Clear Sky Science · sv
En bionisk robottrunk med tensegrity‑aktiverad elefantliknande styvhetsvariabilitet för stöd i vardagen
Varför en robottrunk spelar roll i vardagen
Föreställ dig att ha en extra arm som är tillräckligt försiktig för att ge dig en TV‑kontroll utan att välta ett glas, men samtidigt stark nog att lyfta en tung låda från en hylla. Denna studie presenterar en robotisk ”trunk”, inspirerad av elefanter, som snabbt kan växla mellan mjuk och följsam till stel och kraftfull. Monterad på en rullstol och styrd via ett enkelt gränssnitt är den utformad för att hjälpa personer med begränsad rörlighet att utföra vardagliga sysslor hemma och i offentliga miljöer.

Att lära av elefantens nos
Elefanttrunkar är biologiska multiverktyg: de kan skala en banan utan att krossa den och samtidigt lyfta laster tyngre än vad många människor klarar. De gör detta genom att ständigt justera hur stela eller mjuka deras muskler är, genom att spänna grupper av muskler när kraft behövs och slappna av vid finmotoriska rörelser. Ingenjörer har länge försökt efterlikna detta med luftfyllda strukturer, låsmekanismer eller specialmaterial som hårdnar och mjuknar med temperatur. Men tidigare robotdesigner erbjöd vanligtvis bara några fasta styvhetsnivåer, krävde klumpiga pumpar eller ändrade sig för långsamt för att reagera i realtid.
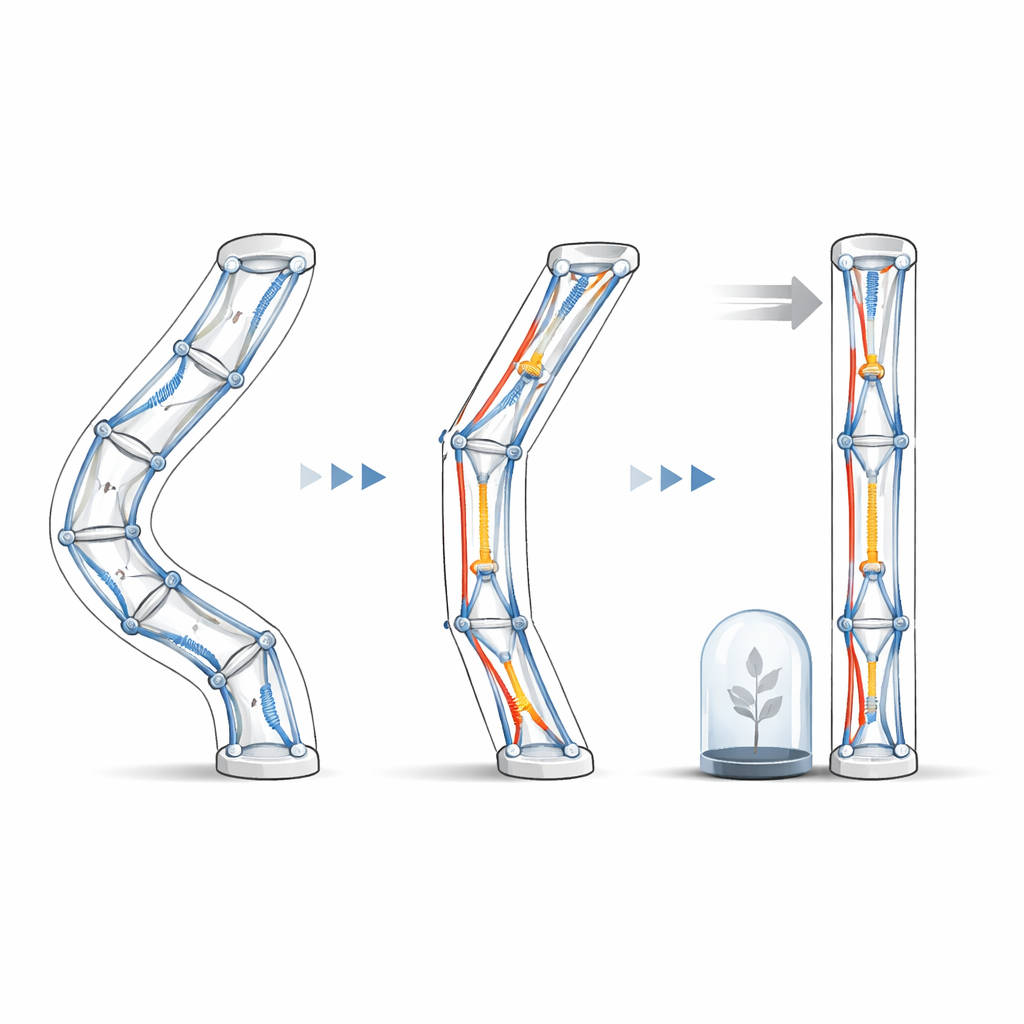
En flexibel stomme av kablar och fjädrar
Forskarna byggde en ny typ av robottrunk med en ”tensegrity”‑stomme—ett galler av styva stavar som hålls samman av ett nätverk av spända kablar och fjädrar. Trunken, knappt en meter lång och omkring ett kilo tung, är indelad i sektioner kopplade med smart arrangerade fjädrar. Genom att dra i eller släppa sex interna kablar med elmotorer kan teamet böja trunken i mjuka kurvor eller förkorta och räta ut den. När vissa kablar dras medan andra släpps blir trunken mjuk och ormlik, kapabel att slingra sig runt hinder. När alla kablar dras samtidigt kontraherar strukturen, fjädrarna töjs och lagrar elastisk energi, och trunken blir mycket stel.
