Clear Sky Science · pt
Detecção de objetos subaquáticos em tempo real via dinâmica em domínio de frequência e modulação espacialmente aprimorada de características
Ver com clareza sob as ondas
O mundo sob o mar é vital para a segurança alimentar, energia e saúde ambiental, mas também é difícil de enxergar. Água turva, partículas em suspensão e luz fraca podem tornar até tarefas simples, como contar estrelas-do-mar ou inspecionar tubos no leito marinho, surpreendentemente difíceis. Este estudo apresenta um novo método de visão computacional que ajuda robôs e câmeras subaquáticas a detectar pequenos animais marinhos com mais precisão e mais rapidez, mesmo quando a visão está borrada ou encoberta.
Por que a visão subaquática é tão difícil
Diferente do ar, a água refrata e espalha a luz, especialmente os vermelhos e amarelos que nossos olhos usam para contraste. Imagens tomadas debaixo d’água frequentemente parecem azul-esverdeadas, nebulosas e pobres em detalhes, com forte retroespalhamento de partículas flutuantes. Pequenos animais, como vieiras ou ouriços-do-mar, podem ocupar apenas alguns pixels numa foto e se confundir facilmente com rochas, areia ou algas. Softwares de detecção tradicionais, originalmente projetados para imagens nítidas em terra, tendem a perder esses alvos tênues ou confundir entulho de fundo com animais reais. Ao mesmo tempo, robôs e sensores subaquáticos normalmente operam com hardware limitado, então o método de detecção precisa ser rápido e leve, não apenas preciso.
Uma forma mais rápida de interpretar imagens ruidosas
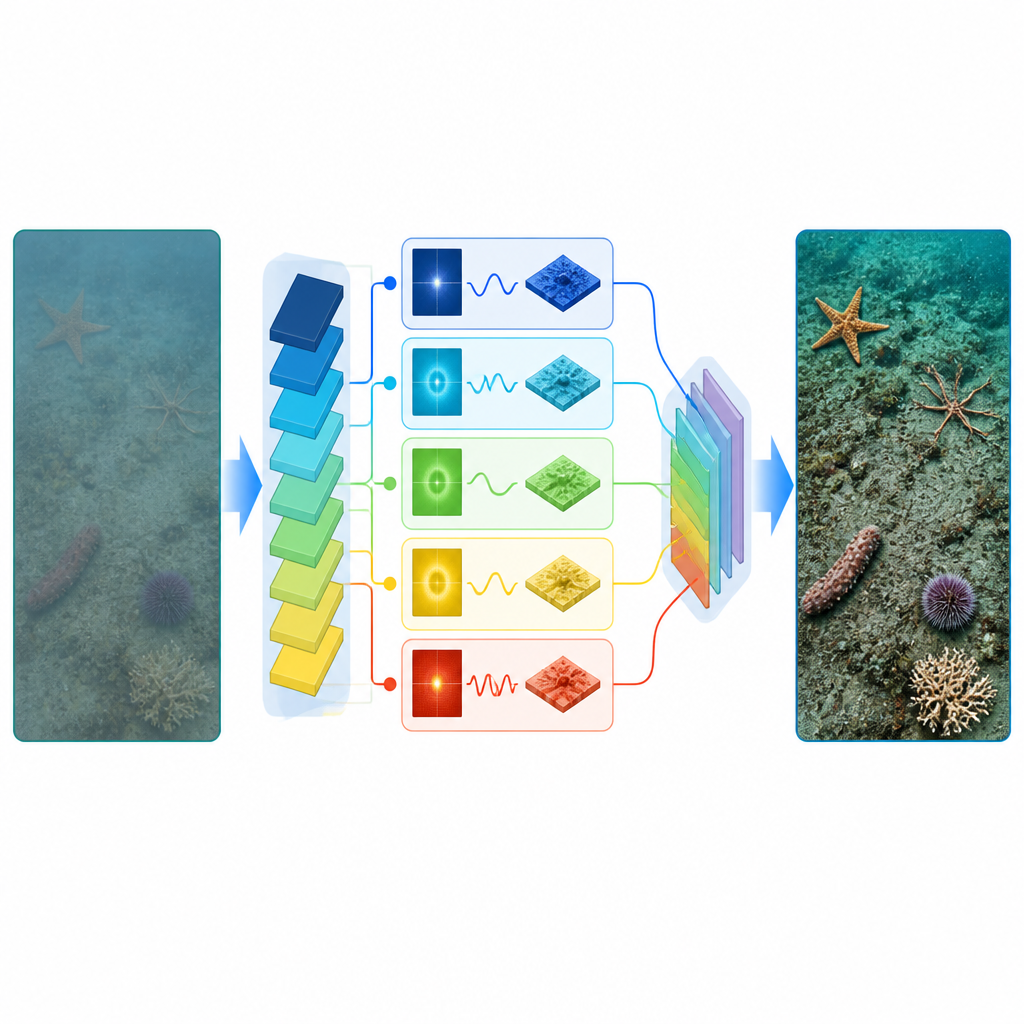
Os autores partem de uma família recente de modelos conhecida como Detection Transformers, que escaneia uma imagem aprendendo as relações entre todas as suas partes em vez de mover uma pequena janela sobre ela. A variante deles mantém a velocidade em tempo real de um sistema anterior chamado RT-DETR, mas substitui a espinha dorsal por uma nova chamada FasterFDBlock, melhor adaptada a cenas subaquáticas ruidosas. Essa espinha dorsal combina um truque chamado convolução parcial, que processa apenas uma fração dos canais da imagem para economizar tempo, com uma visão baseada em frequência da imagem. Ao operar no domínio da frequência, o modelo consegue separar ruído pontilhado aleatório de arestas nítidas que contornam os animais, atenuando o primeiro enquanto preserva o segundo e reduzindo cálculos desnecessários.
