Clear Sky Science · nl
Coherentiegestuurde adaptieve dubbele-sensor ruisonderdrukking (WF-VMD-DDCDO) voor detectie van onderwatertargets
Luisteren naar schepen zonder geluid
Schepen en onderzeeërs laten zwakke magnetische vingerafdrukken achter in het water wanneer hun metalen onderdelen reageren met zeewater en beschermende elektrische systemen. Deze extreem laagfrequente signalen kunnen kilometers ver reizen, en bieden een manier om onderwatervoertuigen te detecteren zonder geluid te gebruiken. In de echte oceaan liggen deze magnetische sporen echter begraven onder zware achtergrondruis en andere door de mens veroorzaakte signalen. Dit artikel introduceert een nieuwe meerstapsmethode die het magnetische “hartslag”-patroon van een schip kan blootleggen, zelfs wanneer het ver onder het ruisniveau zit, waardoor detectie op lange afstand en stil werken praktischer wordt.
Een verborgen baken van draaiende assen
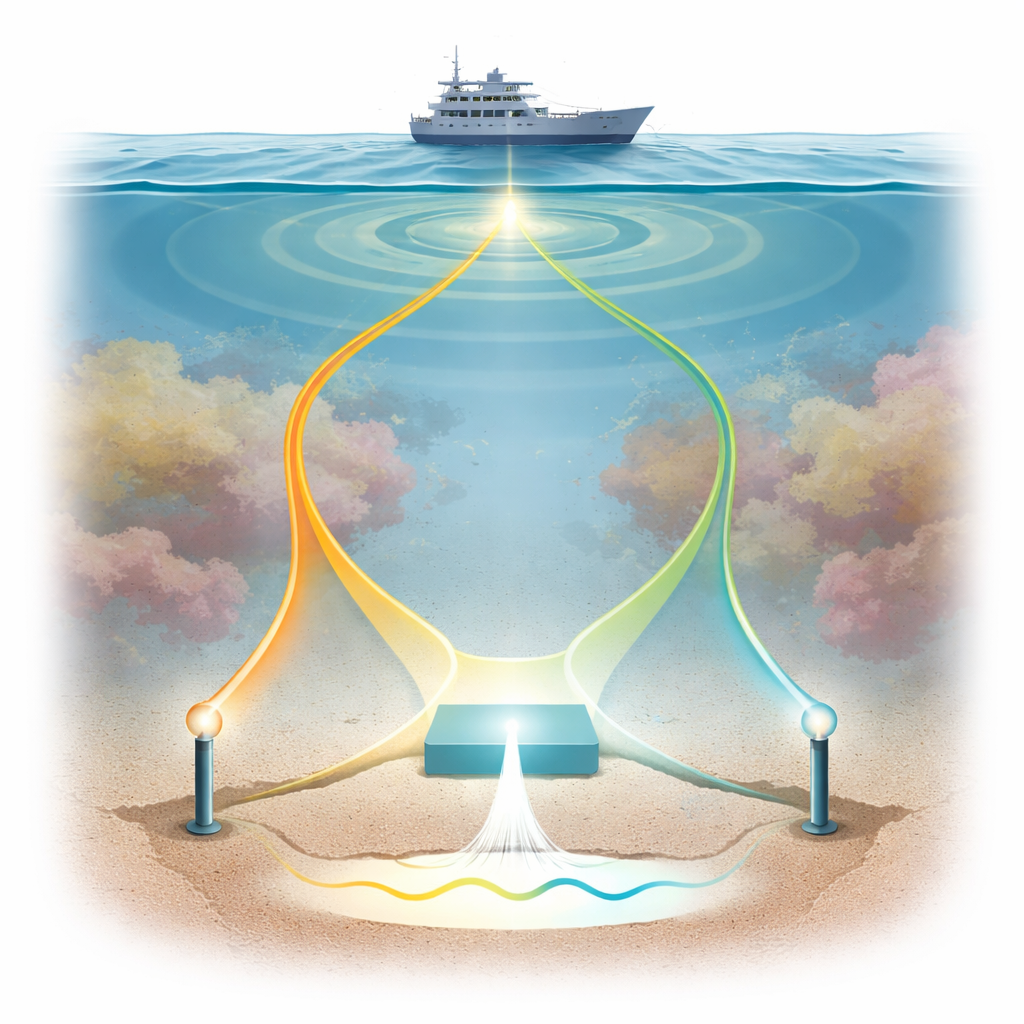
Wanneer een vaartuig beweegt, draait de schroefas met een constante snelheid. Deze beweging verandert subtiel het elektrische contact tussen verschillende metalen op het schip, waardoor zowel corrosiestromen als beschermingsstromen door het zeewater worden gemoduleerd. Het resultaat is een zeer laagfrequent elektromagnetisch veld waarvan de hoofdtoon overeenkomt met de draaisnelheid van de as en waarvan de energie over lange afstanden met weinig verlies kan reizen. In principe is dit as‑frequentieveld een ideaal volg-baken. In de praktijk wordt het echter gemaskeerd door complexe “gekleurde” ruis uit het magnetische milieu van de aarde en door sterke interferentielijnen van stroomvoorzieningen en andere apparatuur, vooral in ondiep water waar traditionele akoestische methoden al moeite hebben.
