Clear Sky Science · pl
Dwuzmysłowe koherencyjno‑napędzane adaptacyjne odszumianie (WF‑VMD‑DDCDO) do wykrywania celów podwodnych
Słuchając statków bez dźwięku
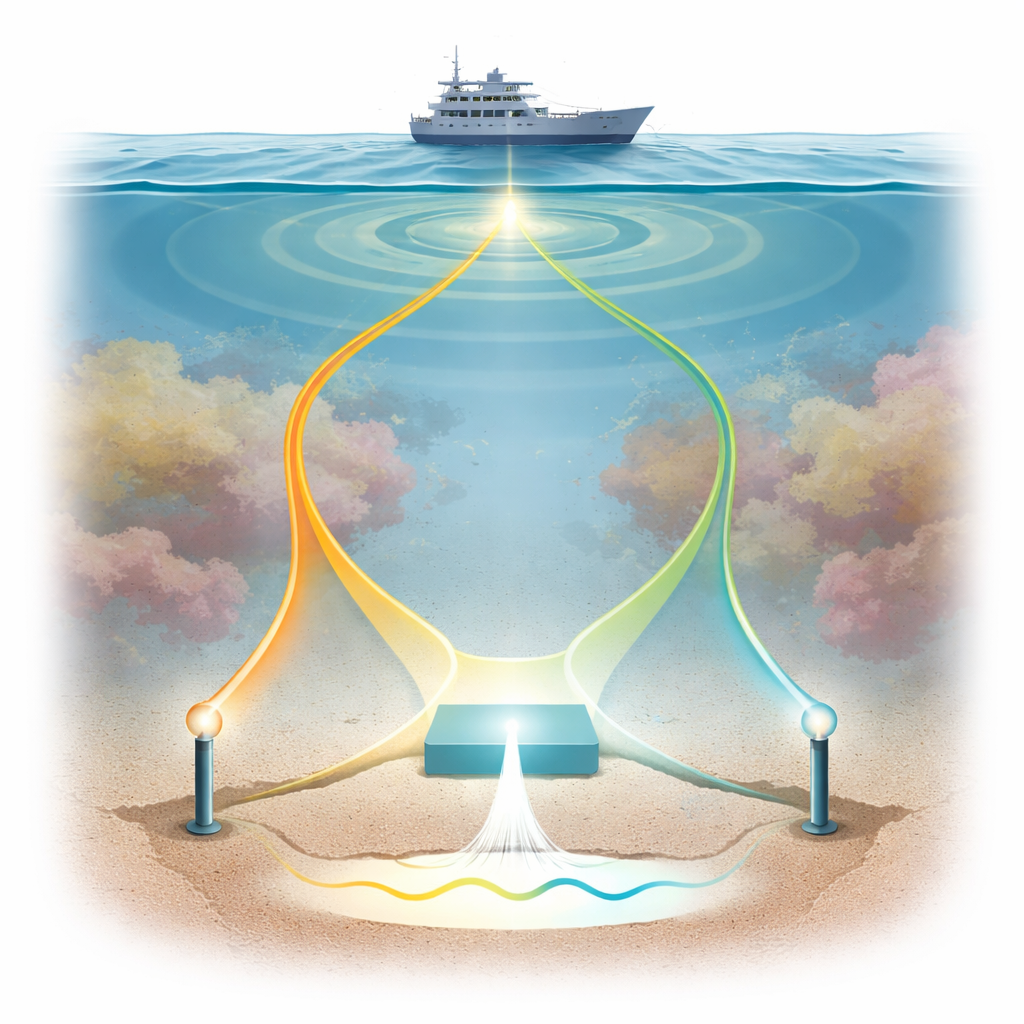
Statki i okręty podwodne pozostawiają słabe magnetyczne odciski w wodzie, gdy ich metalowe elementy wchodzą w interakcję z wodą morską i systemami ochronnymi. Te niezwykle niskoczęstotliwościowe sygnały mogą przemieszczać się na kilometry, oferując sposób wykrywania pojazdów podwodnych bez użycia dźwięku. Jednak w rzeczywistym oceanie te magnetyczne ślady są zakopane pod silnym tłem szumowym i innymi sygnałami generowanymi przez człowieka. W artykule przedstawiono nową wieloetapową metodę, która potrafi wydobyć „tętno” magnetyczne statku nawet wtedy, gdy leży ono daleko poniżej poziomu szumu, co sprawia, że długozasięgowe i dyskretne wykrywanie staje się bardziej praktyczne.
