Clear Sky Science · en
Dual-sensor coherence-driven adaptive denoising (WF-VMD-DDCDO) for underwater target detection
Listening for Ships Without Sound
Ships and submarines leave faint magnetic fingerprints in the water as their metal parts interact with seawater and protective electrical systems. These extremely low-frequency signals can travel for kilometers, offering a way to spot underwater vehicles without using sound. But in the real ocean, these magnetic traces are buried under heavy background noise and other man‑made signals. This paper introduces a new multi‑step method that can pull out a ship’s magnetic “heartbeat” even when it is far below the noise level, making long‑range, quiet detection more practical.
A Hidden Beacon from Turning Shafts
When a vessel moves, its propeller shaft rotates at a steady rate. This motion subtly changes the electrical contact between different metals on the ship, modulating both corrosion currents and protective currents flowing through seawater. The result is a very low‑frequency electromagnetic field whose main tone matches the shaft’s rotation rate and whose energy can travel long distances with little loss. In principle, this shaft‑rate field is an ideal tracking beacon. In practice, it is masked by complex “colored” noise from Earth’s magnetic environment and by strong interference lines from power systems and other equipment, especially in shallow water where traditional acoustic methods already struggle.
Using Two Ears Instead of One
The authors’ first idea is to treat the ship’s shaft‑rate field as a coherent, or shared, signal that reaches two sensors in a related way, while most background noise looks similar at both locations. They place a pair of identical magnetometers some distance apart on the seafloor. By comparing the two data streams in the frequency domain, they estimate how the true target field transforms between the sensors and use this “transfer function” to reinforce what the two data sets have in common and cancel what does not match. This coherent signal enhancement step strongly reduces interference lines and large portions of the ambient magnetic noise before any further processing.
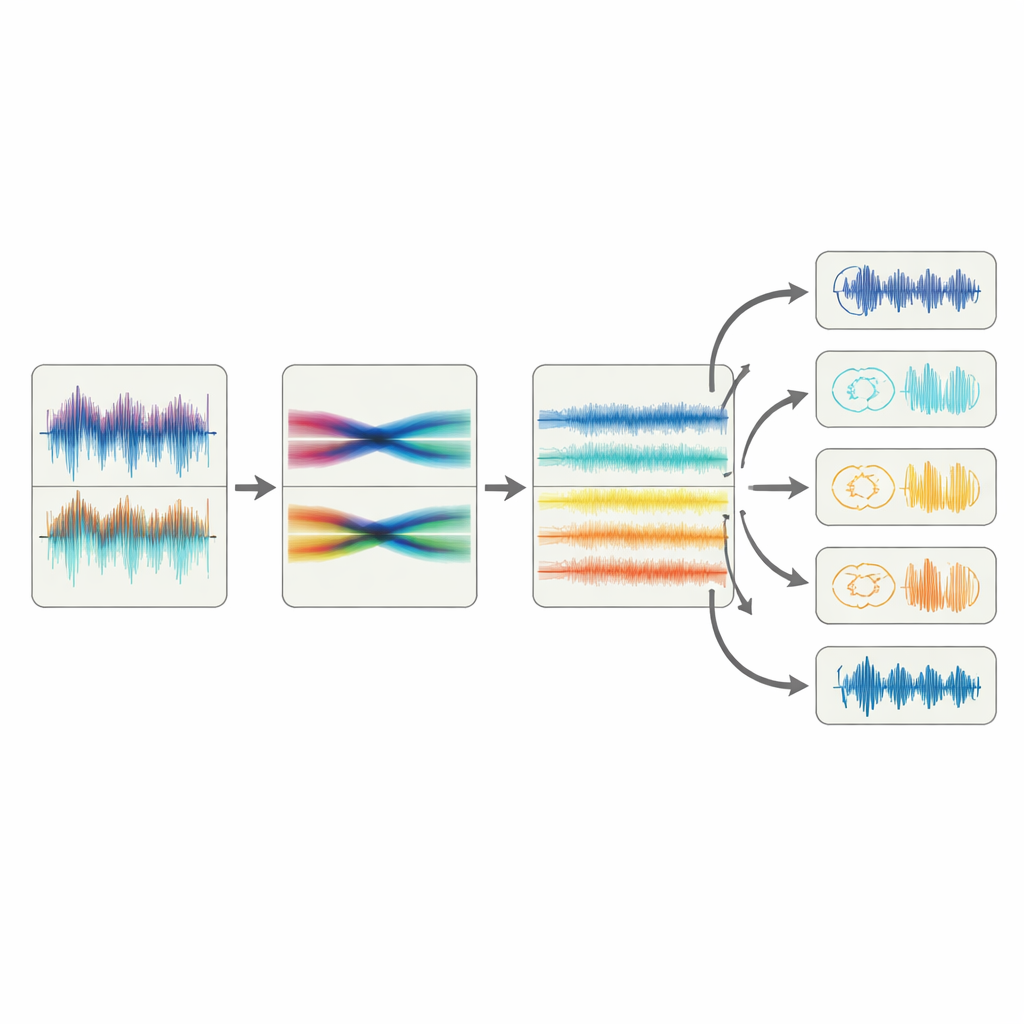
Taming Colored Noise and Splitting the Signal
Even after coherence processing, the remaining background behaves very differently from the ideal random noise assumed in many algorithms. To even things out, the team applies a whitening filter that reshapes the spectrum so that noise energy is more uniform across frequencies, without shifting the true shaft‑rate frequency. Next comes variational mode decomposition, a mathematically grounded way to break the cleaned‑up signal into several simpler bands, each covering a different slice of the spectrum. In these intrinsic modes, the hidden shaft‑rate field can stand out more clearly from the residual noise than in the original mixed signal.
