Clear Sky Science · it
Un “tronco” robotico bionico con variabilità di rigidità paragonabile a quella degli elefanti grazie alla tensegrità per la vita quotidiana assistita
Perché un tronco robotico conta nella vita quotidiana
Immaginate di avere un braccio in più capace di essere così delicato da porgervi il telecomando senza far cadere un bicchiere, ma anche così potente da sollevare una scatola pesante da uno scaffale. Questo studio presenta un “tronco” robotico, ispirato agli elefanti, che può passare rapidamente da morbido e flessibile a rigido e potente. Montato su una sedia a rotelle e controllato tramite un’interfaccia semplice, è progettato per aiutare persone con mobilità ridotta a svolgere attività quotidiane in casa e negli spazi pubblici.

Imparare dal naso dell’elefante
I tronchi degli elefanti sono utensili biologici multifunzionali: possono sbucciare una banana senza schiacciarla e allo stesso tempo sollevare carichi più pesanti di quelli che molte persone possono sollevare. Ottengono questo risultato regolando continuamente la loro rigidità muscolare, tendendo gruppi di muscoli quando serve forza e rilassandoli per i movimenti delicati. Gli ingegneri da tempo cercano di replicare questo trucco usando strutture gonfiate d’aria, meccanismi di bloccaggio o materiali speciali che induriscono e ammorbidiscono con la temperatura. Ma questi primi progetti robotici offrivano solitamente solo pochi livelli di rigidità fissi, richiedevano pompe ingombranti o cambiavano troppo lentamente per reagire in tempo reale.
Uno scheletro flessibile di cavi e molle
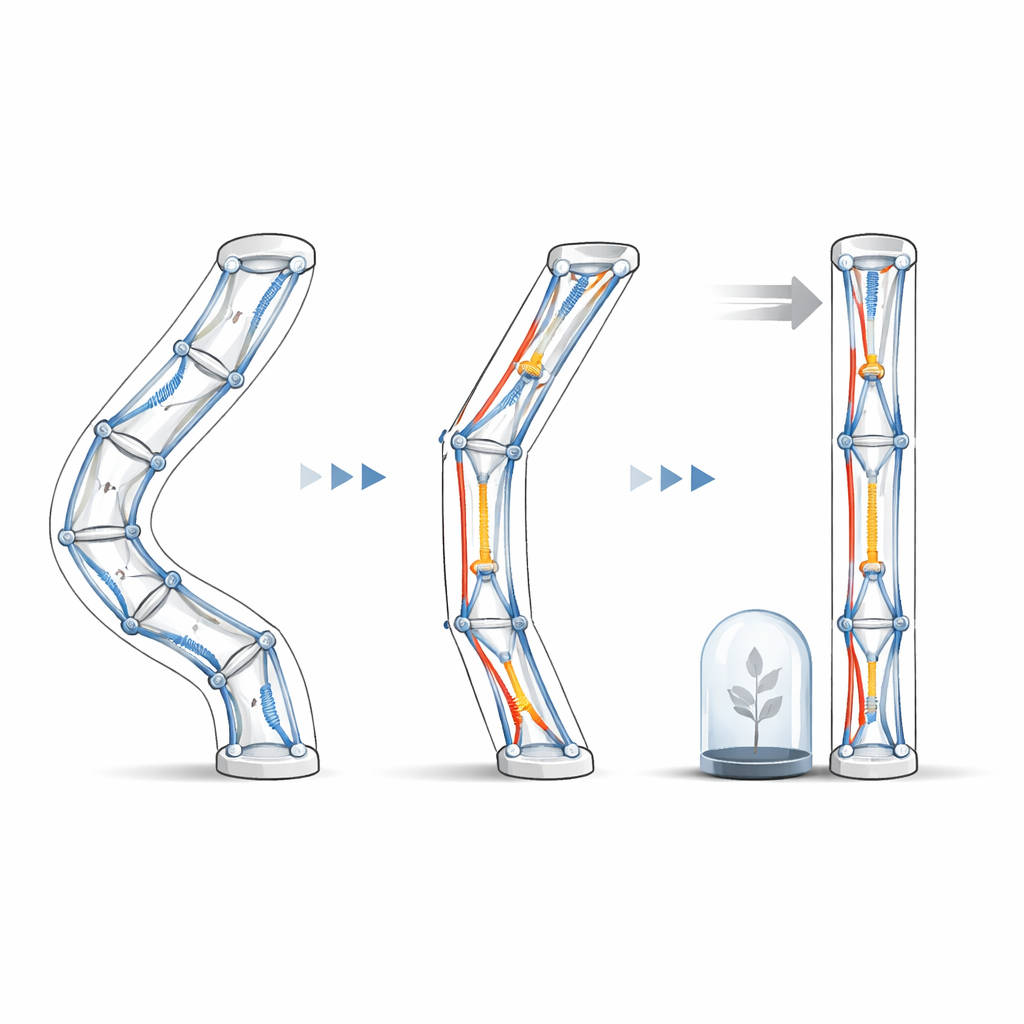
I ricercatori hanno costruito un nuovo tipo di tronco robotico usando uno scheletro a “tensegrità”: una maglia di barre rigide tenute insieme da una rete di cavi e molle in tensione. Il tronco, poco meno di un metro e con un peso di circa un chilogrammo, è diviso in sezioni collegate da molle disposte in modo intelligente. Tirando o rilasciando sei cavi interni con motori elettrici, il team può flettere il tronco in curve morbide o accorciarlo e raddrizzarlo. Quando specifici cavi vengono tesi mentre altri sono rilasciati, il tronco diventa morbido e serpentino, capace di aggirare ostacoli. Quando tutti i cavi tirano insieme, la struttura si contrae, le molle si allungano immagazzinando energia elastica e il tronco diventa molto più rigido.
