Clear Sky Science · es
Desenmascaramiento adaptativo impulsado por coherencia de sensores duales (WF-VMD-DDCDO) para la detección de blancos submarinos
Escuchar barcos sin sonido
Los buques y submarinos dejan huellas magnéticas tenues en el agua cuando sus partes metálicas interactúan con el agua de mar y con los sistemas eléctricos de protección. Estas señales de muy baja frecuencia pueden propagarse a kilómetros, ofreciendo una vía para detectar vehículos submarinos sin recurrir al sonido. Pero en el océano real, estas trazas magnéticas están enterradas bajo ruido de fondo intenso y otras señales de origen humano. Este artículo presenta un nuevo método en varios pasos que puede extraer el “latido” magnético de un barco incluso cuando está muy por debajo del nivel de ruido, haciendo la detección silenciosa y a larga distancia más práctica.
Un faro oculto en los ejes giratorios
Cuando una embarcación se desplaza, el eje de su hélice rota a una velocidad constante. Este movimiento altera sutilmente el contacto eléctrico entre distintos metales del buque, modulando tanto las corrientes de corrosión como las corrientes de protección que fluyen por el agua de mar. El resultado es un campo electromagnético de muy baja frecuencia cuyo tono principal coincide con la velocidad de rotación del eje y cuya energía puede viajar grandes distancias con poca atenuación. En principio, este campo a la velocidad del eje es un faro ideal para rastreo. En la práctica, queda enmascarado por un ruido «coloreado» complejo del entorno magnético terrestre y por líneas de interferencia fuertes procedentes de redes eléctricas y otros equipos, especialmente en aguas someras donde los métodos acústicos tradicionales ya encuentran dificultades.
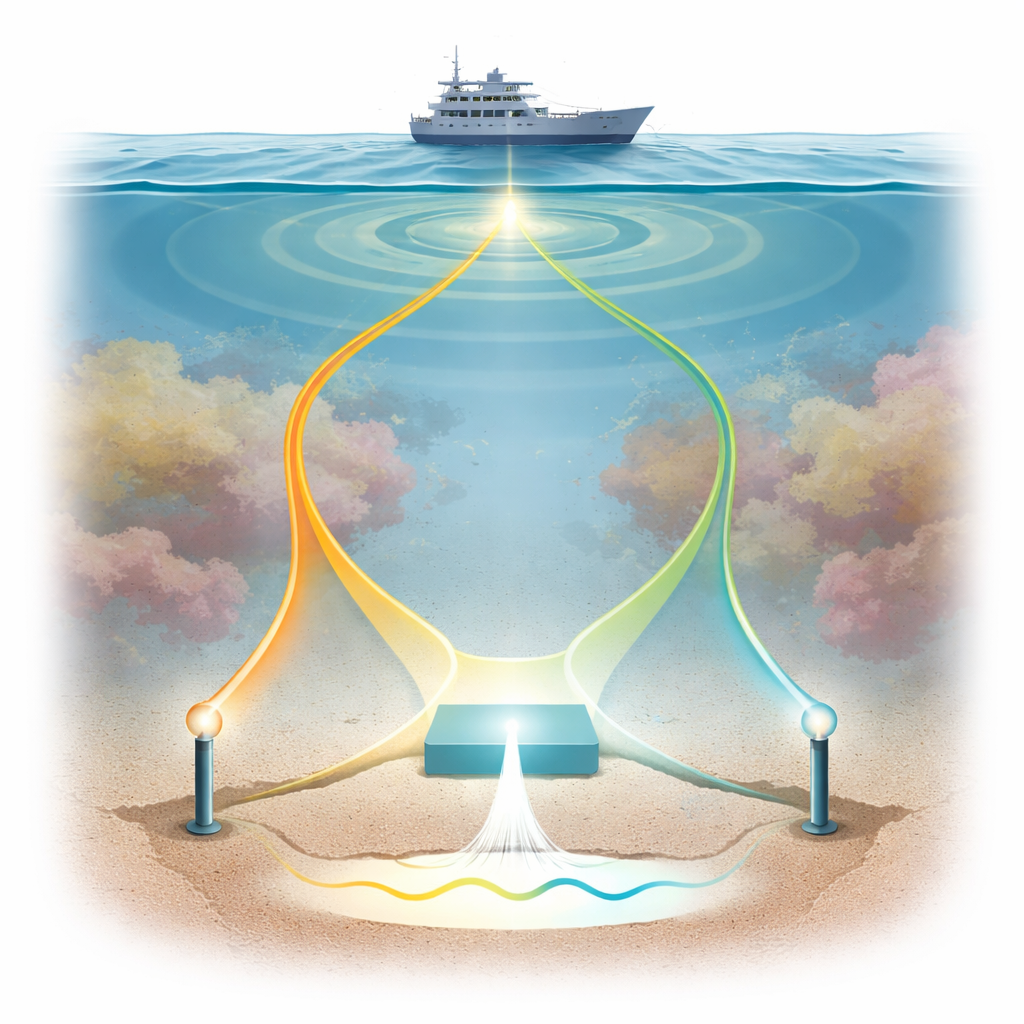
Usar dos oídos en lugar de uno
