Clear Sky Science · ru
Бионический роботизированный хобот с вариабельностью жесткости, сопоставимой со слоном, обеспечиваемой тенсегрити, для помощи в повседневной жизни
Почему робот‑хобот важен в повседневной жизни
Представьте дополнительную руку, которая может быть достаточно деликатной, чтобы поднести вам пульт от телевизора, не опрокинув стакан, и в то же время достаточно сильной, чтобы снять с полки тяжёлую коробку. В этом исследовании представлен роботизированный «хобот», вдохновлённый слоном, способный быстро переключаться между мягким гибким состоянием и жёстким мощным режимом. Установленный на инвалидной коляске и управляемый через простой интерфейс, он предназначен помогать людям с ограниченной подвижностью выполнять повседневные задачи дома и в общественных местах.

Учимся у слонового хобота
Слоновые хоботы — это биологические многоинструменты: они могут очистить банан, не раздавив его, и при этом поднять груз, который тяжелее того, что поднимут многие люди. Они добиваются этого постоянной регулировкой своей жёсткости: напрягают группы мышц для силы и расслабляют их для тонких движений. Инженеры давно пытаются повторить этот трюк с помощью наполненных воздухом структур, блокирующих механизмов или специальных материалов, твёрдеющих и размягчающихся при изменении температуры. Но более ранние роботы обычно предлагали лишь несколько фиксированных режимов жесткости, требовали громоздких насосов или меняли состояние слишком медленно, чтобы реагировать в реальном времени.
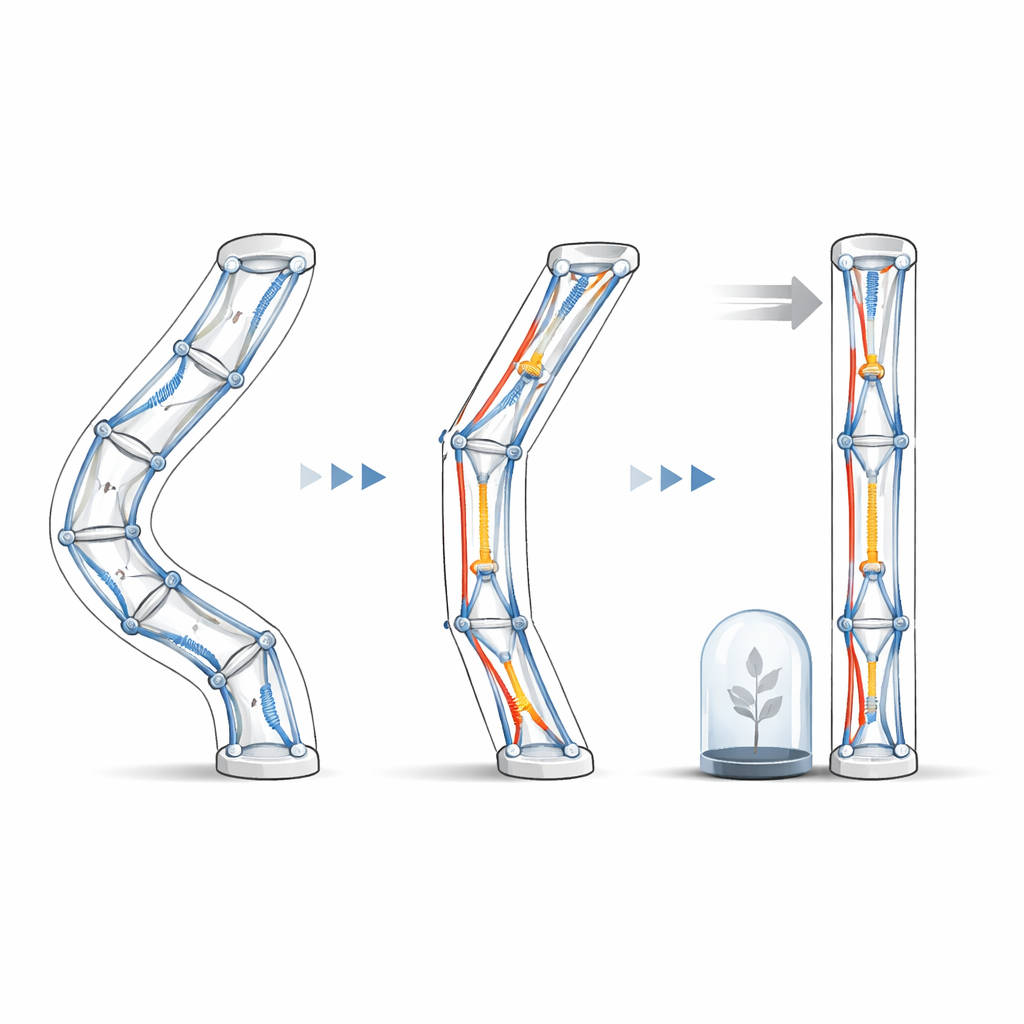
Гибкий скелет из тросов и пружин
Исследователи построили новый вид роботизированного хобота на основе скелета «тенсегрити» — решётки жёстких стержней, удерживаемых сетью натянутых тросов и пружин. Хобот длиной чуть менее метра и массой около килограмма разделён на секции, соединённые продуманно размещёнными пружинами. Натягивая или ослабляя шесть внутренних тросов с помощью электродвигателей, команда может сгибать хобот в плавные кривые или укорачивать и выпрямлять его. Когда одни тросы натягиваются, а другие ослабляются, хобот становится мягким и змееобразным, способным огибать препятствия. Когда все тросы тянут одновременно, конструкция сокращается, пружины растягиваются и аккумулируют упругую энергию, и хобот заметно жёстче.
