Clear Sky Science · fr
Une trompe robotique bionique avec une variabilité de raideur comparable à celle des éléphants grâce à la tensegrité pour l’assistance à la vie quotidienne
Pourquoi une trompe robotique compte pour la vie quotidienne
Imaginez disposer d’un bras supplémentaire capable d’être assez délicat pour vous tendre la télécommande sans renverser un verre, et en même temps assez puissant pour soulever une lourde boîte d’une étagère. Cette étude présente une « trompe » robotique, inspirée des éléphants, qui peut basculer rapidement entre un état souple et flexible et un état rigide et puissant. Montée sur un fauteuil roulant et commandée via une interface simple, elle est conçue pour aider les personnes à mobilité réduite à accomplir des tâches quotidiennes à la maison et dans les lieux publics.

S’inspirer du nez de l’éléphant
La trompe d’un éléphant est un outil biologique polyvalent : elle peut éplucher une banane sans l’écraser et aussi soulever des charges plus lourdes que ce que beaucoup de personnes peuvent soulever. Elle y parvient en ajustant en permanence la raideur de ses muscles, en contractant des groupes musculaires pour gagner en force et en les relâchant pour des mouvements délicats. Les ingénieurs ont longtemps tenté de reproduire cette capacité à l’aide de structures gonflables, de verrous mécaniques ou de matériaux spéciaux qui durcissent et ramollissent selon la température. Mais ces conceptions robotiques antérieures offraient généralement seulement quelques niveaux de raideur fixes, nécessitaient des pompes encombrantes ou réagissaient trop lentement pour fonctionner en temps réel.
Un squelette flexible de câbles et de ressorts
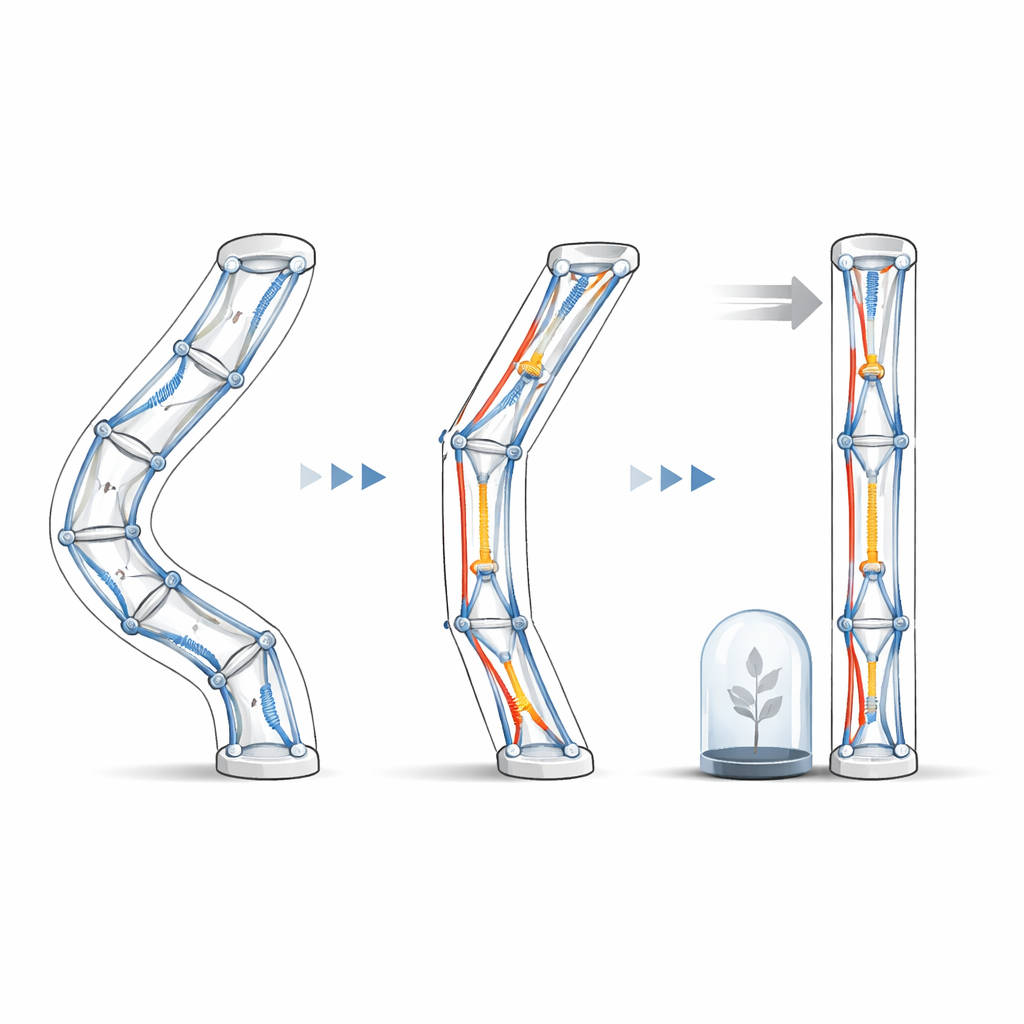
Les chercheurs ont construit un nouveau type de trompe robotique utilisant un squelette en « tensegrité » — une treillis de barres rigides maintenues par un réseau de câbles et de ressorts en tension. La trompe, juste en dessous d’un mètre de longueur et pesant environ un kilogramme, est divisée en sections reliées par des ressorts disposés astucieusement. En tirant ou en relâchant six câbles internes actionnés par des moteurs électriques, l’équipe peut courber la trompe en courbes lisses ou la raccourcir et la redresser. Lorsque certains câbles sont tirés tandis que d’autres sont relâchés, la trompe devient souple et serpentine, capable de contourner des obstacles. Lorsque tous les câbles se contractent ensemble, la structure se raccourcit, les ressorts s’étirent et emmagasinent de l’énergie élastique, et la trompe devient beaucoup plus raide.
