Clear Sky Science · ru
Адаптивное денойзирование, управляемое когерентностью двух датчиков (WF-VMD-DDCDO), для обнаружения подводных целей
Слушая корабли без звука
Корабли и подводные лодки оставляют в воде слабые магнитные отпечатки: при взаимодействии металлических частей с морской водой и защитными электрическими системами возникают очень низкочастотные сигналы. Эти сигналы могут распространяться на километры, предоставляя способ обнаруживать подводные аппараты без использования акустики. Но в реальном океане магнитные следы зарыты в мощном фоновом шуме и других антропогенных помехах. В статье представлен новый многоступенчатый метод, который способен выделить «сердцебиение» корабля даже когда оно значительно ниже уровня шума, делая дальнее бесшумное обнаружение более практичным.
Скрытый маяк от вращающихся валов
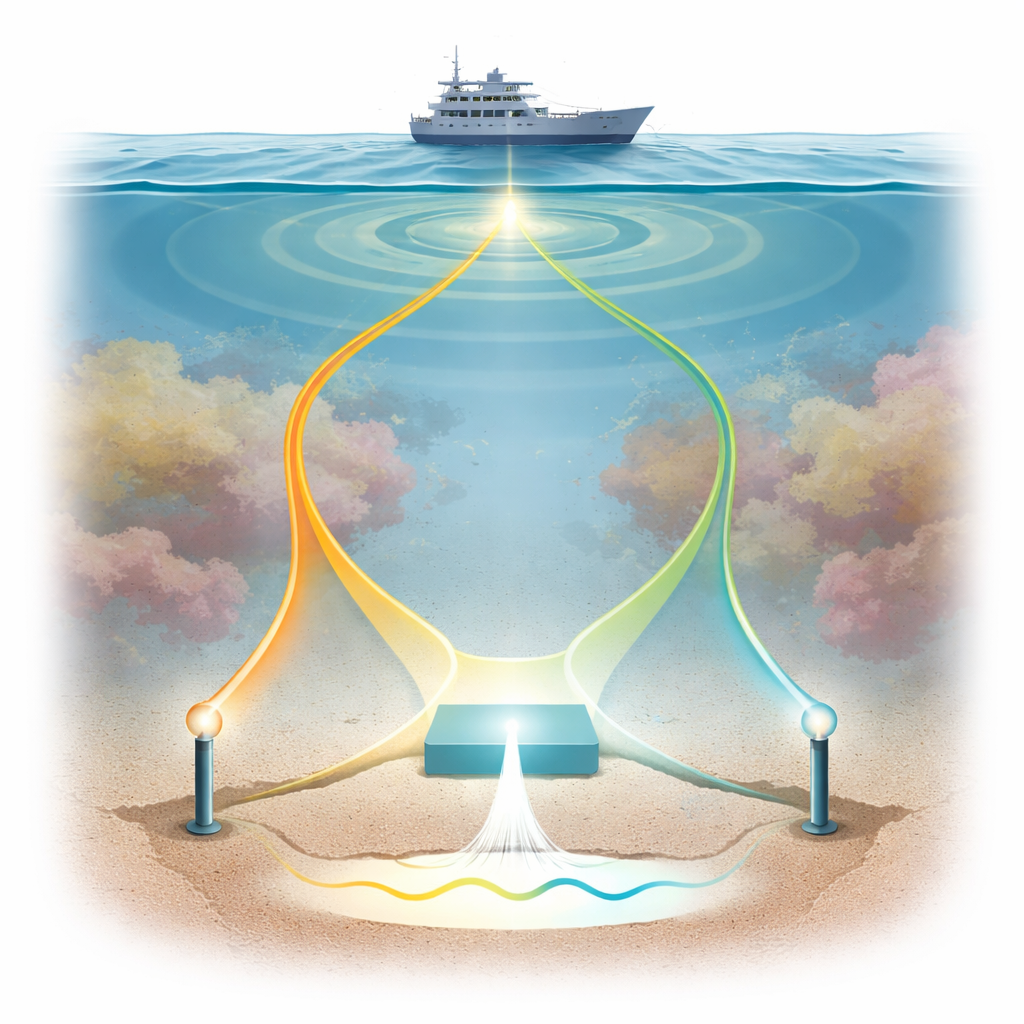
Когда судно движется, вал гребного винта вращается с постоянной скоростью. Это движение тонко изменяет электрический контакт между разными металлами на корабле, модулируя как коррозионные токи, так и защитные токи, протекающие через морскую воду. В результате возникает очень низкочастотное электромагнитное поле, основной тон которого соответствует частоте вращения вала, и энергия которого может распространяться на большие расстояния с малыми потерями. В принципе, это поле, синхронное с частотой вала, является идеальным маяком для отслеживания. На практике оно замаскировано сложным «цветным» шумом земного магнитного фона и сильными линиями помех от энергосетей и оборудования, особенно в мелких водах, где традиционные акустические методы уже испытывают трудности.
