Clear Sky Science · de
Ein bionischer Roboterrüssel mit durch Tensegrity ermöglichter, elefantenvergleichbarer Variabilität der Steifigkeit für unterstützte Alltagsbewältigung
Warum ein Roboterrüssel im Alltag wichtig ist
Stellen Sie sich vor, Sie hätten einen zusätzlichen Arm, der sanft genug ist, um Ihnen die TV-Fernbedienung zu reichen, ohne ein Glas umzuwerfen, und zugleich kräftig genug, um eine schwere Kiste aus einem Regal zu heben. Diese Studie stellt einen robotischen „Rüssel“ vor, inspiriert vom Elefanten, der schnell zwischen weich und flexibel oder steif und kraftvoll wechseln kann. Auf einem Rollstuhl montiert und über eine einfache Benutzeroberfläche steuerbar, soll er Menschen mit eingeschränkter Mobilität dabei helfen, alltägliche Aufgaben zu Hause und in der Öffentlichkeit zu bewältigen.

Vom Elefantenrüssel lernen
Elefantenrüssel sind biologische Multitools: Sie können eine Banane schälen, ohne sie zu zerdrücken, und zugleich Lasten heben, die schwerer sind als das, was viele Menschen bewältigen können. Sie erreichen dies, indem sie kontinuierlich die Steifigkeit ihrer Muskeln anpassen, Muskelgruppen bei Kraftbedarf zusammenziehen und sie für feinfühlige Bewegungen entspannen. Ingenieurinnen und Ingenieure versuchen seit langem, diesen Trick mit luftgefüllten Strukturen, Verriegelungsmechanismen oder speziellen Materialien nachzubilden, die sich mit der Temperatur verhärten oder erweichen. Diese früheren Robotermodelle boten jedoch meist nur wenige feste Steifigkeitsstufen, benötigten sperrige Pumpen oder reagierten zu langsam für Echtzeitanwendungen.
Ein flexibles Skelett aus Kabeln und Federn
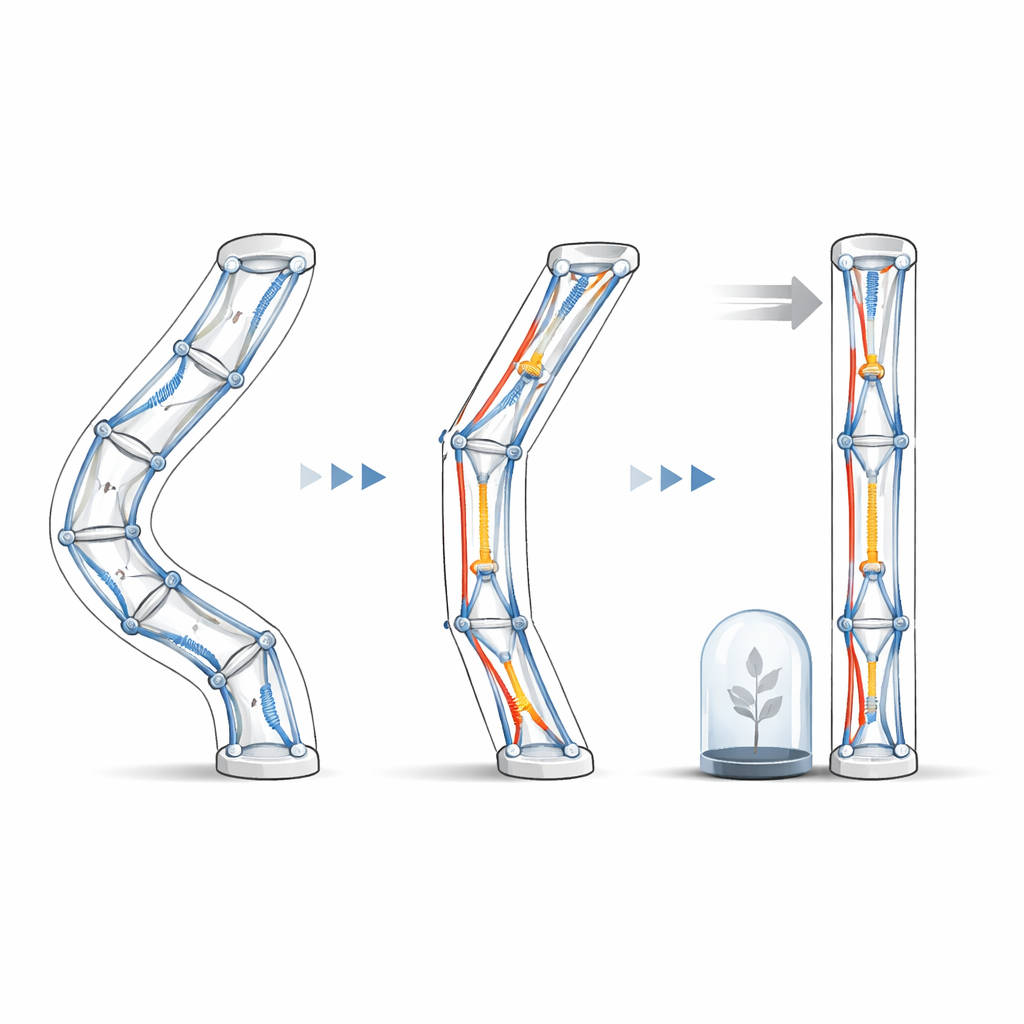
Die Forschenden bauten einen neuen Typ Roboterrüssel mit einem Tensegrity-Skelett—ein Gitter aus starren Stäben, zusammengehalten von einem Netz gespannter Kabel und Federn. Der Rüssel ist knapp einen Meter lang und wiegt etwa ein Kilogramm; er ist in Abschnitte unterteilt, die durch geschickt angeordnete Federn verbunden sind. Durch Ziehen oder Loslassen von sechs inneren Kabeln mit Elektromotoren kann das Team den Rüssel in sanfte Kurven biegen oder ihn verkürzen und strecken. Wenn bestimmte Kabel gezogen und andere gelockert werden, wird der Rüssel weich und schlangenähnlich und kann Hindernisse umschlängeln. Zieht hingegen alle Kabel gemeinsam, kontrahiert die Struktur, die Federn dehnen sich und speichern elastische Energie, und der Rüssel wird deutlich steifer.
