Clear Sky Science · en
A bionic robotic trunk with tensegrity-enabled elephant-comparable stiffness variability for assisted daily living
Why a Robot Trunk Matters for Everyday Life
Imagine having an extra arm that can be gentle enough to hand you a TV remote without knocking over a glass, yet strong enough to lift a heavy box from a shelf. This study introduces a robotic “trunk,” inspired by elephants, that can rapidly switch between soft and flexible or stiff and powerful. Mounted on a wheelchair and controlled through a simple interface, it is designed to help people with limited mobility carry out everyday tasks at home and in public spaces.

Learning from the Elephant’s Nose
Elephant trunks are biological multi-tools: they can peel a banana without squashing it and also hoist loads heavier than many people can lift. They manage this by constantly adjusting how stiff or soft their muscles are, tightening groups of muscles together when strength is needed and relaxing them for delicate movements. Engineers have long tried to replicate this trick using air-filled structures, locking mechanisms, or special materials that harden and soften with temperature. But these earlier robot designs usually offered only a few fixed stiffness settings, required bulky pumps, or changed too slowly to react in real time.
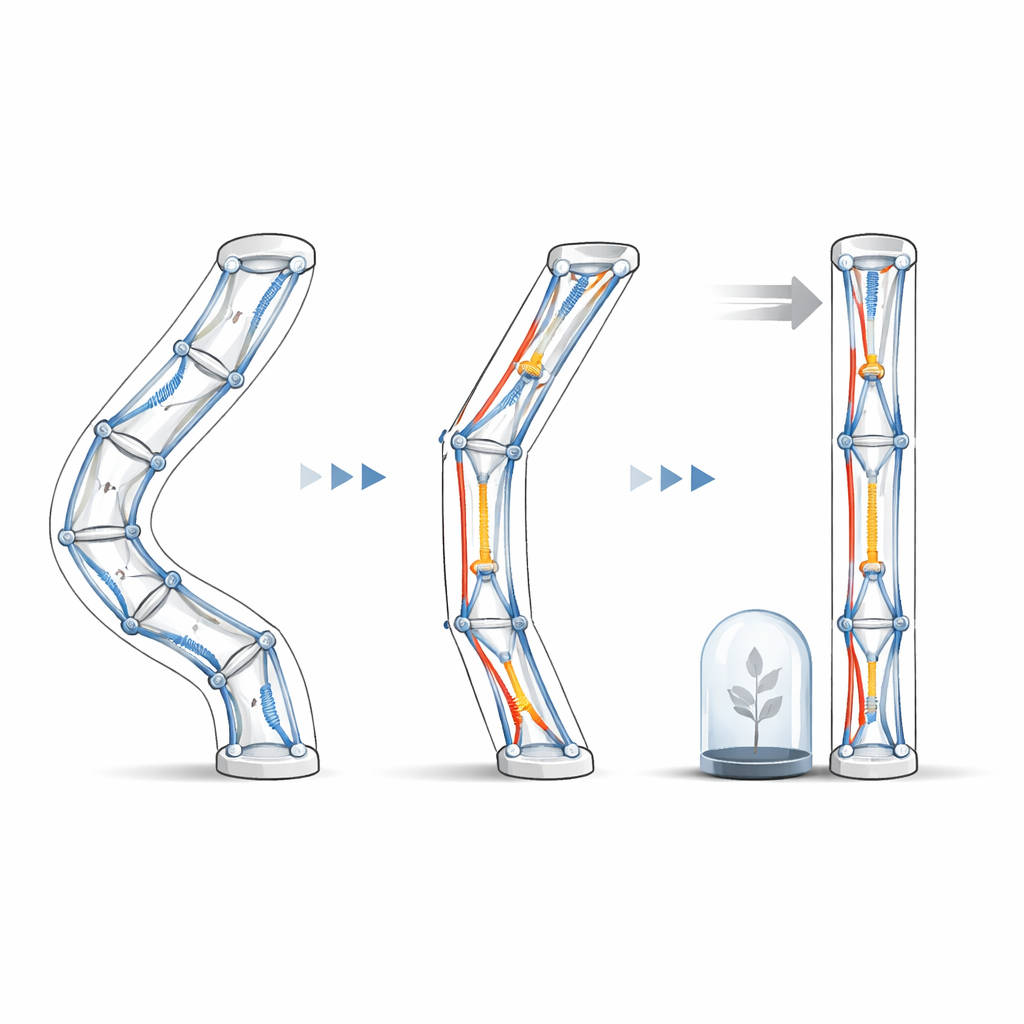
A Flexible Skeleton of Cables and Springs
The researchers built a new kind of robotic trunk using a “tensegrity” skeleton—a lattice of rigid bars held together by a web of tensioned cables and springs. The trunk, just under a meter long and about one kilogram in weight, is divided into sections connected by cleverly arranged springs. By pulling or releasing six internal cables with electric motors, the team can bend the trunk into smooth curves or shorten and straighten it. When specific cables are pulled while others are released, the trunk becomes soft and snakelike, able to weave around obstacles. When all the cables pull together, the structure contracts, the springs stretch and store elastic energy, and the trunk becomes much stiffer.
From Gentle Touch to Heavy Lifting
Through careful experiments and computer modeling, the team showed that their trunk can change its bending stiffness by more than an order of magnitude, from very flexible to very rigid, and do so in about a second. Internal measurements revealed that certain springs stretch several times their initial length during contraction, dramatically increasing the stored energy and thus the overall stiffness. In practical tests, the trunk could bend around tight spaces to reach a target and then firm up to puncture a balloon precisely with a small needle. It also lifted objects ranging from fragile eggs to heavy tools and drink packs while keeping its tip level, simply by adjusting how hard the cables were pulled.
