Clear Sky Science · pt
Denoising adaptativo dirigido por coerência com dois sensores (WF-VMD-DDCDO) para detecção de alvos subaquáticos
Escutando navios sem som
Navios e submarinos deixam impressões magnéticas sutis na água quando suas partes metálicas interagem com a água do mar e com sistemas elétricos de proteção. Esses sinais de frequência extremamente baixa podem se propagar por quilômetros, oferecendo uma forma de detectar veículos subaquáticos sem usar som. Mas no oceano real, esses vestígios magnéticos estão enterrados sob forte ruído de fundo e outros sinais artificiais. Este artigo apresenta um método novo, em várias etapas, que consegue extrair o “batimento” magnético de um navio mesmo quando ele está muito abaixo do nível de ruído, tornando a detecção silenciosa e de longo alcance mais prática.
Um farol oculto dos eixos giratórios
Quando uma embarcação se desloca, o eixo da hélice gira em velocidade quase constante. Esse movimento altera sutilmente o contato elétrico entre diferentes metais do navio, modulando tanto correntes de corrosão quanto correntes de proteção que fluem pela água do mar. O resultado é um campo eletromagnético de frequência muito baixa cujo tom principal coincide com a taxa de rotação do eixo e cuja energia pode viajar longas distâncias com pouca atenuação. Em princípio, esse campo na frequência do eixo é um sinal ideal de rastreamento. Na prática, ele fica mascarado por ruído “colorido” complexo do ambiente magnético da Terra e por linhas de interferência fortes vindas de sistemas de energia e de outros equipamentos, especialmente em águas rasas onde métodos acústicos tradicionais já encontram dificuldades.
Usando duas orelhas em vez de uma
A primeira ideia dos autores é tratar o campo na frequência do eixo do navio como um sinal coerente, ou compartilhado, que chega a dois sensores de forma relacionada, enquanto a maior parte do ruído de fundo se apresenta de modo semelhante em ambas as posições. Eles colocam um par de magnetômetros idênticos separados por certa distância no leito marinho. Ao comparar os dois fluxos de dados no domínio da frequência, estimam como o campo verdadeiro do alvo se transforma entre os sensores e usam essa “função de transferência” para reforçar o que os dois conjuntos de dados têm em comum e cancelar o que não corresponde. Essa etapa de realce da coerência reduz fortemente linhas de interferência e grandes porções do ruído magnético ambiente antes de qualquer processamento adicional.
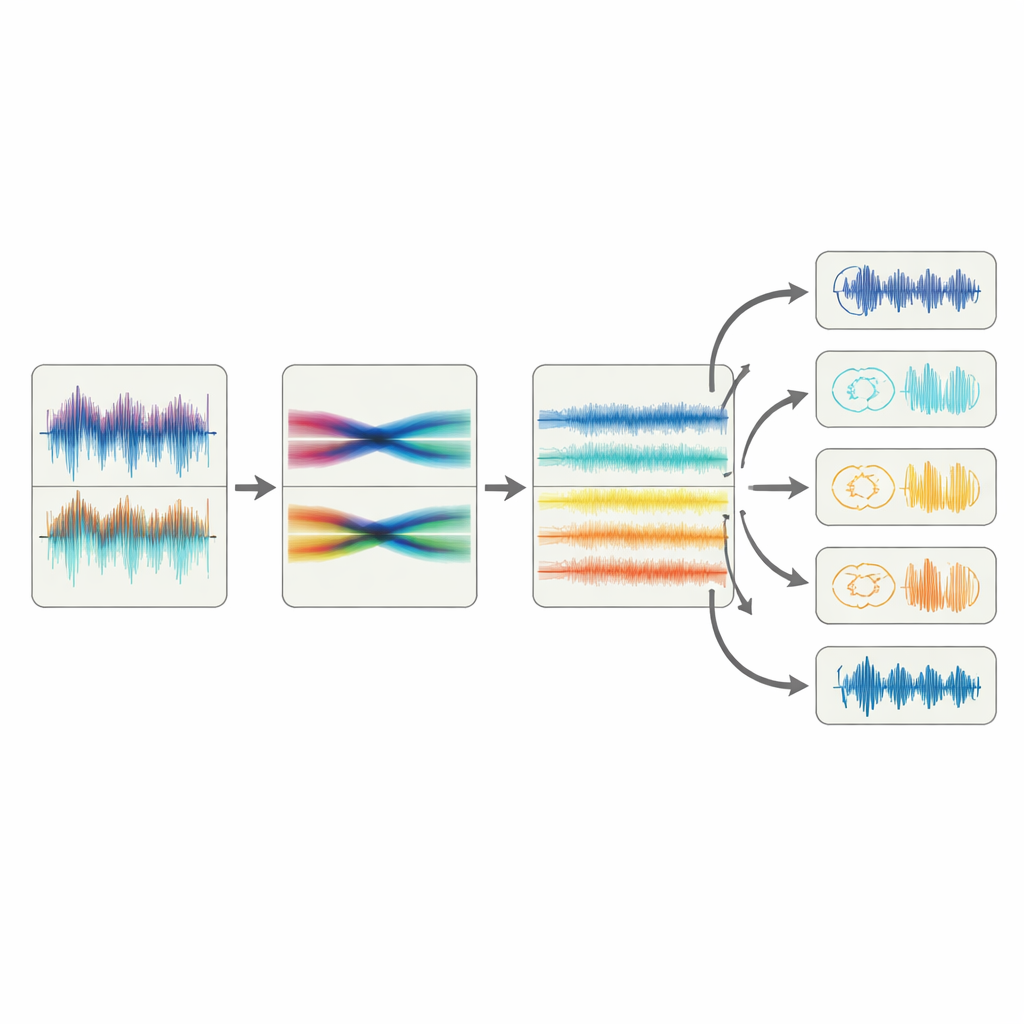
Domando o ruído colorido e dividindo o sinal
Mesmo após o processamento de coerência, o ruído residual comporta-se de forma bem diferente do ruído aleatório ideal assumido em muitos algoritmos. Para uniformizar a situação, a equipe aplica um filtro de whitening que remodela o espectro para que a energia do ruído fique mais homogênea entre as frequências, sem deslocar a frequência verdadeira do eixo. Em seguida vem a decomposição modal variacional, um método matematicamente fundamentado para dividir o sinal limpo em várias faixas mais simples, cada uma cobrindo uma fatia diferente do espectro. Nessas modos intrínsecas, o campo oculto na frequência do eixo pode sobressair-se com mais clareza em relação ao ruído residual do que no sinal original misturado.