Dal tocco delicato al sollevamento pesante
Attraverso esperimenti accurati e modellizzazione al computer, il gruppo ha dimostrato che il loro tronco può variare la sua rigidezza alla flessione di più di un ordine di grandezza, da molto flessibile a molto rigido, e farlo in circa un secondo. Misurazioni interne hanno rivelato che alcune molle si allungano più volte rispetto alla lunghezza iniziale durante la contrazione, aumentando notevolmente l’energia immagazzinata e quindi la rigidità complessiva. Nei test pratici, il tronco è stato in grado di piegarsi attorno a spazi stretti per raggiungere un bersaglio e poi irrigidirsi per bucare un palloncino con precisione usando un piccolo ago. Ha anche sollevato oggetti che andavano da fragili uova a utensili pesanti e confezioni di bevande mantenendo la punta livellata, semplicemente regolando la forza con cui i cavi venivano tirati.
Reagire in tempo reale al mondo
Poiché la rigidità può essere commutata rapidamente e ripetutamente, il robot può rispondere a situazioni in evoluzione. In una dimostrazione, il tronco ha sostenuto un uovo mentre su di esso veniva fatto cadere una bottiglia d’acqua. Quando il tronco era morbido si deformava facilmente e l’uovo si rompeva. Quando il sistema ha prima portato il tronco in uno stato rigido, ha assorbito lo stesso impatto senza rompere l’uovo. In un altro test, il tronco ha sostenuto una bottiglia riempita lentamente d’acqua; con l’aumentare del peso il robot si è automaticamente accorciato e irrigidito per mantenere la bottiglia stabile e in piano. Questi esempi mostrano come un tronco a rigidità variabile possa fungere sia da manipolatore delicato sia da struttura protettiva durante urti o impatti imprevisti.
Aiutare le persone negli ambienti quotidiani
Per esplorare l’uso nel mondo reale, i ricercatori hanno montato il tronco robotico su una sedia a rotelle elettrica e vi hanno aggiunto una telecamera, una pinza morbida e un pannello di controllo semplice. Un utente guida la sedia con un joystick e controlla il tronco con un altro, mentre uno schermo mostra la vista della telecamera. Con movimenti preimpostati e regolazioni manuali fini, sia un volontario sano sia una persona post-ictus hanno utilizzato il sistema per svolgere compiti quotidiani: aprire sportelli, collocare libri su mensole alte, caricare il bucato nella lavatrice, buttare via i rifiuti e recuperare cibi e bevande in negozi e ristoranti. Scorrendo un controllo per cambiare la rigidità, gli utenti potevano rendere il tronco morbido quando lavoravano in spazi angusti o con oggetti leggeri, e rigido quando trasportavano carichi più pesanti o necessitavano di posizionamenti precisi.
Cosa significa questo per il futuro
Questo lavoro dimostra che un robot a cavi e molle ispirato al tronco dell’elefante può raggiungere l’ampia gamma di rigidità dell’animale e il rapido cambio di stato, pur essendo abbastanza leggero e compatto da essere montato su una sedia a rotelle. La capacità di passare fluidamente da movimenti delicati e conformi a un supporto robusto e portante rende il tronco particolarmente promettente per la tecnologia assistiva, dove sicurezza e adattabilità sono critiche. Sebbene la durabilità a lungo termine e sensori più intelligenti debbano ancora essere migliorati, lo studio indica un futuro in cui persone con mobilità ridotta possono contare su assistenti robotici altamente reattivi per estendere la loro autonomia e indipendenza nella vita quotidiana.
Citazione: Zhang, J., Yang, C., Yang, H. et al. A bionic robotic trunk with tensegrity-enabled elephant-comparable stiffness variability for assisted daily living. Nat Commun 17, 3545 (2026). https://doi.org/10.1038/s41467-026-70380-9
Parole chiave: robotica morbida, tecnologia assistiva, rigidezza variabile, tensegrità, robotica per sedie a rotelle