Twee oren in plaats van één gebruiken
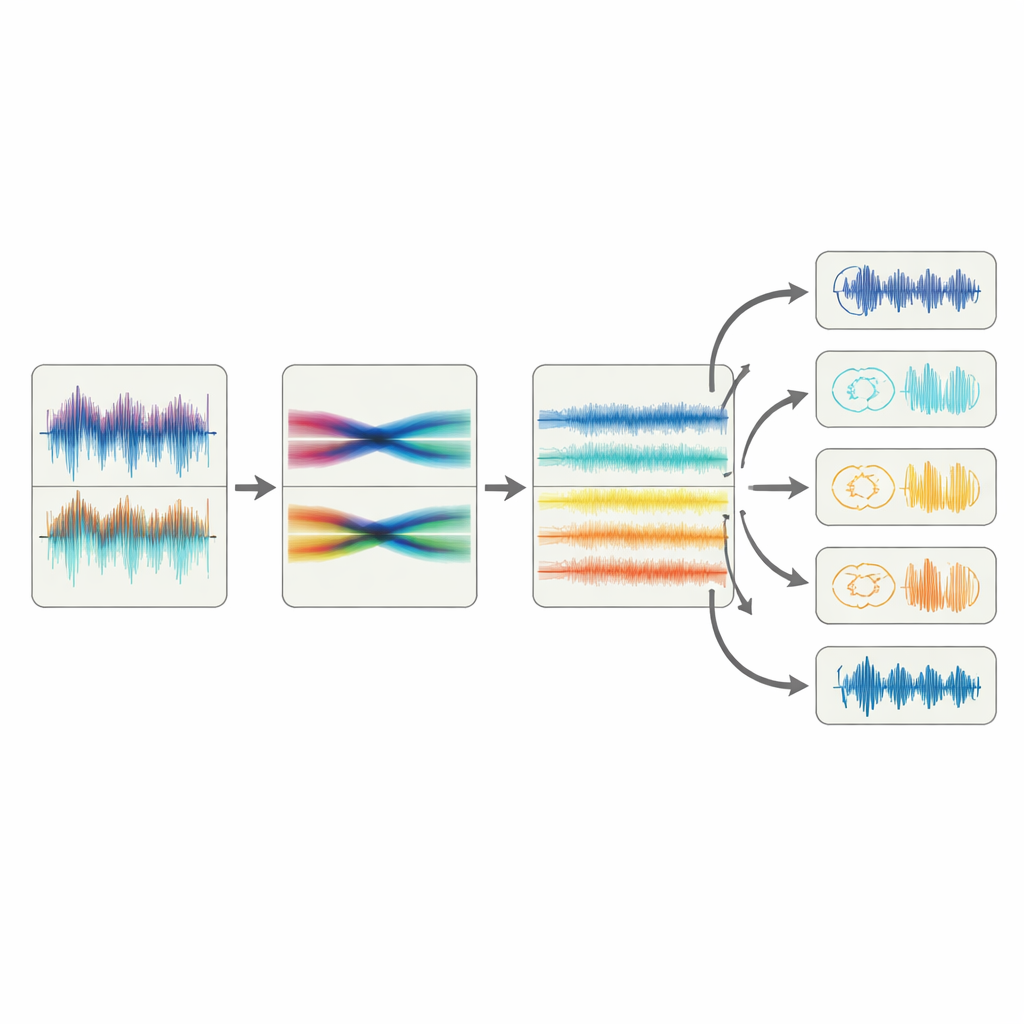
Het eerste idee van de auteurs is het as‑frequentieveld van het schip te behandelen als een coherent, of gedeeld, signaal dat op twee sensoren op een gerelateerde manier aankomt, terwijl de meeste achtergrondruis op beide locaties vergelijkbaar is. Ze plaatsen een paar identieke magnetometers op enige afstand van elkaar op de zeebodem. Door de twee datastromen in het frequentiedomein te vergelijken, schatten ze hoe het werkelijke doelsignaal tussen de sensoren transformeert en gebruiken ze deze “overdrachtsfunctie” om te versterken wat de datasets gemeen hebben en te annuleren wat niet overeenkomt. Deze coherente signaalversterkingsstap vermindert sterk interferentielijnen en grote delen van de omgevingsmagnetische ruis vóór verdere verwerking.
