Clear Sky Science · nl
Een bionische robotische slurf met tensegrity-geactiveerde stijfheidsvariatie vergelijkbaar met een olifant voor hulp bij dagelijkse activiteiten
Waarom een robotslurf van betekenis is in het dagelijks leven
Stel je een extra arm voor die zacht genoeg kan zijn om je tv-afstandsbediening aan te reiken zonder een glas om te stoten, maar ook sterk genoeg om een zware doos van een plank te tillen. Deze studie introduceert een robotische “slurf”, geïnspireerd op olifanten, die snel kan schakelen tussen zacht en buigzaam of stijf en krachtig. Gemonteerd op een rolstoel en bestuurd via een eenvoudige interface, is hij ontworpen om mensen met beperkte mobiliteit te helpen bij alledaagse taken thuis en in openbare ruimtes.

Leren van de slurf van de olifant
Olifantslurven zijn biologische multigereedschappen: ze kunnen een banaan pellen zonder hem fijn te knijpen en tegelijk lastige lasten hijsen die zwaarder zijn dan wat veel mensen kunnen tillen. Ze doen dit door voortdurend te variëren hoe stijf of zacht hun spieren zijn, groepen spieren samen aan te spannen wanneer kracht nodig is en te ontspannen voor delicate bewegingen. Ingenieurs hebben dit al lange tijd geprobeerd na te bootsen met luchtgevulde structuren, vergrendelingsmechanismen of speciale materialen die harden en verzachten met temperatuur. Maar eerdere robotontwerpen boden meestal slechts een paar vaste stijfheidsinstellingen, vereisten omvangrijke pompen of reageerden te traag om in realtime te schakelen.
Een flexibel skelet van kabels en veren
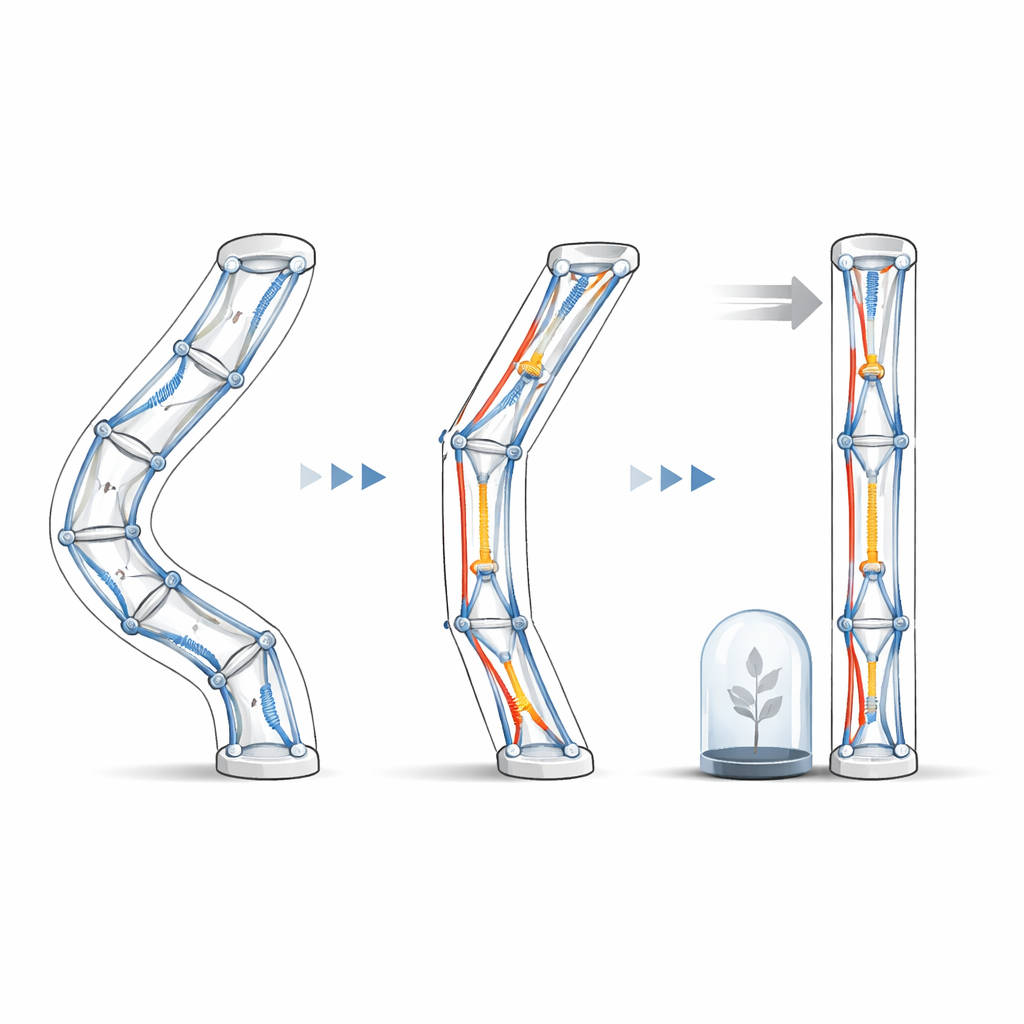
De onderzoekers bouwden een nieuw soort robotslurf met een “tensegrity”-skelet — een raster van stijve staven die bijeengehouden worden door een web van in spanning staande kabels en veren. De slurf, net geen meter lang en ongeveer een kilogram zwaar, is verdeeld in secties die met slim geplaatste veren verbonden zijn. Door zes interne kabels met elektrische motoren aan te trekken of te laten vieren, kan het team de slurf in vloeiende bochten buigen of inkorten en rechttrekken. Wanneer specifieke kabels worden aangetrokken terwijl andere worden ontspannen, wordt de slurf zacht en slangachtig en kan hij om obstakels heen kronkelen. Wanneer alle kabels samen trekken, trekt de structuur samen, rekken de veren uit en slaan ze elastische energie op, en wordt de slurf veel stijver.