La primera idea de los autores es tratar el campo a la velocidad del eje como una señal coherente, o compartida, que alcanza a dos sensores de manera relacionada, mientras que la mayor parte del ruido de fondo se comporta de forma diferente en cada ubicación. Colocan un par de magnetómetros idénticos separados cierta distancia en el lecho marino. Al comparar las dos corrientes de datos en el dominio de la frecuencia, estiman cómo el verdadero campo objetivo se transforma entre los sensores y usan esta «función de transferencia» para reforzar lo que ambos conjuntos de datos comparten y cancelar lo que no coincide. Este paso de realce coherente reduce de forma notable las líneas de interferencia y grandes porciones del ruido magnético ambiental antes de cualquier procesamiento adicional.
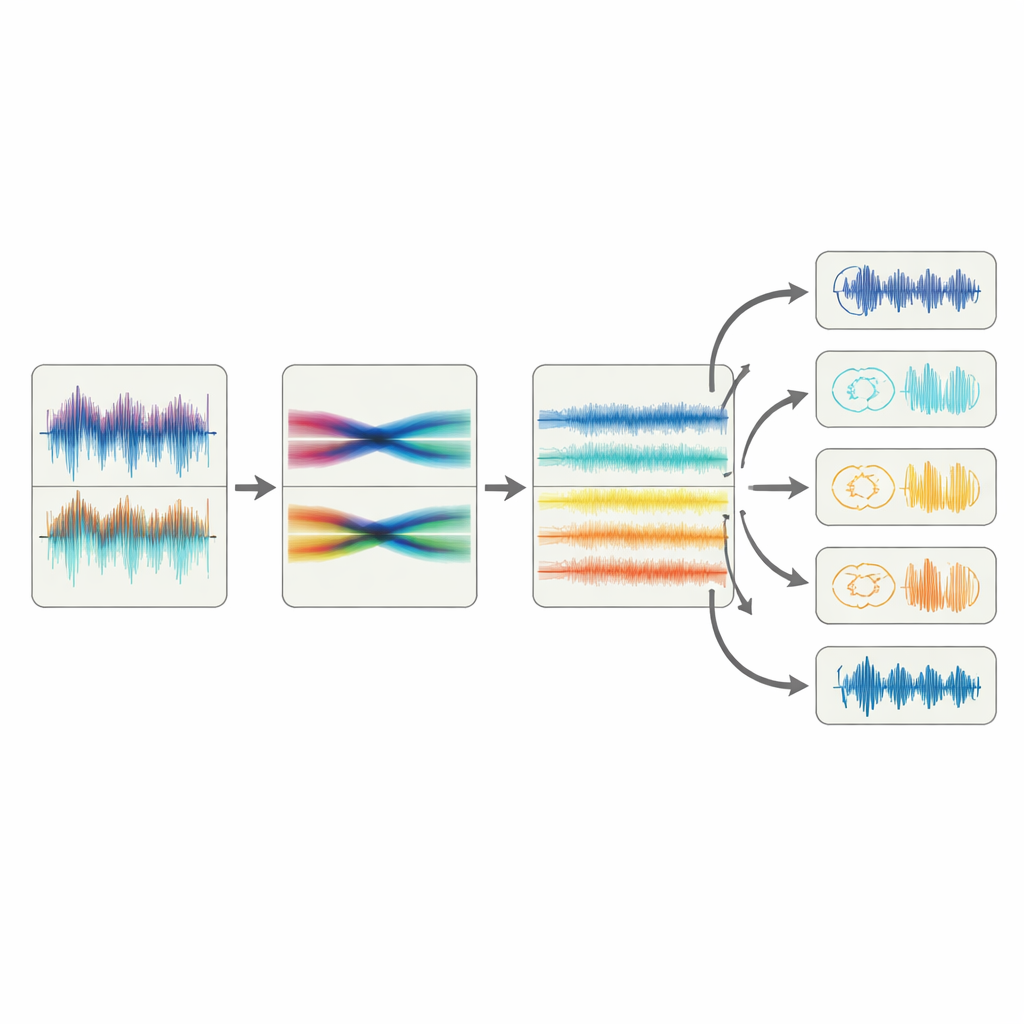
Domar el ruido coloreado y descomponer la señal
Incluso tras el procesamiento por coherencia, el ruido residual se comporta de manera muy distinta al ruido aleatorio ideal que asumen muchos algoritmos. Para igualar esto, el equipo aplica un filtro whitening que moldea el espectro para que la energía del ruido sea más uniforme a lo largo de las frecuencias, sin desplazar la frecuencia real de la velocidad del eje. A continuación aplican la descomposición modal variacional, un método con base matemática para dividir la señal limpiada en varias bandas más simples, cada una cubriendo una rebanada distinta del espectro. En estas modalidades intrínsecas, el campo oculto a la velocidad del eje puede destacar con más claridad frente al ruido residual que en la señal mixta original.
Dejar que el caos señale el objetivo
La etapa final de detección utiliza un sistema caótico diseñado especialmente, llamado oscilador Duffing diferencial doblemente acoplado. Este oscilador no lineal es excepcionalmente sensible a entradas periódicas diminutas: cuando su frecuencia interna de excitación barre la desconocida velocidad del eje, el sistema pasa brevemente a un estado intermitente distintivo dos veces de forma sucesiva. Al escanear cada banda de señal descompuesta y observar estas transiciones emparejadas, el método puede confirmar la presencia del campo a la velocidad del eje y estimar su frecuencia. Los autores automatizan además esta fase usando una medida llamada entropía de muestra para elegir la fuerza de excitación adecuada, asegurando que el oscilador responda de forma fiable sin dejarse engañar por el ruido.