Von sanfter Berührung bis hin zu schwerem Heben
Durch sorgfältige Experimente und Computermodellierung zeigte das Team, dass sich die Biegesteifigkeit ihres Rüssels um mehr als eine Größenordnung ändern lässt—von sehr flexibel bis sehr starr—und dies in etwa einer Sekunde. Interne Messungen zeigten, dass bestimmte Federn sich während der Kontraktion um ein Vielfaches ihrer Anfangslänge dehnen, wodurch die gespeicherte Energie und damit die Gesamtsteifigkeit dramatisch zunimmt. In praktischen Tests konnte der Rüssel sich um enge Stellen biegen, um ein Ziel zu erreichen, und sich dann versteifen, um präzise mit einer kleinen Nadel einen Ballon zu durchstechen. Er hob außerdem Objekte von zerbrechlichen Eiern bis zu schweren Werkzeugen und Getränkepackungen, wobei die Spitze einfach durch Anpassen der Kabelzugkräfte waagerecht gehalten wurde.
Echtzeitreaktion auf die Umgebung
Da die Steifigkeit schnell und wiederholt umschaltbar ist, kann der Roboter auf wechselnde Situationen reagieren. Bei einer Vorführung hielt der Rüssel ein Ei, während eine Wasserflasche darauf fallen gelassen wurde. War der Rüssel weich, verformte er sich leicht und das Ei zerbrach. Schaltete das System den Rüssel zuvor in einen starren Zustand, nahm die Struktur denselben Aufprall auf, ohne das Ei zu zerstören. In einem weiteren Test stützte der Rüssel eine langsam mit Wasser gefüllte Flasche; als das Gewicht zunahm, verkürzte und versteifte sich der Roboter automatisch, um die Flasche stabil und waagerecht zu halten. Diese Beispiele zeigen, wie ein Rüssel mit variabler Steifigkeit sowohl als sanfter Greifer als auch als schützende Struktur bei unerwarteten Stößen fungieren kann.
Menschen im Alltag unterstützen
Um die Anwendung in der realen Welt zu prüfen, montierten die Forschenden den Roboterrüssel auf einen elektrischen Rollstuhl und statteten ihn mit einer Kamera, einem weichen Greifer und einem einfachen Bedienpanel aus. Die Nutzerin steuert den Rollstuhl mit einem Joystick und lenkt den Rüssel mit einem zweiten, während ein Bildschirm die Kameraperspektive zeigt. Mit voreingestellten Bewegungen und manueller Feinabstimmung nutzten sowohl eine gesunde Versuchsperson als auch eine post‑stroke‑Person das System, um alltägliche Aufgaben zu erledigen: Schranktüren öffnen, Bücher auf hohe Regale stellen, Wäsche in die Waschmaschine laden, Müll entsorgen und in Geschäften sowie Restaurants Essen und Getränke holen. Durch Verschieben eines Reglers zur Änderung der Steifigkeit konnten die Anwender den Rüssel beim Arbeiten in engen Bereichen oder beim Umgang mit leichten Gegenständen weich und bei schwereren Lasten oder für präzise Platzierungen steif machen.
Was das für die Zukunft bedeutet
Diese Arbeit zeigt, dass ein Kabel‑Feder‑Roboter, inspiriert vom Elefantenrüssel, dessen weites Spektrum an Steifigkeit und schnellem Umschalten erreichen kann, und dabei leicht und kompakt genug ist, um auf einem Rollstuhl montiert zu werden. Die Fähigkeit, nahtlos von sanfter, nachgiebiger Bewegung zu starker, lasttragender Unterstützung überzugehen, macht den Rüssel besonders vielversprechend für Assistenztechnologien, bei denen Sicherheit und Anpassungsfähigkeit entscheidend sind. Zwar müssen Langzeithaltbarkeit und intelligentere Sensorik noch verbessert werden, doch die Studie weist in Richtung einer Zukunft, in der Menschen mit eingeschränkter Mobilität sich auf hochreaktive robotische Helfer verlassen können, um ihre Reichweite und Unabhängigkeit im Alltag zu erweitern.
Zitation: Zhang, J., Yang, C., Yang, H. et al. A bionic robotic trunk with tensegrity-enabled elephant-comparable stiffness variability for assisted daily living. Nat Commun 17, 3545 (2026). https://doi.org/10.1038/s41467-026-70380-9
Schlüsselwörter: Soft Robotics, assistive Technologie, variable Steifigkeit, Tensegrity, Rollstuhlrobotik