Deixando o caos apontar para o alvo
A etapa final de detecção usa um sistema caótico especialmente projetado chamado oscilador Duffing diferencial de duplo acoplamento. Esse oscilador não linear é incomumente sensível a pequenos sinais periódicos: quando sua frequência de excitação interna varre a faixa onde está a frequência desconhecida do eixo, o sistema passa brevemente para um estado intermitente característico duas vezes em sucessão. Ao escanear cada faixa de sinal decomposta e observar essas transições pareadas, o método pode confirmar a presença da frequência do eixo e estimar seu valor. Os autores automatizam ainda mais essa etapa usando uma medida chamada entropia amostral para escolher a intensidade de excitação adequada, garantindo que o oscilador responda de forma confiável sem ser enganado pelo ruído.
Comprovando em laboratório e em campo
Os pesquisadores testam toda a cadeia — realce por coerência, whitening, decomposição e detecção caótica — em sinais sintéticos e em medições reais feitas à beira de um lago usando uma bobina que simula o campo na frequência do eixo de um navio. Eles comparam o desempenho com denoising por wavelet, realce adaptativo de linhas, modelos de aprendizado profundo e abordagens anteriores baseadas em Duffing. Enquanto muitos desses métodos falham quando o sinal está 20 a 40 decibéis abaixo do ruído, a nova abordagem ainda identifica corretamente a frequência do eixo na maioria dos casos e mantém baixas as taxas de falso alarme. Em um cenário de campo com um sinal enterrado mais de 50 decibéis abaixo do ruído, o método alcançou mais de 95% de acurácia de detecção.
O que isso significa para o sensoriamento oceânico silencioso
Em termos simples, este trabalho mostra que o “pulso” magnético do eixo giratório de um navio pode ser detectado muito além do que técnicas antigas permitiam, mesmo em águas reais e turbulentas. Ao combinar inteligentemente dois sensores, filtragem avançada e um detector baseado em caos, o método revela um padrão regular onde a análise comum vê principalmente aleatoriedade. Essa detecção ultra-sensível e não acústica pode complementar o sonar, ajudando a rastrear navios de superfície e veículos subaquáticos mantendo-se passiva e difícil de ser detectada em retorno.
Citação: Qiu, H., Yang, P., Huang, C. et al. Dual-sensor coherence-driven adaptive denoising (WF-VMD-DDCDO) for underwater target detection. Sci Rep 16, 14067 (2026). https://doi.org/10.1038/s41598-026-41814-7
Palavras-chave: detecção de alvos subaquáticos, sensoriamento magnético, remoção de ruído de sinal, eletromagnetismo marinho, osciladores caóticos