Clear Sky Science · ru
Гибкий многорегиональный нейроинтерфейс для декодирования поведенческого состояния у свободно движущихся мышей
Подслушивая повседневный распорядок мозга
Повседневные действия — отдых, прогулка или перекус — кажутся простыми, но возникают из синхронной активности миллионов нервных клеток глубоко в мозге. В этом исследовании показано, как новая система гибких сенсоров в сочетании с современным искусственным интеллектом может «подслушивать» сразу несколько областей мозга у свободно движущихся мышей и надежно определять, что делает животное. В долгосрочной перспективе такие технологии могут помочь учёным лучше понять расстройства мозга и создать более работоспособные интерфейсы мозг‑компьютер в условиях, близких к естественным, за пределами лаборатории.
Мягкое окно в занятый мозг
Традиционные зондовые электроды жёсткие и обычно считывают активность из одной области, что может раздражать ткани и упускать общую картину взаимодействия разных областей. Команда разработала многорегиональный гибкий зонд, решающий обе проблемы. Каждый зонд несёт восемь тонких «рукавов» или шанков с малыми золотыми контактами для записи. Умные омега‑образные изгибы в каждом шанке позволяют конструкции растягиваться и сгибаться вместе с мягкой тканью мозга, достигая удалённых областей без разрыва или натяжения. Испытания в гелевых «фантомах» мозга и на живых мышах показали, что устройство может охватывать более сантиметра ткани и сохранять стабильные электрические характеристики в течение недель, даже когда животные двигаются естественно.
Наблюдение за мышами во время отдыха, прогулок и кормления
Чтобы связать активность мозга с реальным поведением, исследователи построили прозрачную камеру, где мыши могли свободно перемещаться: на полу была подстилка, еда в фиксированном углу и лампа, дающая короткие вспышки света. Верхние камеры отслеживали положение головы и хвоста, а новый зонд записывал низкочастотные сигналы мозга до восьми областей, включая центры движения, осязания, памяти и зрения. Команда сосредоточилась на четырёх легко распознаваемых состояниях: отдых, прогулка по коробке, кормление в месте с едой и реакция на ритмичную световую вспышку. Тщательно пометив поведение по видеозаписям и сопоставив его с записями мозга, они составили богатый набор данных, охватывающий примерно неделю активного времени у четырёх мышей. 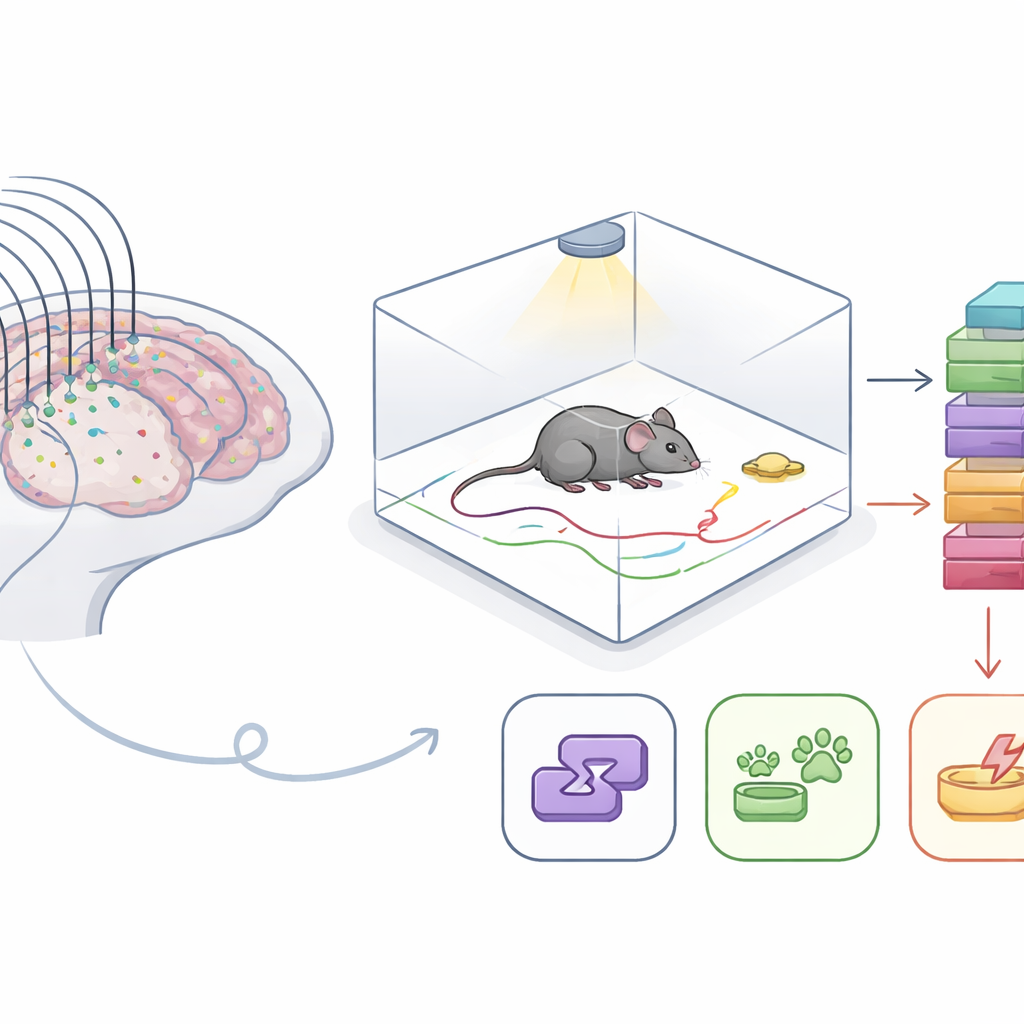