От нежного прикосновения до тяжёлых подъёмов
Через тщательные эксперименты и компьютерное моделирование команда показала, что их хобот может менять жёсткость на изгиб более чем на порядок — от очень гибкого до очень жёсткого — и делать это примерно за секунду. Внутренние измерения показали, что некоторые пружины растягиваются в несколько раз от первоначальной длины при сокращении, что резко увеличивает запасённую энергию и, следовательно, общую жёсткость. В практических тестах хобот мог огибать узкие пространства, чтобы достичь цели, а затем затвердевать и точно проколоть шарик маленькой иглой. Он также поднимал предметы от хрупких яиц до тяжёлых инструментов и пакетов с напитками, сохраняя при этом уровень наконечника, просто регулируя силу натяжения тросов.
Реакция в реальном времени на окружение
Поскольку жёсткость можно переключать быстро и многократно, робот может реагировать на меняющиеся обстоятельства. В одной демонстрации хобот держал яйцо, в то время как на него роняли бутылку с водой. Когда хобот был мягким, он легко деформировался и яйцо треснуло. Когда система сначала переключила хобот в жёсткое состояние, он поглотил тот же удар, не разбив яйцо. В другом тесте хобот поддерживал бутылку, которую медленно наполняли водой; по мере увеличения веса робот автоматически укорачивался и ужесточался, чтобы держать бутылку устойчиво и ровно. Эти примеры показывают, как хобот с переменной жесткостью может служить и деликатным манипулятором, и защитной структурой при неожиданных столкновениях или ударах.
Помощь людям в повседневной среде
Чтобы изучить использование в реальных условиях, исследователи смонтировали робот‑хобот на электрической инвалидной коляске и добавили камеру, мягкий захват и простую панель управления. Пользователь управляет коляской одним джойстиком и направляет хобот другим, а экран показывает изображение с камеры. С предустановленными движениями и ручной доводкой как здоровый доброволец, так и человек после инсульта использовали систему для выполнения повседневных задач: открывали дверцы шкафов, ставили книги на верхние полки, загружали бельё в стиральную машину, выбрасывали мусор и доставали еду и напитки в магазинах и ресторанах. Переключая регулятор жёсткости, пользователи могли сделать хобот мягким при работе в тесных пространствах или с лёгкими предметами и жёстким при переноске более тяжёлых грузов или при необходимости точного размещения.
Что это означает для будущего
Эта работа демонстрирует, что робот на тросово‑пружинной основе, вдохновлённый слоновьим хоботом, может воспроизвести широкий диапазон его жёсткости и быстрое переключение, оставаясь при этом лёгким и компактным, чтобы уместиться на коляске. Возможность плавно переходить от нежного, комплаентного движения к сильной, несущей нагрузку поддержке делает хобот особенно перспективным для ассистивных технологий, где критичны безопасность и адаптивность. Хотя требуется улучшить долговечность в долгосрочной перспективе и более интеллектуальные датчики, исследование указывает на будущее, в котором люди с ограниченной подвижностью смогут полагаться на высокочувствительных роботизированных помощников, расширяющих их возможности и независимость в повседневной жизни.
Цитирование: Zhang, J., Yang, C., Yang, H. et al. A bionic robotic trunk with tensegrity-enabled elephant-comparable stiffness variability for assisted daily living. Nat Commun 17, 3545 (2026). https://doi.org/10.1038/s41467-026-70380-9
Ключевые слова: мягкая робототехника, ассистивные технологии, переменная жесткость, тенсегрити, робототехника для инвалидных колясок