Ukryty sygnał od obracających się wałów
Gdy jednostka się porusza, wał śruby obraca się ze stałą prędkością. Ten ruch subtelnie zmienia kontakt elektryczny między różnymi metalami na statku, modulując zarówno prądy korozyjne, jak i prądy ochronne płynące przez wodę morską. Efektem jest bardzo niskoczęstotliwościowe pole elektromagnetyczne, którego podstawowy ton odpowiada prędkości obrotowej wału, a energia może rozchodzić się na duże odległości przy niewielkich stratach. W teorii pole o częstotliwości wału byłoby idealnym sygnałem do śledzenia. W praktyce jest ono zasłonięte przez złożony „kolorowy” szum środowiska magnetycznego Ziemi oraz przez silne linie interferencyjne pochodzące od systemów zasilania i innych urządzeń, szczególnie na płytkich wodach, gdzie tradycyjne metody akustyczne już mają problemy.
Użycie dwóch uszu zamiast jednego
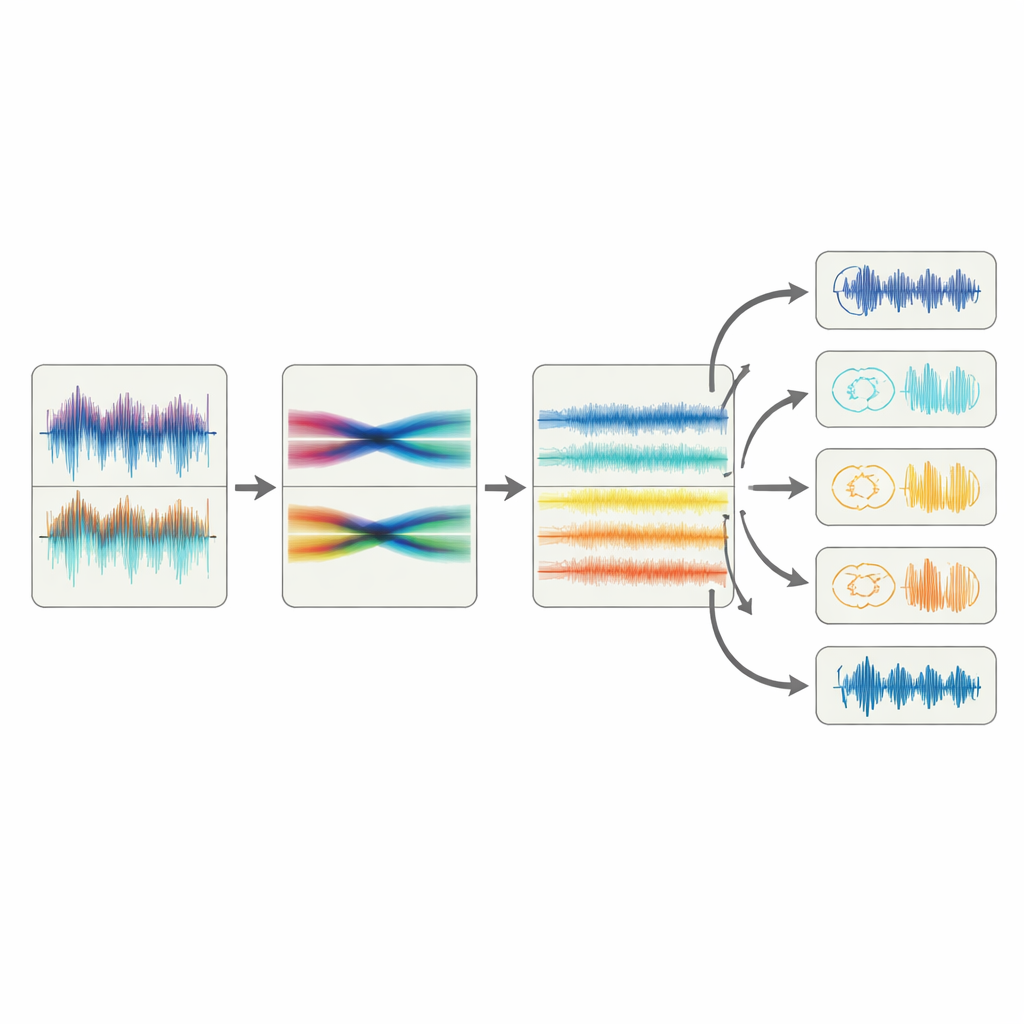
Pierwszy pomysł autorów polega na potraktowaniu pola o częstotliwości wału jako sygnału koherentnego, czyli wspólnego, który dociera do dwóch czujników w pokrewny sposób, podczas gdy większość szumu tła wygląda podobnie w obu miejscach. Para identycznych magnetometrów jest umieszczona w pewnej odległości na dnie morskim. Poprzez porównanie dwóch strumieni danych w dziedzinie częstotliwości szacują, jak rzeczywiste pole celu przekształca się między czujnikami i używają tej „funkcji przenoszenia”, by wzmocnić to, co jest wspólne dla obu zestawów danych, oraz anulować to, co się nie zgadza. Ten etap wzmacniania sygnału koherentnego silnie redukuje linie interferencyjne i dużą część otaczającego szumu magnetycznego przed dalszym przetwarzaniem.