Использовать два уха вместо одного
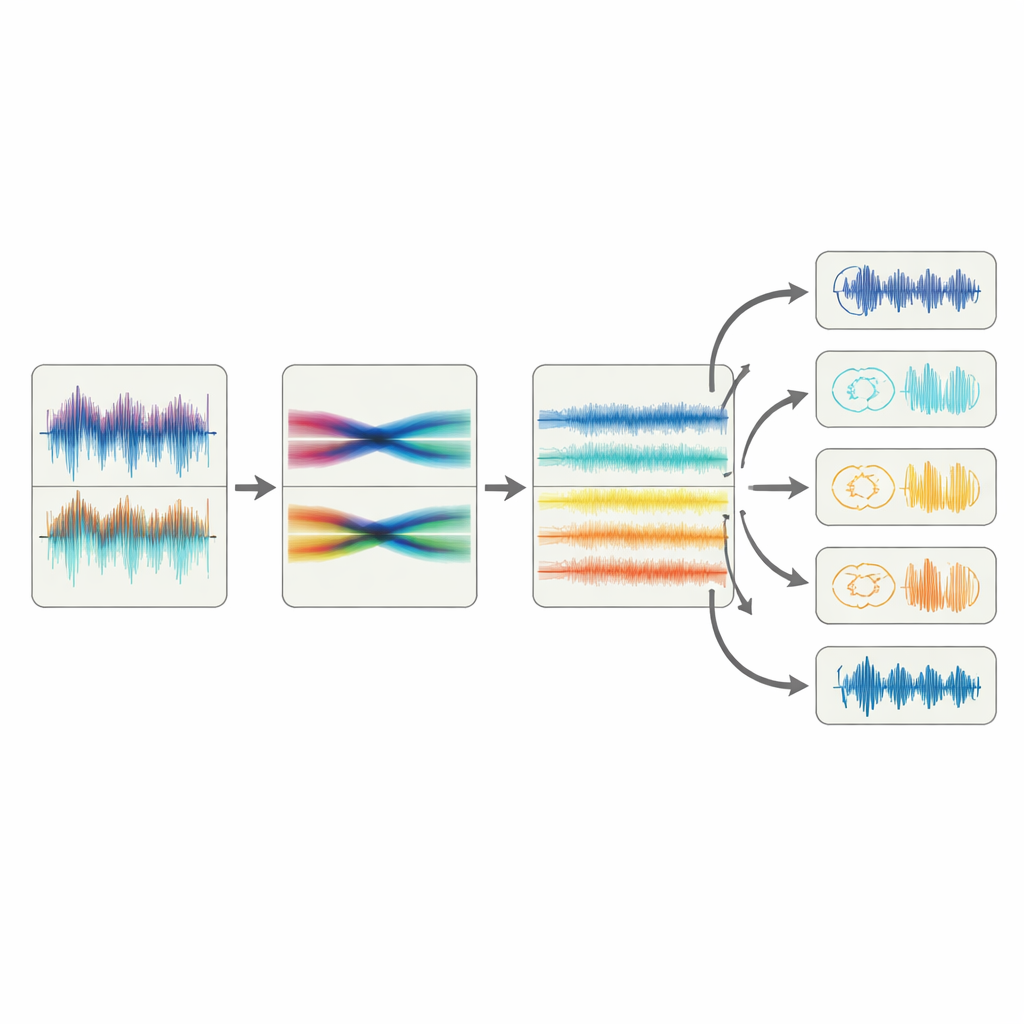
Первая идея авторов — рассматривать поле, связанное с частотой вала, как когерентный, то есть общий сигнал, который доходит до двух сенсоров с определённой связью, тогда как большая часть фонового шума имеет иные свойства в разных точках. Они размещают пару идентичных магнетометров на некотором расстоянии на морском дне. Сравнивая два потока данных в частотной области, исследователи оценивают, как истинное целевое поле преобразуется между сенсорами, и используют эту «передаточную функцию», чтобы усилить то, что общо для обоих наборов данных, и отменить то, что не совпадает. Этот шаг по усилению когерентного сигнала существенно уменьшает линии помех и значительную часть атмосферного магнитного шума перед дальнейшей обработкой.