Mantendo pequenos animais em foco
Redes profundas de visão costumam perder detalhes finos à medida que reduzem repetidamente a imagem para extrair padrões de nível superior. Isso pode ser fatal para detectar vieiras ou pequenas estrelas-do-mar que já estão no limite da visibilidade. Para combater isso, os pesquisadores redesenham o bloco de atenção central no codificador, criando o que chamam de AIFI-SEFN. Em termos simples, um ramo desse módulo observa a imagem global com atenção, enquanto um ramo acompanhante foca na textura e forma locais. Ele agrega e amplia características em diferentes escalas, usa convoluções leves para capturar bordas e padrões, e então controla quanto desse detalhe é permitido passar. O resultado é uma mistura mais rica de contexto global e estrutura local nítida, de modo que pequenos animais se destacam com mais clareza sobre leitos rochosos e plantas.
Misturando informações entre escalas
Imagens subaquáticas raramente contêm objetos de um único tamanho; o mesmo tipo de organismo pode aparecer como um pontinho distante ou uma mancha grande em primeiro plano. Formas simples de fundir informações de camadas rasas e profundas, como somar mapas de características, podem enterrar detalhes pequenos sob sinais de alto nível ou deixar o ruído superficial dominar a cena. O novo módulo de Modulação de Características Multiescala enfrenta isso resumindo primeiro o que cada camada “vê” por meio de pooling global, e então atribuindo pesos adaptativos a características semânticas e detalhadas para cada canal. Esses pesos sempre somam um, então o modelo precisa decidir, canal a canal, se detalhe ou contexto amplo importa mais. Essa mistura seletiva fortalece os sinais de alvos reais e amortece distrações de rochas, areia e sombras, sem acrescentar muito custo extra.
Quão bem o método funciona
A equipe testou sua abordagem em um conjunto de dados público desafiador de imagens subaquáticas que inclui pepinos-do-mar, ouriços-do-mar, vieiras e estrelas-do-mar, muitos deles pequenos, sobrepostos ou parcialmente ocultos. Em comparação com o RT-DETR original, o novo sistema elevou a métrica padrão de detecção (mAP — mean Average Precision) de 70,4 para 72,1 por cento, reduzindo ao mesmo tempo o número de parâmetros em mais de um quarto e diminuindo a quantidade de cálculo em quase um quarto. Ainda roda a mais de 70 quadros por segundo, rápido o bastante para uso em tempo real em hardware gráfico típico. Comparações visuais de mapas de calor e resultados de detecção mostram que o modelo aprimorado se prende mais firmemente aos animais reais, ignora texturas confusas em rochas e algas e recupera mais alvos pequenos ou de baixo contraste em cenas turvas ou com pouca luz.
O que isso significa para o trabalho subaquático
Em termos práticos, esta pesquisa mostra como ensinar um modelo enxuto e rápido a ver melhor em um dos cenários visuais mais desafiadores da Terra. Ao moldar cuidadosamente como a rede lida com frequências ruidosas, detalhes locais e características em diferentes escalas, os autores tornam a detecção subaquática de objetos mais precisa e eficiente. Esse equilíbrio é importante para veículos subaquáticos autônomos e outros sistemas de campo que precisam tomar decisões rápidas e confiáveis com poder computacional limitado. À medida que esses métodos forem adaptados a mais conjuntos de dados e plataformas embarcadas, poderão ajudar cientistas a monitorar a vida marinha, engenheiros a inspecionar estruturas subaquáticas e robôs a navegar terrenos complexos do leito marinho com maior confiança.
Citação: Cai, S., Zhu, A. Real-time underwater object detection via frequency-domain dynamics and spatially enhanced feature modulation. Sci Rep 16, 14884 (2026). https://doi.org/10.1038/s41598-026-44628-9
Palavras-chave: detecção de objetos subaquáticos, veículos subaquáticos autônomos, visão em tempo real, reconhecimento de pequenos objetos, características em domínio de frequência