Oswojenie kolorowego szumu i rozdzielenie sygnału
Nawet po przetwarzaniu koherencyjnym pozostałe tło zachowuje się zupełnie inaczej niż idealny szum losowy zakładany w wielu algorytmach. Aby to wyrównać, zespół stosuje filtr wybielający, który przekształca widmo tak, by energia szumu była bardziej jednorodna w całym paśmie częstotliwości, nie przesuwając przy tym rzeczywistej częstotliwości wału. Następnie stosują wariacyjną dekompozycję modów — matematycznie ugruntowany sposób rozbicia oczyszczonego sygnału na kilka prostszych pasm, z których każde obejmuje inny fragment widma. W tych wewnętrznych modach ukryte pole o częstotliwości wału może wyróżniać się wyraźniej na tle pozostałego szumu niż w pierwotnym, zmieszanym sygnale.
Wykorzystanie chaosu do wskazania celu
Końcowy etap wykrywania wykorzystuje specjalnie zaprojektowany układ chaotyczny zwany różnicowo podwójnie sprzężonym oscylatorem Duffinga. Ten nieliniowy oscylator jest wyjątkowo czuły na drobne periodyczne pobudzenia: gdy jego wewnętrzna częstotliwość napędowa przegięła się przez nieznaną częstotliwość wału, układ krótkotrwale przechodzi w charakterystyczny stan przerywany dwukrotnie z rzędu. Przeszukując każde z rozłożonych pasm sygnału i obserwując te parowane przejścia, metoda może potwierdzić obecność pola o częstotliwości wału i oszacować jego częstotliwość. Autorzy dodatkowo automatyzują ten etap, używając miary zwanej entropią próbkowania, aby dobrać odpowiednią siłę pobudzenia, zapewniając, że oscylator reaguje wiarygodnie, nie dając się zwieść przez szum.
Dowód skuteczności w laboratorium i w terenie
Naukowcy testują cały łańcuch — wzmocnienie koherentne, wybielanie, dekompozycję i detekcję chaotyczną — na sygnałach syntetycznych oraz na rzeczywistych pomiarach wykonanych przy brzegu jeziora przy użyciu cewki imitującej pole o częstotliwości wału statku. Porównują wydajność z denoisingiem falek, adaptacyjnym wzmacnianiem linii, modelami głębokiego uczenia i wcześniejszymi podejściami opartymi na Duffingu. Podczas gdy wiele z tych metod zawodzi, gdy sygnał znajduje się 20–40 decybeli poniżej szumu, nowe podejście w większości przypadków nadal poprawnie identyfikuje częstotliwość wału i utrzymuje niski poziom fałszywych alarmów. W jednym scenariuszu terenowym, przy sygnale pogrzebanym ponad 50 decybeli pod poziomem szumu, metoda osiągnęła ponad 95 procent skuteczności wykrywania.
Co to oznacza dla cichego monitoringu oceanów
Mówiąc prościej, praca ta pokazuje, że magnetyczne „uderzenie” obracającego się wału statku można wykryć znacznie dalej, niż pozwalają starsze techniki, nawet w złożonych, rzeczywistych warunkach morskich. Dzięki sprytnemu połączeniu dwóch czujników, zaawansowanemu filtrowaniu i detektora opartego na chaosie, metoda odkrywa regularny wzorzec tam, gdzie zwykła analiza widzi przede wszystkim przypadkowość. Takie ultrasensytywne, nieakustyczne wykrywanie może uzupełniać sonary, pomagając śledzić statki nawodne i pojazdy podwodne, pozostając jednocześnie pasywne i trudne do wykrycia przez przeciwnika.
Cytowanie: Qiu, H., Yang, P., Huang, C. et al. Dual-sensor coherence-driven adaptive denoising (WF-VMD-DDCDO) for underwater target detection. Sci Rep 16, 14067 (2026). https://doi.org/10.1038/s41598-026-41814-7
Słowa kluczowe: wykrywanie celów podwodnych, detekcja magnetyczna, odszumianie sygnałów, elektromagnetyka morska, oscylatory chaotyczne