Från försiktig beröring till tung lyftning
Genom noggranna experiment och datorbaserade modeller visade teamet att deras trunk kan förändra sin böjstyvhet med mer än en storleksordning, från mycket följsam till mycket styv, och göra det på ungefär en sekund. Interna mätningar visade att vissa fjädrar töjs flera gånger sin ursprungliga längd under kontraktion, vilket dramatiskt ökar den lagrade energin och därmed den totala styvheten. I praktiska tester kunde trunken böja sig runt trånga utrymmen för att nå ett mål och sedan bli fast nog att punktera en ballong precist med en liten nål. Den lyfte också föremål som sträckte sig från ömtåliga ägg till tunga verktyg och dryckespaket samtidigt som den höll spetsen i nivå, enbart genom att justera hur hårt kablarna drogs.
Reagera i realtid på omvärlden
Eftersom styvheten kan växlas snabbt och upprepade gånger kan roboten reagera på förändrade situationer. I en demonstration höll trunken ett ägg medan en vattenflaska släpptes på det. När trunken var mjuk deformades den lätt och ägget sprack. När systemet först växlade trunken till ett stelt tillstånd absorberade den samma stöt utan att ägget gick sönder. I ett annat test stödde trunken en flaska som långsamt fylldes med vatten; när vikten ökade förkortade och förstärkte roboten sig automatiskt för att hålla flaskan stadig och i våg. Dessa exempel visar hur en trunk med variabel styvhet både kan fungera som en försiktig manipulator och som en skyddande struktur vid oväntade stötar eller påkänningar.
Hjälpa människor i vardagsmiljöer
För att utforska verklig användning monterade forskarna den robotiska trunken på en elektrisk rullstol och lade till en kamera, ett mjukt gripdon och en enkel kontrollpanel. En användare styr rullstolen med en joystick och guidar trunken med en annan, medan en skärm visar kamerabilden. Med förinställda rörelser och manuell finjustering kunde både en frisk frivillig och en person efter stroke använda systemet för att utföra vardagliga uppgifter: öppna skåpluckor, placera böcker på höga hyllor, lasta tvätt i en tvättmaskin, slänga skräp samt hämta mat och dryck i butiker och restauranger. Genom att dra i en kontroll för att ändra styvhet kunde användare göra trunken mjuk vid arbete i trånga utrymmen eller vid hantering av lätta föremål, och stel vid tyngre lyft eller när exakt placering krävdes.
Vad detta betyder för framtiden
Detta arbete visar att en kabel‑och‑fjäderrobot inspirerad av en elefants trunk kan matcha djurets breda spektrum av styvhet och snabba växling, samtidigt som den är tillräckligt lätt och kompakt för att monteras på en rullstol. Möjligheten att smidigt övergå från försiktig, följsam rörelse till starkt, bärande stöd gör trunken särskilt lovande för hjälpteknik där säkerhet och anpassningsförmåga är avgörande. Trots att långtidshållbarhet och mer intelligent sensorteknik fortfarande behöver förbättras pekar studien mot en framtid där personer med begränsad rörlighet kan förlita sig på högresponsiva robotassistenter för att utöka sin räckvidd och självständighet i vardagen.
Citering: Zhang, J., Yang, C., Yang, H. et al. A bionic robotic trunk with tensegrity-enabled elephant-comparable stiffness variability for assisted daily living. Nat Commun 17, 3545 (2026). https://doi.org/10.1038/s41467-026-70380-9
Nyckelord: mjukrobotik, hjälpteknik, variabel styvhet, tensegrity, rullstolsrobotik