Обучение ИИ распознавать паттерны мозга
Сигналы мозга быстро меняются во времени и по разным областям, поэтому команда использовала модель глубокого обучения для поиска закономерностей, которые трудно разглядеть человеку. Их собственная модель «L‑Conformer» объединяет две идеи: одна часть выявляет короткосрочные формы в сигнале, а другая — механизм «внимания», отслеживающий отношения паттернов на более длинных временных отрезках. Прокатывая временное окно по записям, модель учится связывать каждый четырёхсекундный отрезок активности мозга с одним из четырёх поведенческих состояний. Исследователи проверили разные длины окна и обнаружили, что четыре секунды дают наилучший баланс между улавливанием устойчивого поведения и избеганием смешения состояний, достигая почти 89% точности. Конкурирующие модели из недавних работ по интерфейсам мозг‑компьютер показали себя хуже на этом требовательном, натуралистичном наборе данных.
Множество областей мозга лучше, чем одна
Ключевой вопрос заключался в том, лучше ли сосредоточить много электродов в одной «избранной» области или распределить их по мозгу. Когда модель обучали на сигналах одной области за раз, результаты сильно варьировали и зачастую были скромными. Объединение всех восьми областей повысило среднюю точность почти до 88%. Команда затем провела честные сравнения, сохраняя общее число каналов и меняя лишь их размещение. При небольшом количестве каналов концентрация в одной области давала незначительно лучшие результаты. Но как только в анализ включали сигналы из пяти и более областей, распределённая схема явно опережала и продолжала улучшаться, тогда как конфигурация в одной области достигала плато. Это указывает на то, что повседневные состояния — отдых, прогулка и кормление — являются действительно широкомасштабными явлениями мозга, а не результатом активности какой‑то единой «центральной» области. 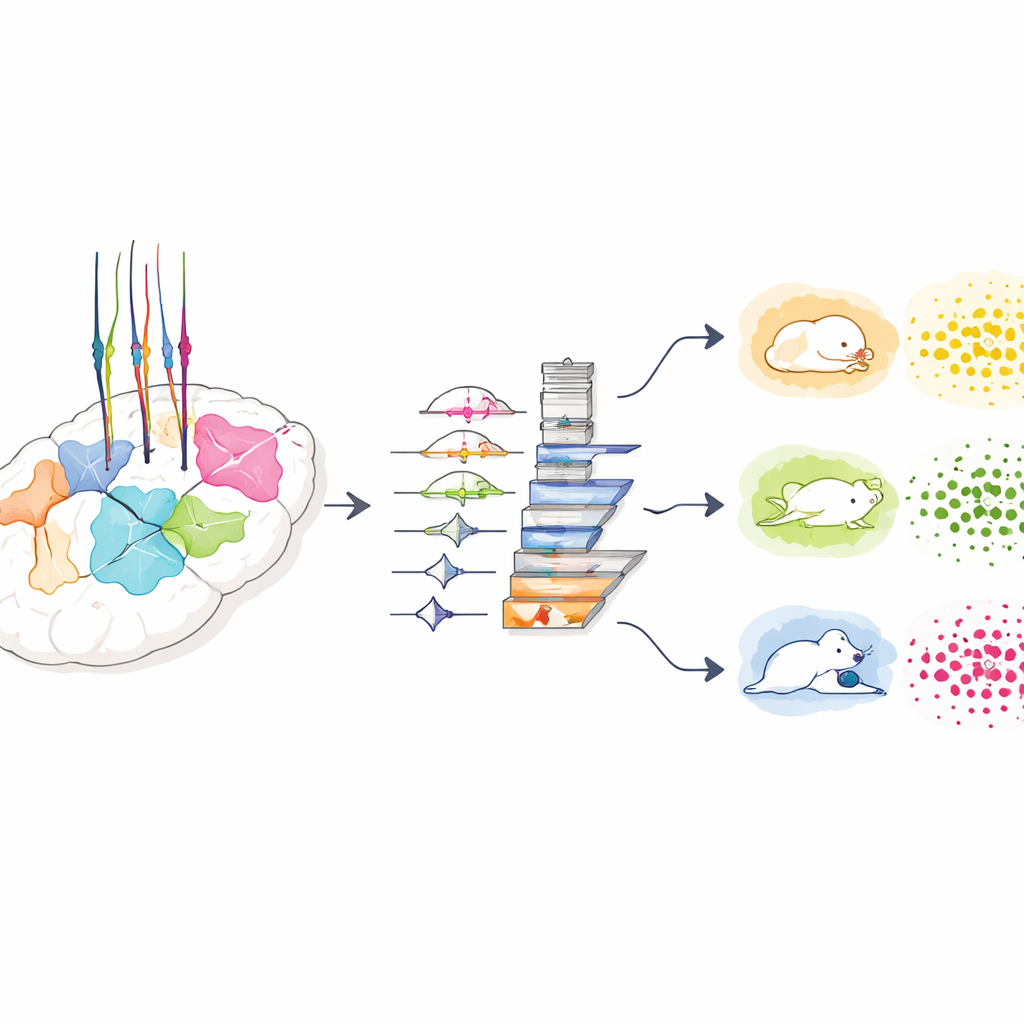
