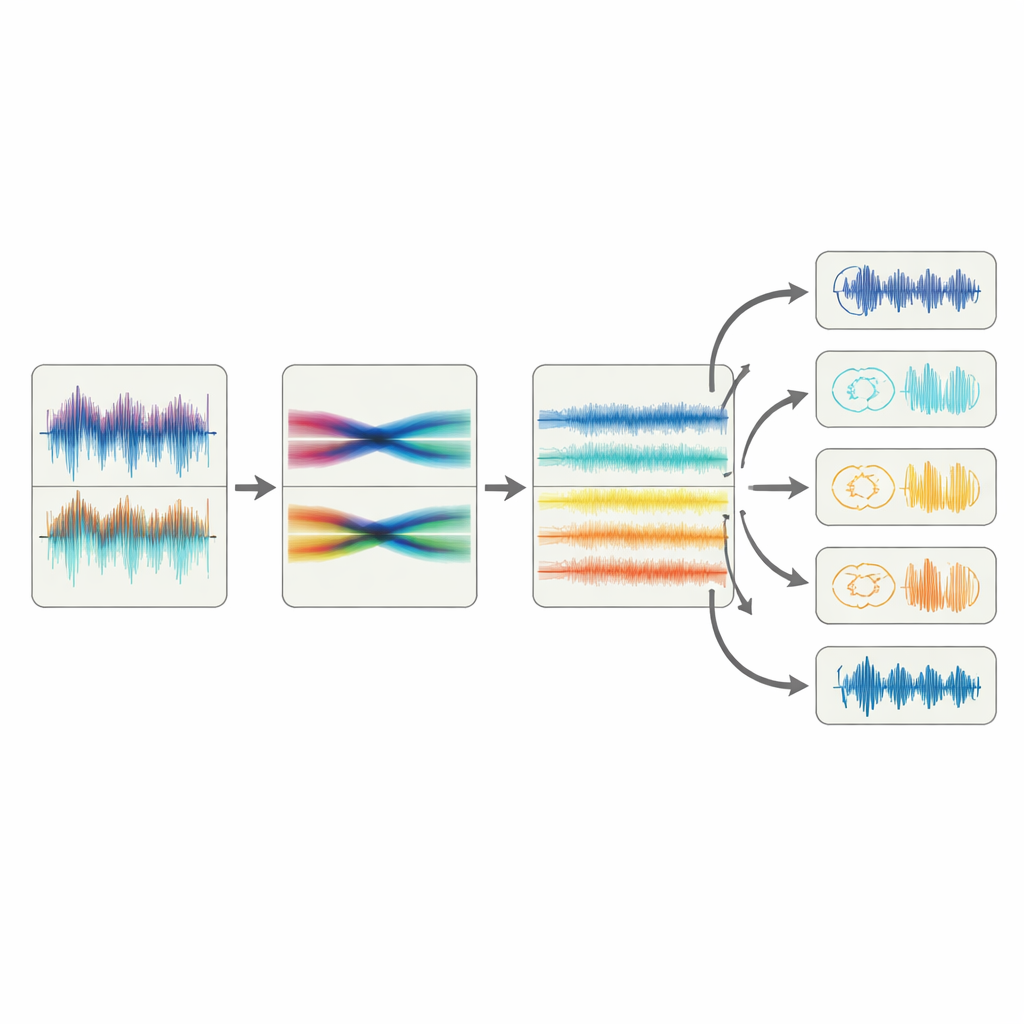
Författarnas första idé är att behandla fartygens axelfrekvensfält som en koherent, alltså delad, signal som når två sensorer på ett relaterat sätt, medan det mesta bakgrundsbruset ser likartat ut på båda platserna. De placerar ett par identiska magnetometrar en bit ifrån varandra på havsbotten. Genom att jämföra de två dataströmmarna i frekvensdomänen uppskattar de hur det verkliga målfältet transformeras mellan sensorerna och använder denna ”överföringsfunktion” för att förstärka det som är gemensamt i de två datamängderna och avbryta det som inte matchar. Detta steg för koherent signalförstärkning reducerar kraftigt störningslinjer och stora delar av det omgivande magnetiska bruset innan ytterligare bearbetning utförs.
Att tygla färgat brus och dela upp signalen
Även efter koherensbearbetning beter sig det kvarvarande bakgrundsbruset väldigt annorlunda än det idealiserade slumpbrus som antas i många algoritmer. För att jämna ut detta applicerar teamet ett whitening-filter som omformar spektrumet så att brusenergin blir mer jämnt fördelad över frekvenser, utan att förskjuta den verkliga axelfrekvensen. Därefter följer variational mode decomposition, ett matematiskt grundat sätt att dela upp den rensade signalen i flera enklare band, där varje band täcker ett annat snitt av spektrumet. I dessa intrinsiska moduler kan det dolda axelfrekvensfältet framträda tydligare från det återstående bruset än i den ursprungliga blandade signalen.
Låta kaos peka på målet
Den sista detektionsfasen använder ett särskilt utformat kaotiskt system kallat differential double-coupled Duffing-oscillator. Denna icke-linjära oscillator är ovanligt känslig för små periodiska insignal: när dess interna drivfrekvens sveper över den okända axelfrekvensen går systemet kortvarigt in i ett distinkt intermittent tillstånd två gånger i följd. Genom att skanna varje dekomponerat signalband och leta efter dessa parade övergångar kan metoden bekräfta närvaron av axelfrekvensfältet och uppskatta dess frekvens. Författarna automatiserar vidare detta steg genom att använda ett mått kallat sample entropy för att välja precis rätt drivstyrka, vilket säkerställer att oscillatoren svarar tillförlitligt utan att luras av brus.
Bevisa att det fungerar i labbet och i fält
Forskarlaget testar hela kedjan—koherent förstärkning, whitening, dekomposition och kaotisk detektion—på syntetiska signaler och på verkliga mätningar tagna vid en sjö med en spole som imiterar ett fartygs axelfrekvensfält. De jämför prestanda mot wavelet-avbrusning, adaptiv linjeförstärkning, djupa inlärningsmodeller och tidigare Duffing-baserade tillvägagångssätt. Medan många av dessa metoder misslyckas när signalen ligger 20 till 40 decibel under bruset, identifierar den nya metoden fortfarande axelfrekvensen korrekt i de flesta fall och håller falsklarm låga. I ett fältscenario med en signal begravd mer än 50 decibel under brus uppnår metoden över 95 procent träffsäkerhet.
Vad detta betyder för tyst oceanövervakning
Enkelt uttryckt visar detta arbete att det magnetiska ”pulsandet” från ett fartygs roterande axel kan upptäckas långt bortom vad äldre tekniker tillåter, även i stökiga, verkliga vattenmiljöer. Genom att smart kombinera två sensorer, avancerad filtrering och en kaosbaserad detektor avslöjar metoden ett regelbundet mönster där vanlig analys mest ser slumpmässighet. Sådan ultrasensorisk, icke-akustisk detektion skulle kunna komplettera sonar och hjälpa till att spåra ytfartyg och undervattensfarkoster samtidigt som man förblir passiv och svår att upptäcka i gengäld.
Citering: Qiu, H., Yang, P., Huang, C. et al. Dual-sensor coherence-driven adaptive denoising (WF-VMD-DDCDO) for underwater target detection. Sci Rep 16, 14067 (2026). https://doi.org/10.1038/s41598-026-41814-7
Nyckelord: detektion av undervattensmål, magnetisk avkänning, signalavbrusning, marin elektromagnetik, kaotiska oscillatorer