Укрощение цветного шума и разложение сигнала
Даже после когерентной обработки оставшийся фон ведёт себя существенно иначе, чем идеализированный белый шум, предположенный во многих алгоритмах. Чтобы выровнять ситуацию, команда применяет вайтенинг-фильтр, который преобразует спектр так, чтобы энергия шума стала более однородной по частотам, не смещая при этом истинную частоту вращения вала. Затем применяется вариационное декомпозиция мод (VMD) — математически обоснованный способ разложить очищенный сигнал на несколько более простых полос, каждая из которых покрывает свой участок спектра. В этих собственных модах скрытое поле с частотой вала может проявиться яснее, чем в исходном смешанном сигнале.
Позволить хаосу указывать на цель
Финальная стадия обнаружения использует специально спроектированную хаотическую систему — дифференциально дважды связанный осциллятор Даффинга. Этот нелинейный осциллятор необычно чувствителен к крошечным периодическим воздействиям: когда частота его внутреннего возбуждения проходит через неизвестную частоту вала, система кратковременно переходит в характерное прерывистое состояние два раза подряд. Сканируя каждую разложенную полосу сигнала и отслеживая эти парные переходы, метод может подтвердить наличие поля, связанного с валом, и оценить его частоту. Авторы дополнительно автоматизируют этот этап, используя меру, называемую выборочной энтропией (sample entropy), чтобы выбрать оптимальную амплитуду возбуждения, обеспечивая надежную реакцию осциллятора без ложных срабатываний от шума.
Доказательства работоспособности в лаборатории и на поле
Исследователи испытывают полную цепочку — когерентное усиление, вайтенинг, декомпозицию и хаотическое обнаружение — на синтетических сигналах и на реальных измерениях, сделанных у берега озера с катушкой, имитирующей поле частоты вала судна. Их сравнивают с вейвлет‑денойзингом, адаптивным усилением линий, моделями глубокого обучения и ранними подходами на базе осциллятора Даффинга. В то время как многие из этих методов терпят неудачу при соотношении сигнал/шум в −20…−40 дБ, новый подход в большинстве случаев корректно определяет частоту вала и сохраняет низкий уровень ложных тревог. В одном полевом сценарии при сигнале, погребённом более чем на 50 дБ под шумом, метод достигает точности обнаружения выше 95 процентов.
Что это означает для бесшумного океанского зондирования
Проще говоря, работа показывает, что магнитный «импульс» от вращающегося вала судна можно обнаружить значительно дальше, чем позволяют старые методы, даже в запутанных условиях реального мира. За счёт умелого сочетания двух сенсоров, продвинутых фильтров и детектора на основе хаоса, метод обнаруживает регулярную структуру там, где обычный анализ видит в основном случайность. Такое сверхчувствительное неакустическое обнаружение может дополнить сонар, помогая отслеживать надводные корабли и подводные аппараты при пассивной и малозаметной работе в ответ.
Цитирование: Qiu, H., Yang, P., Huang, C. et al. Dual-sensor coherence-driven adaptive denoising (WF-VMD-DDCDO) for underwater target detection. Sci Rep 16, 14067 (2026). https://doi.org/10.1038/s41598-026-41814-7
Ключевые слова: обнаружение подводных целей, магнитное зондирование, подавление шума в сигналах, морская электромагнетика, хаотические осцилляторы