Стабильный декодинг на протяжении дней и у разных мышей
Для будущего клинического или вспомогательного применения декодер должен сохранять работоспособность не только в рамках одной сессии или одного животного. Поэтому исследователи проверили, справится ли их модель с новыми днями и новыми животными без постоянной дообучки. При обучении на нескольких днях данных от одной мыши и последующем тестировании на более поздних днях точность поднялась до примерно 85%, близко к показателям в тот же день, даже без перенастройки модели. В более жёстком испытании систему обучали на трёх мышах и оценивали на четвёртой. Удивительно, но модель всё ещё могла угадывать поведенческое состояние этого животного с примерно 70% точностью прямо «из коробки», а простая донастройка на части данных новой мыши повышала точность выше 80%.
Что это значит для будущих нейроинтерфейсов
Проще говоря, исследование показывает, что мягкая многорегиональная «сеть прослушивания» в сочетании с мощным алгоритмом обучения может с высокой надёжностью декодировать, что делает свободно движущаяся мышь, в течение недель и у разных животных. Для неспециалистов ключевая мысль в том, что состояния мозга — отдых, исследование и еда — записаны в крупномасштабных паттернах, распределённых по всему мозгу, и что гибкая электроника вместе с ИИ может читать этот распределённый код без повреждения тканей и без старта «с нуля» каждый день. В долгосрочной перспективе аналогичные подходы могут помочь в мониторинге внутренних состояний при заболеваниях мозга, в управлении терапиями и в создании интерфейсов мозг‑компьютер, работающих в более естественных, повседневных условиях.
Цитирование: Tian, Y., Li, G., Su, H. et al. A multi-region flexible neural interface for behavioral state decoding in freely moving mice. Microsyst Nanoeng 12, 154 (2026). https://doi.org/10.1038/s41378-026-01258-5
Ключевые слова: интерфейс мозг-компьютер, нейронный декодинг, гибкие электроды, поведенческое состояние, глубокое обучение