Gekleurde ruis temmen en het signaal splitsen
Zelfs na coherentieprocessing gedraagt de resterende achtergrond zich heel anders dan de ideale willekeurige ruis die in veel algoritmen wordt verondersteld. Om dat gelijkmatiger te maken, past het team een whitening‑filter toe dat het spectrum herschikt zodat de ruisenergie over frequenties meer uniform wordt, zonder de werkelijke as‑frequentie te verschuiven. Vervolgens volgt variational mode decomposition, een wiskundig onderbouwde methode om het schoongemaakte signaal op te splitsen in meerdere eenvoudigere banden, die elk een ander deel van het spectrum beslaan. In deze intrinsieke modi kan het verborgen as‑frequentieveld duidelijker naar voren komen dan in het oorspronkelijke gemengde signaal.
De chaos het doel laten aanwijzen
De laatste detectiestap gebruikt een speciaal ontworpen chaotisch systeem, de differentiële dubbelgekoppelde Duffing‑oscillator. Deze nietlineaire oscillator is uitzonderlijk gevoelig voor kleine periodieke invoer: wanneer zijn interne aandrijffrequentie over de onbekende as‑frequentie schuift, schakelt het systeem kortstondig in een kenmerkende intermitterende toestand, twee keer op rij. Door elke gedecomponeerde signaalband te scannen en te letten op deze paargewijze overgangen, kan de methode de aanwezigheid van de as‑frequentie bevestigen en de frequentie schatten. De auteurs automatiseren deze stap verder door een maat genaamd sample entropy te gebruiken om precies de juiste aandrijfsterkte te kiezen, zodat de oscillator betrouwbaar reageert zonder door ruis te worden misleid.
Aangetoond in laboratorium en veld
De onderzoekers testen hun volledige keten — coherente versterking, whitening, decompositie en chaotische detectie — op synthetische signalen en op echte metingen die naast een meer zijn gedaan met een spoel die het as‑frequentieveld van een schip nabootst. Ze vergelijken de prestaties met wavelet‑ruisonderdrukking, adaptieve lijnversterking, deep‑learningmodellen en eerdere Duffing‑gebaseerde benaderingen. Terwijl veel van deze methoden falen zodra het signaal 20 tot 40 decibel onder de ruis ligt, identificeert de nieuwe aanpak in de meeste gevallen nog steeds correct de as‑frequentie en houdt hij het aantal valse alarmen laag. In één veldscenario met een signaal dat meer dan 50 decibel onder de ruis lag, behaalt de methode meer dan 95 procent detectie‑nauwkeurigheid.
Wat dit betekent voor stille oceaansensoriek
Kort gezegd toont dit werk aan dat de magnetische “puls” van een draaiende as van een schip veel verder gedetecteerd kan worden dan oudere technieken toelaten, zelfs in rommelige, realistische wateren. Door op slimme wijze twee sensoren, geavanceerde filtering en een chaos‑gebaseerde detector te combineren, onthult de methode een regelmaat waar gewone analyse vooral willekeur ziet. Zulke ultrasensitieve, niet‑akoestische detectie kan sonar aanvullen en helpen bij het volgen van oppervlakteschepen en onderwatervoertuigen, terwijl het passief blijft en moeilijk terug te detecteren is.
Bronvermelding: Qiu, H., Yang, P., Huang, C. et al. Dual-sensor coherence-driven adaptive denoising (WF-VMD-DDCDO) for underwater target detection. Sci Rep 16, 14067 (2026). https://doi.org/10.1038/s41598-026-41814-7
Trefwoorden: detectie van onderwatertargets, magnetische sensoriek, signaalruisonderdrukking, mariene elektromagnetica, chaotische oscillatoren