Demostración en laboratorio y en campo
Los investigadores prueban toda la cadena —realce coherente, whitening, descomposición y detección caótica— con señales sintéticas y con mediciones reales tomadas junto a un lago usando una bobina que emula el campo de velocidad del eje de un buque. Comparan el rendimiento frente a eliminación de ruido por wavelets, realce adaptativo de líneas, modelos de aprendizaje profundo y enfoques anteriores basados en Duffing. Mientras muchos de estos métodos fallan cuando la señal está 20 a 40 decibelios por debajo del ruido, el nuevo enfoque sigue identificando correctamente la frecuencia de la velocidad del eje en la mayoría de los casos y mantiene bajas las falsas alarmas. En un escenario de campo con una señal enterrada más de 50 decibelios bajo el ruido, el método alcanza más del 95 por ciento de precisión en la detección.
Qué significa esto para el sensado oceánico silencioso
En términos sencillos, este trabajo demuestra que el «pulso» magnético del eje giratorio de un buque puede detectarse mucho más allá de lo que permiten técnicas anteriores, incluso en aguas reales y desordenadas. Al combinar de forma ingeniosa dos sensores, filtrado avanzado y un detector basado en el caos, el método descubre un patrón regular donde el análisis ordinario percibe sobre todo aleatoriedad. Esta detección ultrasensible y no acústica podría complementar al sonar, ayudando a rastrear buques de superficie y vehículos submarinos mientras se mantiene pasiva y difícil de detectar en retorno.
Cita: Qiu, H., Yang, P., Huang, C. et al. Dual-sensor coherence-driven adaptive denoising (WF-VMD-DDCDO) for underwater target detection. Sci Rep 16, 14067 (2026). https://doi.org/10.1038/s41598-026-41814-7
Palabras clave: detección de blancos submarinos, sensado magnético, eliminación de ruido de señales, electromagnetismo marino, osciladores caóticos