Reacting in Real Time to the World
Because stiffness can be switched rapidly and repeatedly, the robot can respond to changing situations. In one demonstration, the trunk held an egg while a water bottle was dropped onto it. When the trunk was soft, it deformed easily and the egg cracked. When the system first switched the trunk to a rigid state, it absorbed the same impact without breaking the egg. In another test, the trunk supported a bottle being slowly filled with water; as the weight increased, the robot automatically shortened and stiffened to keep the bottle steady and level. These examples show how a variable-stiffness trunk can serve both as a gentle manipulator and as a protective structure during unexpected bumps or impacts.
Helping People in Daily Environments
To explore real-world use, the researchers mounted the robotic trunk on an electric wheelchair and added a camera, soft gripper, and simple control panel. A user steers the wheelchair with one joystick and guides the trunk with another, while a screen shows the camera view. With preset motions and manual fine-tuning, both a healthy volunteer and a post-stroke individual used the system to perform everyday tasks: opening cabinet doors, placing books on high shelves, loading laundry into a washing machine, throwing away trash, and retrieving food and drinks in shops and restaurants. By sliding a control to change stiffness, users could make the trunk soft when working in cramped spaces or handling light items, and stiff when carrying heavier loads or needing precise placement.
What This Means for the Future
This work demonstrates that a cable-and-spring robot inspired by an elephant’s trunk can match the animal’s wide range of stiffness and quick switching, while being light and compact enough to ride on a wheelchair. The ability to smoothly transition from gentle, compliant motion to strong, load-bearing support makes the trunk especially promising for assistive technology, where safety and adaptability are critical. Although long-term durability and more intelligent sensing still need improvement, the study points toward a future in which people with limited mobility can rely on highly responsive robotic helpers to extend their reach and independence in everyday life.
Citation: Zhang, J., Yang, C., Yang, H. et al. A bionic robotic trunk with tensegrity-enabled elephant-comparable stiffness variability for assisted daily living. Nat Commun 17, 3545 (2026). https://doi.org/10.1038/s41467-026-70380-9
Keywords: soft robotics, assistive technology, variable stiffness, tensegrity, wheelchair robotics