Du toucher délicat au levage lourd
Grâce à des expériences soignées et à des modélisations informatiques, l’équipe a montré que sa trompe peut modifier sa raideur en flexion de plus d’un ordre de grandeur, passant d’un état très flexible à un état très rigide, et ce en environ une seconde. Les mesures internes ont révélé que certains ressorts s’étirent plusieurs fois leur longueur initiale lors de la contraction, augmentant fortement l’énergie stockée et donc la raideur globale. Lors d’essais pratiques, la trompe a pu se courber dans des espaces étroits pour atteindre une cible puis se raidir pour percer précisément un ballon avec une petite aiguille. Elle a également soulevé des objets allant d’œufs fragiles à des outils lourds et des packs de boisson tout en gardant sa pointe de niveau, simplement en ajustant la force de traction des câbles.
Réagir en temps réel au monde
Parce que la raideur peut être commutée rapidement et de façon répétée, le robot peut répondre à des situations changeantes. Dans une démonstration, la trompe tenait un œuf pendant qu’une bouteille d’eau y était lâchée dessus. Lorsque la trompe était souple, elle se déformait facilement et l’œuf se fissurait. Lorsque le système a d’abord rendu la trompe rigide, elle a absorbé le même impact sans casser l’œuf. Dans un autre test, la trompe soutenait une bouteille en cours de remplissage ; à mesure que le poids augmentait, le robot se raccourcissait et se raidissait automatiquement pour maintenir la bouteille stable et à niveau. Ces exemples montrent comment une trompe à raideur variable peut servir à la fois de manipulateur délicat et de structure protectrice lors de chocs ou d’impacts inattendus.
Aider les personnes dans les environnements quotidiens
Pour explorer l’usage en conditions réelles, les chercheurs ont monté la trompe robotique sur un fauteuil roulant électrique et y ont ajouté une caméra, une pince souple et un panneau de contrôle simple. Un utilisateur dirige le fauteuil avec un joystick et guide la trompe avec un autre, tandis qu’un écran affiche la vue de la caméra. Avec des mouvements préprogrammés et un réglage manuel fin, à la fois un volontaire en bonne santé et une personne post-AVC ont utilisé le système pour accomplir des tâches quotidiennes : ouvrir des portes d’armoires, placer des livres sur des étagères hautes, charger le linge dans une machine à laver, jeter des déchets et récupérer nourriture et boissons dans des magasins et des restaurants. En faisant glisser un contrôle pour changer la raideur, les utilisateurs pouvaient rendre la trompe souple pour travailler dans des espaces exigus ou manipuler des objets légers, et la rendre rigide pour porter des charges plus lourdes ou pour des placements précis.
Ce que cela signifie pour l’avenir
Ce travail démontre qu’un robot câblé et à ressorts, inspiré de la trompe d’un éléphant, peut égaler la large plage de raideur de l’animal et ses commutations rapides, tout en étant suffisamment léger et compact pour être monté sur un fauteuil roulant. La capacité à passer en douceur d’un mouvement conforme et délicat à un support robuste capable de porter des charges rend la trompe particulièrement prometteuse pour les technologies d’assistance, où la sécurité et l’adaptabilité sont essentielles. Bien que la durabilité à long terme et une détection plus intelligente nécessitent encore des améliorations, l’étude ouvre la voie vers un avenir où les personnes à mobilité réduite pourront compter sur des assistants robotiques très réactifs pour étendre leur portée et leur autonomie au quotidien.
Citation: Zhang, J., Yang, C., Yang, H. et al. A bionic robotic trunk with tensegrity-enabled elephant-comparable stiffness variability for assisted daily living. Nat Commun 17, 3545 (2026). https://doi.org/10.1038/s41467-026-70380-9
Mots-clés: robotique souple, technologie d’assistance, raideur variable, tensegrité, robotique pour fauteuil roulant