Van zachte aanraking tot zwaar tillen
Door zorgvuldige experimenten en computermodellen liet het team zien dat hun slurf de buigstijfheid met meer dan een orde van grootte kan veranderen, van zeer flexibel tot zeer rigide, en dat in ongeveer een seconde kan doen. Interne metingen toonden aan dat bepaalde veren tijdens contractie meerdere keren hun beginoling uitrekken, waardoor de opgeslagen energie en daarmee de totale stijfheid sterk toenemen. In praktische tests kon de slurf om nauwe ruimtes buigen om een doel te bereiken en zich daarna verstevigen om precies met een klein naaldje een ballon te doorboren. Hij tilde ook objecten variërend van fragiele eieren tot zware gereedschappen en drinkpakken terwijl hij zijn punt waterpas hield, eenvoudig door aan te passen hoe hard de kabels werden aangetrokken.
Reageren in realtime op de omgeving
Omdat de stijfheid snel en herhaaldelijk kan worden geschakeld, kan de robot reageren op veranderende situaties. In één demonstratie hield de slurf een ei vast terwijl er een waterfles op werd gegooid. Wanneer de slurf zacht was, vervormde hij gemakkelijk en brak het ei. Toen het systeem eerst de slurf in een stijve toestand schakelde, absorbeerde hij dezelfde impact zonder het ei te breken. In een andere test ondersteunde de slurf een fles die langzaam met water werd gevuld; naarmate het gewicht toenam, trok de robot automatisch samen en verstevigde om de fles stabiel en waterpas te houden. Deze voorbeelden tonen aan hoe een variabele-stijfheidsslurf zowel kan dienen als zachte manipulator als beschermende structuur bij onverwachte stoten of impacten.
Mensen helpen in dagelijkse omgevingen
Om het gebruik in de echte wereld te verkennen, monteerden de onderzoekers de robotslurf op een elektrische rolstoel en voegden een camera, zachte grijper en eenvoudig bedieningspaneel toe. Een gebruiker bestuurt de rolstoel met één joystick en leidt de slurf met een andere, terwijl een scherm het camerabeeld toont. Met vooraf ingestelde bewegingen en handmatige fijnregeling gebruikten zowel een gezonde vrijwilliger als een persoon na een beroerte het systeem om dagelijkse taken uit te voeren: keukenkastjes openen, boeken op hoge planken plaatsen, wasgoed in de wasmachine laden, afval weggooien en eten en drinken ophalen in winkels en restaurants. Door een bediening te schuiven om de stijfheid te veranderen, konden gebruikers de slurf zacht maken bij werkzaamheden in krappe ruimtes of bij lichte voorwerpen, en stijf bij het dragen van zwaardere lasten of wanneer nauwkeurige plaatsing nodig was.
Wat dit betekent voor de toekomst
Dit werk toont aan dat een kabel-en-veerrobot geïnspireerd op de slurf van een olifant het brede bereik aan stijfheden en de snelle schakeling van het dier kan evenaren, terwijl hij licht en compact genoeg is om op een rolstoel te plaatsen. De mogelijkheid om soepel over te gaan van zachte, meegaande bewegingen naar sterke, dragende ondersteuning maakt de slurf bijzonder veelbelovend voor assistieve technologie, waar veiligheid en aanpasbaarheid cruciaal zijn. Hoewel de langdurige duurzaamheid en intelligenter sensoren nog verbetering behoeven, wijst de studie op een toekomst waarin mensen met beperkte mobiliteit kunnen vertrouwen op zeer responsieve robothulpen om hun bereik en zelfstandigheid in het dagelijks leven te vergroten.
Bronvermelding: Zhang, J., Yang, C., Yang, H. et al. A bionic robotic trunk with tensegrity-enabled elephant-comparable stiffness variability for assisted daily living. Nat Commun 17, 3545 (2026). https://doi.org/10.1038/s41467-026-70380-9
Trefwoorden: zachte robotica, hulpmiddelen, variabele stijfheid, tensegrity, rolstoelrobotica