Letting Chaos Point to the Target
The final detection stage uses a specially designed chaotic system called a differential double‑coupled Duffing oscillator. This nonlinear oscillator is unusually sensitive to tiny periodic inputs: when its internal driving frequency sweeps across the unknown shaft‑rate, the system briefly flips into a distinctive intermittent state twice in succession. By scanning each decomposed signal band and watching for these paired transitions, the method can confirm the presence of the shaft‑rate field and estimate its frequency. The authors further automate this stage by using a measure called sample entropy to choose just the right driving strength, ensuring the oscillator responds reliably without being fooled by noise.
Proving It Works in the Lab and in the Field
The researchers test their full chain—coherent enhancement, whitening, decomposition, and chaotic detection—on synthetic signals and on real measurements taken beside a lake using a coil that mimics a ship’s shaft‑rate field. They compare performance against wavelet denoising, adaptive line enhancement, deep‑learning models, and earlier Duffing‑based approaches. While many of these methods fail once the signal is 20 to 40 decibels below the noise, the new approach still identifies the shaft‑rate frequency correctly in most cases and keeps false alarms low. In one field scenario with a signal buried more than 50 decibels under noise, the method achieves over 95 percent detection accuracy.
What This Means for Quiet Ocean Sensing
In simple terms, this work shows that the magnetic “pulse” of a ship’s turning shaft can be detected far beyond what older techniques allow, even in messy, real‑world waters. By cleverly combining two sensors, advanced filtering, and a chaos‑based detector, the method uncovers a regular pattern where ordinary analysis mostly sees randomness. Such ultra‑sensitive, non‑acoustic detection could complement sonar, helping track surface ships and underwater vehicles while staying passive and hard to detect in return.
Citation: Qiu, H., Yang, P., Huang, C. et al. Dual-sensor coherence-driven adaptive denoising (WF-VMD-DDCDO) for underwater target detection. Sci Rep 16, 14067 (2026). https://doi.org/10.1038/s41598-026-41814-7
Keywords: underwater target detection, magnetic sensing, signal denoising, marine electromagnetics, chaotic oscillators